

Математические модели динамических систем в форме уравнений для переменных состояния
..pdfКафедра РТС
Тисленко В.И.
Математические модели динамических
систем в форме уравнений для
переменных состояния
Учебно-методическое пособие к практическим работам по теме «Математические модели динамических систем» по курсу «Радиосистемы управления» (спец. 210304)
Томск - 2011
1
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ПРЕОБРАЗОВАНИЯ ВХОДНОГО СИГНАЛА В ЛИНЕЙНОЙ ДИНАМИЧЕСКОЙ СИСТЕМЕ МОЖЕТ ПРЕДСТАВЛЕНА В НЕСКОЛЬКИХ ЭКВИВАЛЕНТНЫХ ФОРМАХ. В ЧАСТНОСТИ:
1.В ИНТЕГРАЛЬНОЙ ФОРМЕ – ИНТЕГРАЛ СВЕРТКИ, КОТОРЫЙ ОПРЕДЕЛЯЕТ ВЫХОДНУЮ РЕАКЦИЮ ДИНАМИЧЕСКОЙ СИСТЕМЫ В ВИДЕ ИНТЕГРАЛА СВЕРТКИ ВХОДНОГО СИГНАЛА (ОВ) С ИМПУЛЬСНОЙ РЕАКЦИЕЙ СИСТЕМЫ (В СЛУЧАЕ СИСТЕМЫ С НЕСКОЛЬКИМИ ВХОДАМИ С МАТРИЦЕЙ ИМПУЛЬСНЫХ РЕАКЦИЙ) .
2.В ВИДЕ НЕОДНОРОДНОГО ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ N-ГО ПОРЯДКА ДЛЯ ВЫХОДНОГО СИГНАЛА СИСТЕМЫ ПРИ ЗАДАННОМ ВХОДНОМ СИГНАЛЕ.
3.В ВИДЕ ПЕРЕДАТОЧНОЙ ФУНКЦИИ, СВЯЗЫВАЮЩЕЙ ИЗОБРАЖЕНИЯ ПО
ЛАПЛАСУ ВХОДНОГО И ВЫХОДНОГО СИГНАЛОВ СИСТЕМЫ.
4. В ВИДЕ КОМПЛЕКСНОЙ ЧАСТОТНОЙ ХАРАКТЕРИСТИКИ СИСТЕМЫ, СВЯЗЫВАЮЩЕЙ КОМПЛЕКСНЫЙ ЧАСТОТНЫЙ СПЕКТР ВХОДНОГО И ВЫХОДНОГО СИГНАЛОВ
В современной теории автоматического управления
используются векторно-матричные
модели динамических систем в форме систем дифференциальных уравнений первого порядка для
переменных состояния
ПРЕДСТАВЛЕННЫЙ НИЖЕ МАТЕРИАЛ ИСПОЛЬЗУЕТ ИНФОРМАЦИОННЫЙ ИСТОЧНИК, ПРИВЕДЕННЫЙ |
2 |
В СЕТИ ИНТЕРНЕТ |
|

Понятие пространства состояний
Для получения векторно-матричной модели исследуемая динамическая система представляется
в виде “черного ящика” с некоторым числом входных и
выходных каналов.
Скалярное (а) и векторное (б) представления динамической системы
в виде "черного ящика"
3

Входные переменные r - число входов
Выходные переменные m - число выходов
Переменные состояния n - число переменных
состояния
Состояние системы –
это та минимальная информация о прошлом, которая необходима для полного описания будущего поведения (т.е. выходов) системы, если поведение ее входов известно.
4

Уравнения состояния и выхода
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dxi |
= f ( x ,x |
2 |
,..,x |
n |
,u ,u |
2 |
,..,u |
r |
,t ), i =1,2,...,n |
||
|
|
|||||||||||
|
dt |
i |
1 |
|
|
1 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
y j = ϕj ( x1,x2 ,..,xn ), |
j =1,2,..,m. |
|||||||||||
Стационарная
система
x = Ax + Bu,
y= Cx + Du.
А- матрица состояния системы, размером n x n,
В - матрица управления (входа), n x r,
С - матрица выхода по состоянию, m x n, D - матрица выхода по управлению, m x r.
Очень часто D=0, т.е. выход непосредственно не зависит от
входа.
5

Структурная схема системы в векторной форме:
S - блок интеграторов; A,B,C,D - блоки матричных
усилителей
6

