

Sherstnyakov_Yu_G_Osnovy_elektromekhaniki
.pdfзнак ЭДС сохраняется и ток Ia = −E/(Ra +Rр), т. е. становится отрицательным. В этом режиме уравнение механической характеристики имеет вид ω = −[(Ra +Rр)/(kekM)]M. Этому уравнению соответствует прямая, проходящая через начало координат из квадранта II в квадрант IV (характеристика 3). Крутизна характеристики определяется сопротивлением цепи якоря. При замыкании якоря накоротко торможение двигателя протекает более интенсивно, при этом характеристика торможения параллельна естественной характеристике в режиме двигателя (характеристика 4).
Процесс торможения заканчивается при ω = 0. Если к валу двигателя приложен реактивный момент сопротивления, то двигатель в этой точке остановится, а если активный момент сопротивления — то скорость вращения под его действием изменит направление и станет отрицательной. Установившаяся скорость определяется точкой пересечения характеристики динамического торможения с характеристикой Mс = const в квадранте IV. При этом ток в цепи якоря при работе на участках характеристик в квадранте IV Ia = E/(Ra +Rр). К якорю подводится мощность
со стороны рабочего механизма: P |
= P |
= P |
= EI |
, и эта мощ- |
2 |
с |
эм |
a |
|
ность расходуется в сопротивлении цепи якоря для обеспечения тормозного режима: EIa = (Ra +Rд)Ia2.
3.6. Рабочие характеристики ДПТ независимого возбуждения
Рабочие характеристики двигателя параллельного возбуждения приведены на рис. 3.6. Механическая характеристика n = f(M) обладает большой жесткостью, низким значением КПД η = P2/P1 при загрузке двигателя P2/Pн < 0,3. Характеристики М, I1 = Ia, P1 = f(P2) при U = const являются линейными.
Энергетическая диаграмма двигателя при ω = const изображена на рис. 3.7. Полная электрическая мощность, подводимая к двигателю из сети, P1 = P1a +Pв; Pв = UвIв — мощность в обмотке и в регулирующем реостате обмотки возбуждения; P1a = Pэл +
+ Pэм = (Ra + Rд)Ia2 + EIa = UIa — мощность электрической энергии, подводимая к якорю; Pэл = (Ra +Rд)Ia2 — мощность
электрических потерь в обмотке якоря и в добавочном сопротивлении; Pэм = EIa = P0 +P2 — электромагнитная мощность;
40
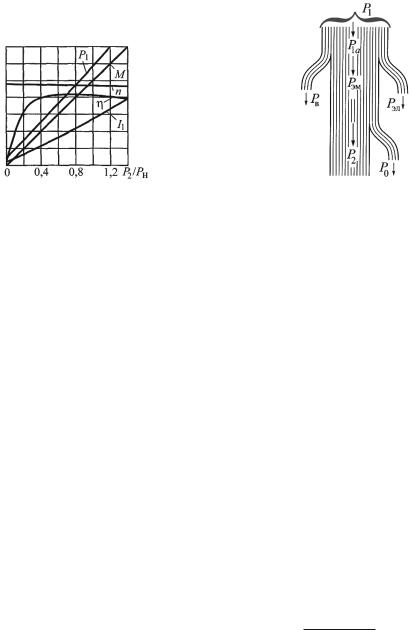
Рис. 3.6. Рабочие характе- |
Рис. 3.7. |
Энергети- |
ристики двигателя |
ческая |
диаграмма |
|
двигателя |
|
P0 = Pмаг +Pмех; Pмаг — магнитные потери мощности в стали магнитопровода от гистерезиса и вихревых токов; Pмех — механические потери мощности, вызванные трением в подшипниках, трением щеток о коллектор и вращающегося якоря о воздух; P2 — механическая мощность на валу двигателя.
Мощность Pв мала по сравнению с мощностью P1a, а мощность P0 — по сравнению с мощностью P2, поэтому в первом приближении ими можно пренебречь. При таком подходе КПД
η = P /P |
= P |
/P |
1a |
= EI /UI |
a |
= E/U. При использовании в |
2 |
1 эм |
|
a |
|
цепи возбуждения двигателя постоянных магнитов Pв = 0 и КПД
η= Pэм/P1a.
