

Sherstnyakov_Yu_G_Osnovy_elektromekhaniki
.pdfРис. 3.1. Схемы двигателя постоянного тока:
а — принципиальная схема; б — схема замещения; Я — якорь машины постоянного тока; U — напряжение питания цепи якоря; Ia — ток якоря; Rд — добавочное сопротивление резистора в цепи обмотки якоря; Rр.в — сопротивление реостата в цепи возбуждения; ОВ — обмотка возбуждения; Uв — напряжение питания цепи возбуждения; Iв — ток возбуждения; E — ЭДС вращения; Ra = Rпa/(2a) — сопротивление обмотки якоря относительно внешних зажимов; Rпa — сопротивление проводников одной параллельной ветви, включая сопротивление щеток и щеточного контакта
Схема замещения двигателя, работающего в установившемся (статическом) режиме, при котором угловая скорость вращения ω и частота вращения ротора n, связанные зависимостью ω = = (2π/60)n = 0,105n, не изменяются, приведена на рис. 3.1, б. Индуктивности обмоток якоря и возбуждения учитывают только при анализе переходных процессов.
Уравнение равновесия напряжений для цепи обмотки якоря двигателя имеет вид
U = E +(Ra +Rд)Ia, |
|
(3.1) |
||
где E = CeΦω; Ce = pN/(2πa). |
|
|
||
Ток якоря |
|
|
||
Ia = |
U −E |
. |
|
(3.2) |
|
Ra +Rд |
|
|
|
Умножив обе части уравнения (3.1) на ток якоря Ia, получим |
||||
для цепи якоря уравнение мощности UIa |
= (Ra +Rд)I2 |
+EIa; |
||
|
|
|
a |
|
pN
EIa = 2πaΦωIa = ωMэм = Pэм, следовательно, EIa = Pэм есть электромагнитная мощность. Поэтому уравнение мощности можно записать в таком виде:
UIa = (Ra +Rд)Ia2 +Pэм.
30

Отсюда следует, что с увеличением нагрузки на вал двигателя возрастает мощность в цепи обмотки якоря.
Уравнение равновесия моментов имеет вид
Mэм −Mс = |
Jdω |
, или Mэм = Cм ΦIa, |
(3.3) |
dt |
где Cм = pN/(2πa); Jdω/dt — динамический момент; J — момент инерции ротора и всех элементов рабочего механизма, приведенных к угловой скорости вращения двигателя; dω/dt — угловое ускорение ротора; Mс = M0 +M2 — статический момент сопротивления; M0 — момент холостого хода, обусловленный трением в подшипниках, трением щеток о коллектор, потерями мощности в магнитопроводе; M2 — тормозной момент на валу двигателя, создаваемый рабочим механизмом. Обычно M2 > M0, поэтому момент Mс определяется в основном моментом M2.
Статический момент сопротивления бывает двух категорий: реактивный и активный. Реактивный момент сопротивления создается силами трения, веса, резания и может во время работы либо оставаться практически постоянным (Mс = const), либо изменяться в зависимости от частоты вращения. Этот момент изменяет свой знак при изменении направления вращения. Активный момент сопротивления может оказывать и движущее воздействие. Так, вес груза при подъеме груза краном противодействует вращению двигателя, тогда как при спуске груза, наоборот, способствует ему, действует согласно с моментом двигателя. Отметим, что если при Mс = const предварительно не оговорена категория момента сопротивления, то его следует считать активным моментом.
Динамический момент Jdω/dt при равномерной частоте вращения равен нулю. Если же под воздействием каких-либо причин установившийся режим нарушится, тогда скорость изменится и начнется переходный режим работы. При условии Mэм > Mс (dω/dt > 0) двигатель увеличивает скорость вращения, а при Mэм < Mс (dω/dt < 0) — сбрасывает ее. Двигатель обладает некоторым внутренним автоматическим механизмом приведения вращающего момента М к статическому моменту сопротивления Mс, заданному извне. Такой механизм легко проследить, анализируя уравнения (3.1)—(3.3). Предположим, что произошло
31
изменение статического момента сопротивления. Это вызовет изменение угловой скорости вращения двигателя и соответственно ЭДС вращения. Изменение ЭДС повлечет за собой изменение тока в обмотке якоря и соответственно изменение вращающего момента. Эти изменения в переходном режиме будут происходить до тех пор, пока не наступит равенство моментов Мэм = Mс в новом установившемся режиме. Аналогично можно проанализировать и процессы, происходящие в двигателе при изменении тока возбуждения или добавочного сопротивления в цепи якоря.
3.2. Характеристики ДПТ
Работа ЭМ связана с тепловыми, электродинамическими и механическими воздействиями. Их взаимное влияние при определенных условиях может привести к повреждению машины. Значения этих воздействий зависят от значений параметров P, M, n, I, U. Завод-изготовитель устанавливает номинальные значения параметров Pн, Mн, nн, Iн, Uн, при которых гарантируется работоспособность машины в течение определенного срока службы. Эти данные указываются в паспорте машины. В паспорте также приводятся параметры, которые можно использовать при расчете характеристик: сопротивление обмотки якоря Ra, сопротивление обмотки возбуждения Rв, момент инерции ротора J. Все номинальные значения переменных связаны между собой уравнениями установившегося режима работы (3.1)—(3.3) и определяют некоторые рабочие точки статических характеристик. Указанные уравнения позволяют находить по номинальным данным значения величин, не указанные в паспорте, например номинальное значение ЭДС двигателя Eн = Uн −RaIaн, или неизвестные коэффициенты, характеризующие поток возбуждения: ke = CeΦн = Eн/ωн,
kM = CM Φн = Mн/Iaн.
Эксплуатационные свойства двигателя обычно оценивают по совокупности его характеристик: скоростной ( ω = f(Ia)) и механической (ω = f(M)) характеристик при U = const и Iв = const; пусковых, регулировочных и рабочих характеристик М , Ia, n или ω, η, являющихся функциями мощности нагрузки P2 при
U = const.
32

