

Теоретические положения
Несмотря на то, что в настоящее время идет бурный процесс внедрения в практику бесконтактных систем управления, достаточно широкое применение в электроприводе находят контакторные системы управления. Это объясняется тем, что контакторные системы дешевле бесконтактных систем и более просты в наладке и эксплуатации.
РАСЧЕТ СТУПЕНЕЙ ПУСКОВЫХ СОПРОТИВЛЕНИЙ
Расчет можно производить аналитическим или графическим способом. Для расчета графическим способом строят пусковую диаграмму. Построение пусковой диаграммы начинают с построения естественной характеристики. Для этого достаточно двух точек, так как она является прямой линией. Одной точкой будет номинальный режим работы двигателя - (Н, МН). Второй точкой - идеальный холостой ход (0, М = 0). Скорость идеального холостого хода двигателя определяется по формуле:

 ,
(
1 )
,
(
1 )
где
 – конструктивный
коэффициент двигателя;
– конструктивный
коэффициент двигателя;
Н – номинальная угловая скорость двигателя в рад/с;
IН – номинальный ток якоря двигателя;
UН – номинальное напряжение якоря двигателя;
Rа – сопротивление якорной цепи (обмотки якоря, компенсационной обмотки и обмотки дополнительных полюсов).
После построения естественной характеристики двигателя определяют значения пускового момента или тока из условия допустимого значения. Для двигателей постоянного тока нормального исполнения МДОП = 2.5 МН. Соответственно для тока IДОП = 2.5 IН. Однако в лабораторной работе принимаем максимальный пусковой ток I1 = IН, что увеличивает время пуска и тем самым обеспечивает большую наглядность протекания переходных процессов. Зная максимальный пусковой ток I1 и число ступеней, подбирают переключающий ток I2 так, чтобы диаграмма имела целое число заданных ступеней (рис. 1).
Полное сопротивление якорной цепи определяется через максимальный пусковой ток I1:

 .
.
Зная это сопротивление, графически можно найти сопротивление пусковых ступеней:
 ;
;
 ;
;
 .
.
Эти сопротивления можно найти и аналитически по формуле:
 ,
( 2 )
,
( 2 )
где i номер ступени;
m число ступеней;
отношение максимальных моментов (токов) M1(I1) к переключающим M2(I2):
 .
.
Значение при заданном числе ступеней можно найти из выражения
 .
( 3 )
.
( 3 )
Если максимальный ток равен номинальному (как в данной лабораторной работе), то выражение (3) преобразуется к виду
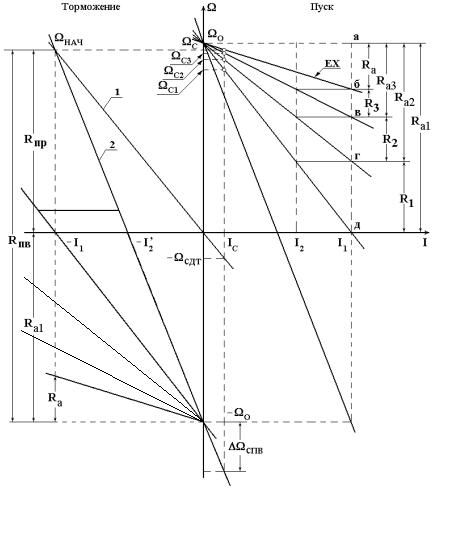
Рис. 1 Пусковая диаграмма трехступенчатого пуска и график изменения скорости при динамическом торможении и торможении противовключением.
1 - динамическое торможение,
2 - торможение противовключением.
 ,
,
где ra относительное сопротивление якорной цепи двигателя;
Rн номинальное сопротивление двигателя.
РАСЧЕТ ТОРМОЗНЫХ СОПРОТИВЛЕНИЙ
Величина полного сопротивления в якорной цепи при торможении противовключением определяется из выражения:
нач
 ,
( 4 )
,
( 4 )
где ЕНАЧ - начальное значение ЭДС двигателя при торможении.
Дополнительное сопротивление в якорной цепи при динамическом торможении можно найти по формуле:
нач
 .
( 5 )
.
( 5 )
ЕНАЧ может быть определена из предшествовавшего торможению установившегося режима работы:
нач
 ,
( 6 )
,
( 6 )
где Ic ток статической нагрузки.
Величина ступени противовключения определяется из выражения:
 .
.
РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ
Для построения временных зависимостей необходимо определить время при пуске на каждой ступени, время торможения противовключением и время динамического торможения.
Временные зависимости скорости и тока при пуске определяются по формулам:
начi