3.7.ДПТ последовательного возбуждения
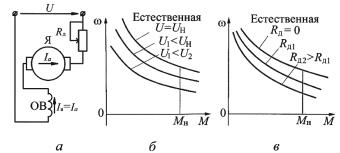
Вэтих двигателях ток якоря одновременно является и то-
ком возбуждения (рис. 3.8, а), т. е. Ia = Iв. Поэтому при увеличении нагрузки растет ток и соответственно растет поток возбуждения Ф до насыщения магнитной системы пропорционально току Ia. При Ia ≈ Iн магнитная система насыщается и пропор-
циональность между Φ и Ia нарушается, поток с ростом тока практически не увеличивается. Предположим, что в ненасыщенной магнитной системе (Ia < Iн)Φ = kфIa. Для этого случая
M = CM ΦIa = CMkфIa2 = CM Φ2/kф, а Ia = M/(CMkф) и вы-
41
ражение для механической характеристики будет иметь вид
ω = |
U |
− |
(Ra +Rд)Ia |
= |
|
U |
− |
R |
, |
|
|
|
CMkф |
||||||
CekфIa |
CekфIa |
|
CMkфM |
||||||
где Ce = CM; R = Ra +Rд.
Рис. 3.8. Схема и характеристики двигателя с последовательным возбуждением:
а — принципиальная схема двигателя; б — механические характеристики при различных значениях напряжения U; в — механические характеристики при различных значениях сопротивления Rд
При ненасыщенном магнитопроводе зависимость ω = f(M) имеет вид гиперболы, постепенно переходящей при нагрузке близко к номинальной и превышающей ее в прямую линию (рис. 3.8, б). При малых значениях тока (момента) скорость двигателя резко возрастает, что может привести к его механическому разрушению (говорят, что двигатель «идет вразнос»). Поэтому работа таких двигателей при низких нагрузках P2 < 0,25Pн, а также пуск на холостом ходу при U = Uн недопустимы. Двигатель должен иметь жесткое соединение (муфта, редуктор) c исполнительным механизмом, применение ременной передачи не допускается, так как при ее обрыве двигатель переходит в режим холостого хода.
Искусственные характеристики двигателя при различных значениях U (см. рис. 3.8, б) и при различных сопротивлениях в цепи якоря Rд (рис. 3.8, в) расположены ниже естественной характеристики. При больших значениях тока (момента) якоря его угловая скорость вращения изменяется мало. Такую характеристику называют мягкой. При увеличении момента в k раз ток якоря и по-
42

требляемая от сети мощность увеличиваются только в √k раз. Возможность получения большого пускового момента и мягких скоростной и механической характеристик обеспечила этим двигателям широкое применение в электрическом транспорте (трамваи, троллейбусы, электропоезда).
3.8.Универсальные коллекторные двигатели
Вустройствах автоматики, в различных электробытовых приборах и в приводах электроинструментов широко применяют универсальные коллекторные двигатели мощностью до нескольких сот ватт, которые могут работать как от сети постоянного тока, так и от сети однофазного переменного тока. Двигатель устроен так же, как и ДПТ с последовательным возбуждением, только его магнитная система выполняется полностью шихтованной, а обмотка возбуждения — с ответвлениями. При работе от сети переменного тока часть витков обмотки возбуждения отключают, т. е. уменьшают поток возбуждения. Универсальный двигатель при работе на постоянном токе ведет себя так же, как и ДПТ с последовательным возбуждением, а его работа на переменном токе имеет ряд специфических особенностей.
У двигателя последовательного возбуждения ток якоря является одновременно и током возбуждения, что обеспечивает почти одновременное изменение направления тока в обмотке якоря ia и магнитного потока возбуждения ф. Положим ia = Im sin ω1t. Магнитный поток также будет изменяться по синусоидальному закону ф = Φm sin ω1t− δ, где δ — угол сдвига фаз между током возбуждения и магнитным потоком, обусловленный магнитными потерями в двигателе. Мгновенное значение электромагнитного моменте M = CMiaф = CMImΦm sin ω1tsin(ω1t − δ) = 0,5CMIm ×
×Φm cos δ −0,5CMImΦm sin(2ω1t− δ).