Переход от уравнений состояния к уравнениям «вход-выход»
Уравнения состояния: x = Ax +Bu
y =Cx
Преобразуем:
( pE − A)x = Bu
x=( pE − A)−1Bu
y=C( pE − A)−1Bu
Тогда передаточная функция: W ( p) =C( pE − A)−1B
Этот переход однозначен.
7
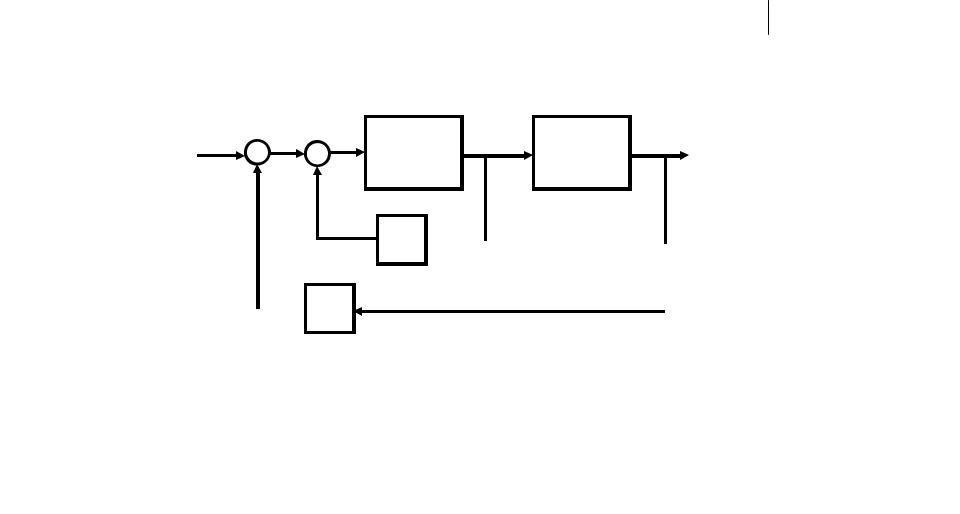
Другой способ получения передаточной функции – структурные
преобразования
Пример. Пусть
A = |
|
0 −1 |
|
B = |
|
0 |
|
C = |
|
1 0 |
|
|
|
|
|
||||||
|
|
|
|
|
||||||
|
|
−2 −3 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Структурная схема системы имеет вид:
u |
+ + |
1 |
x2 |
1 |
x1=y |
|
p |
|
p |
|
|
|
|
|
|
|
|
3 
 -2
-2
Сворачивая схему, получим W (p) = |
y |
= |
1 |
|
|
u |
p2 + 3p + 2 |
||||
|
|
||||
|
|
|
|||
8

Переход от передаточной функции к уравнениям
состояния для систем с одним входом и одним выходом
pn y(t ) +a1pn−1y(t ) +... +an y(t ) = bu(t ), pn y(t ) = −a1pn−1y(t ) −... −an y(t ) +bu(t ).
|
|
|
|
|
|
|
|
|
y = x1 |
|
|
|
|
|
|
||
x1 = x2 |
|
|
|
|
|
|
||
x2 |
= x3 |
|
|
|
|
|
|
|
......... |
|
|
|
|
|
|
||
xn−1 = xn |
|
|
|
|
|
|
||
x |
n |
= −a x −a |
x |
2 |
−... −a x |
n |
+b u |
|
|
n 1 n−1 |
|
1 |
m |
9 |
|||
|
|
|
|
|
|
|
|
|

Векторно-матричная модель САУ
x |
|
|
|
0 |
1 |
0 |
|
... |
0 |
|
|
|
x |
|
|
|
|
||
|
|
|
|
|
|
|
|
||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
0 |
|
x2 |
|
|
|
0 |
0 |
1 |
|
... |
0 |
|
|
|
x2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
0 |
|
|||||||||
... |
|
= |
|
.. |
.. |
.. |
|
.. .. |
|
|
|
... |
|
+ |
u |
||||
xn−1 |
|
|
|
0 |
0 |
0 |
|
.. |
1 |
|
|
|
xn−1 |
|
|
... |
|
||
|
|
|
|
|
|
|
|
|
b |
|
|||||||||
x |
|
|
|
|
−a −a |
−a |
|
.. −a |
|
|
|
x |
|
|
|
|
|||
n |
|
|
|
−2 |
|
|
|
n |
|
|
|
|
|||||||
|
|
|
|
n |
n−1 |
n |
|
1 |
|
|
|
|
|
|
|
|
|||
y = x1
Управляемая каноническая форма матрица состояния имеет
форму Фробениуса (нормальную форму). Характеристическое уравнение располагается в последней строке.
10