 ,
( 7 )
,
( 7 )
 ,
( 8 )
,
( 8 )
где i, Ii – значения скорости и тока на i-й ступени;
НАЧi – начальное значение скорости на i-й ступени;
Сi – установившееся значение скорости на i-й ступени;
t – текущая координата времени внутри каждой ступени;
TMПi – механическая постоянная времени привода на i-й пусковой ступени;
Время работы на каждой ступени при пуске определяется по формуле:
 ,
( 9 )
,
( 9 )
ТMПi можно определить по формуле
 (
10 )
(
10 )
где i и Ii - приращение скорости и тока на i-й пусковой ступени;
J - момент инерции привода.
Процесс реверса можно рассматривать как два процесса: процесс торможения противовключением и процесс разгона в другую сторону.
Процесс разгона был рассмотрен ранее, поэтому рассмотрим только процесс торможения противовключением.
Временные зависимости скорости и момента при торможении противовключением определяются по формулам :
 ,
( 11 )
,
( 11 )
где С – значение скорости, предшествующий торможению (скорость с которой
начинается процесс торможения);
CПВ – изменение скорости на характеристике противовключения под
действием статического момента.
 ,
,
 ,
( 12 )
,
( 12 )
ТМПВ – механическая постоянная времени привода при торможении противовключением, равная
I1 и I/2 – значения начального тормозного тока и тока двигателя в конце процесса торможения; НАЧ = С - скорость, с которой начался процесс торможения противовключением (рис. 1).
Время при торможении противовключением
 .
( 13 )
.
( 13 )
Временные зависимости скорости и тока при динамическом торможении определяются по формулам:
 ,
( 14 )
,
( 14 )
 ,
( 15 )
,
( 15 )
где С , I1 - скорость и ток двигателя в начале торможения (рис. 1 );
торможения при активном моменте на валу.
 — установившаяся скорость в
режиме динамического
— установившаяся скорость в
режиме динамического
TМДТ - механическая постоянная времени привода при динамическом торможении.
Время динамического торможения
 .
( 16 )
.
( 16 )
РАСЧЕТ УСТАВОК РЕЛЕ
Уставки реле времени
 ,
,
где tПi - расчетное время пуска или торможения на отдельных ступенях; tС = 0.03 с - собственное время срабатывания реле.
Уставки реле противовключения (РПВ, РПН) должны быть на 20% меньше напряжения на катушке реле при неподвижном якоре и полном сопротивлении в силовой цепи, т.е.
 .
.
Следует заметить, что напряжение UoРПВ, РПН зависит от точки подключения этих реле к пусковому сопротивлению. Рекомендуется подключать реле таким образом, чтобы в начальный момент торможения с максимальной скорости напряжение на них было равно нулю. Для чего необходимо иметь падение напряжения на сопротивлении Rx равным напряжению питания. Таким образом можно записать:
 ,
,
откуда
 .
.
Учитывая, что в режиме торможения с максимальной скорости ток двигателя (I2/) при неподвижном якоре с включенной ступенью противовключения равен половине максимального (I1), получим
 .
.
Поэтому
 .
.
Уставки максимально токовых реле для двигателя нормального исполнения выбираются из условия IУРМ = 1,3I1.
Уставка реле обрыва поля (РОП): IУРОП = 0.9IН.
Уставка реле напряжения: UУРН = 0.9UН.