Из этого выражения видно, что момент состоит из двух составляющих. Первая представляет собой постоянную составляющую электромагнитного момента Mпост = 0,5CMImΦm cos δ, а вторая — переменную составляющую момента, изменяющуюся
с двойной частотой, Mпер = −0,5CMImΦm sin(2ω1t− δ). Таким образом, результирующий электромагнитный момент двигателя
43
является переменным, а в отдельные небольшие промежутки вре-
мени на участке периода, когда M = Mпост +Mпер < 0, — даже тормозным. Пульсации электромагнитного момента практически
не нарушают работу двигателя — его вращение оказывается равномерным, так как происходит при частоте fM = 2f1 и большом моменте инерции.
Частота вращения этих двигателей регулируется так же, как частота двигателей постоянного тока последовательного возбуждения. Недостатком коллекторных двигателей на переменном токе являются низкий КПД, усиленное искрение на коллекторе, радиопомехи, шум, невысокая надежность.
ЛИТЕРАТУРА
Баранов Е.Н. Расчeт электромеханических устройств. М.: Изд-во МГТУ им. Н.Э. Баумана, 2004. 24 с.
Баранов Е.Н., Шерстняков Ю.Г. Расчет характеристик электрических преобразователей. М.: МВТУ им. Н.Э. Баумана, 1988. 26 с.
Брускин Д.Э., Зорохович А.Е., Хвостов В.С. Электрические машины и микромашины. М.: Высш. шк., 1990. 528 с.
Бут Д.А. Основы электромеханики. М.: Изд-во МАИ, 1996. 468 с. Вольдек А.И. Электрические машины. Л.: Энергия, 1974. 839 с. Гольберг О.Д., Хелемская С.П. Электромеханика. М.: Академия,
2007. 512 с.
Епифанов А.П. Электромеханические преобразователи энергии. СПб.: Лань, 2004. 208 с.
Кацман М.М. Электрические машины. М.: Высш. шк., 2003. 469 с.
45
ОГЛАВЛЕНИЕ |
|
Введение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
3 |
1. Физические основы электромеханического преобразования |
|
энергии . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
4 |
1.1. Основные физические законы электромеханического |
|
преобразования энергии . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
4 |
1.2. Элементарная электрическая машина . . . . . . . . . . . . . . . . . . . . . |
9 |
1.3. Структура электрической машины . . . . . . . . . . . . . . . . . . . . . . . . |
12 |
1.4. Классификация электрических машин . . . . . . . . . . . . . . . . . . . . . |
13 |
2. Электрические машины постоянного тока . . . . . . . . . . . . . . . . . . . . . . |
14 |
2.1. Принцип действия, устройство, функциональные |
|
особенности МПТ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
15 |
2.2. Устройство и функциональные особенности коллекторных |
|
МПТ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
19 |
2.3. Магнитное поле МПТ. Реакция якоря . . . . . . . . . . . . . . . . . . . . . |
24 |
2.4. Коммутация в МПТ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
26 |
2.5. Способы возбуждения МПТ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
27 |
2.6. ЭДС якоря и электромагнитный момент . . . . . . . . . . . . . . . . . . . |
28 |
3. Двигатели постоянного тока . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
29 |
3.1. Уравнения ДПТ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
29 |
3.2. Характеристики ДПТ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
32 |
3.3. Пуск ДПТ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
34 |
3.4. Способы регулирования скорости ДПТ . . . . . . . . . . . . . . . . . . . . |
35 |
3.5. Тормозные режимы работы ДПТ . . . . . . . . . . . . . . . . . . . . . . . . . . |
37 |
3.6. Рабочие характеристики ДПТ независимого возбуждения . . |
40 |
3.7. ДПТ последовательного возбуждения . . . . . . . . . . . . . . . . . . . . . |
41 |
3.8. Универсальные коллекторные двигатели . . . . . . . . . . . . . . . . . . |
43 |
Литература . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
45 |
46 |
|
Учебное издание
Шерстняков Юрий Георгиевич Стрелков Борис Викторович Роднов Николай Алексеевич
ОСНОВЫ ЭЛЕКТРОМЕХАНИКИ. МАШИНЫ ПОСТОЯННОГО ТОКА
Редактор С.А. Серебрякова Корректор Е.В. Авалова
Компьютерная верстка В.И. Товстоног
Подписано в печать 26.03.2012. Формат 60×84/16. Усл. печ. л. 2,79. Тираж 100 экз. Изд. № 107.
Заказ
Издательство МГТУ им. Н.Э. Баумана. Типография МГТУ им. Н.Э. Баумана. 105005, Москва, 2-я Бауманская ул., 5.
ДЛЯ ЗАМЕТОК