Уравнение скоростной характеристики получают из уравнения равновесия напряжений (3.1): U = E +(Ra +Rд)Ia = CeΦω + +(Ra +Rд)Ia, откуда
ω = |
U |
−(Ra +Rд) |
Ia |
= ω0 − Δω, |
(3.4) |
|
CeΦ |
|
CeΦ |
||||
где ω0 = U/(CeΦ) — скорость идеального холостого хода (при Ia = 0); Δω = (Ra +Rд)Ia/(CeΦ) — снижение скорости в результате влияния нагрузки.
Уравнение механической характеристики ω = f(M) получают подстановкой Ia = M/(Cм Φ) в уравнение (3.4):
U
ω = CeΦ −(Ra +Rд)
M |
= ω0 − Δω. |
(3.5) |
CeCM Φ2 |
Виды скоростной и механической характеристик при U = const зависят от того, как с изменением момента сопротивления изменяется поток двигателя Φ, и различны для двигателей с разными способами возбуждения. Для двигателя с независимым (параллельным) возбуждением, если не учитывать реакцию якоря, поток можно считать величиной постоянной при Iв = const. Тогда из уравнений (3.4) и (3.5) следует, что при U = const и Φ = const скоростная и механическая характеристики являются линейными и падающими, при этом скорость падения (жесткость tg β = M/Δω) зависит от сопротивления цепи якоря (Ra +Rд). Подчеркнем, что в выражение для механической характеристики входит электромагнитный момент.
Используя коэффициенты ke, kM, уравнение механической характеристики можно записать в таком виде:
ω = |
U |
−(Ra +Rд) |
M |
= ω0 − Δω, |
(3.6) |
|
|
||||
ke |
kekM |
при этом влияние потока на механическую характеристику можно учесть с помощью коэффициентов ke = αCeΦ и kM = αCM Φ, где коэффициент αmin α 1 учитывает ослабление потока.
Механическую характеристику ω = f(M) можно рассматривать в качестве регулировочной характеристики ω = f(U) при M = const и Iв = const. Регулировочные характеристики при различных значениях M будут прямолинейны и параллельны.
33
3.3. Пуск ДТП
При пуске необходимо обеспечить требуемое значение пускового момента и ограничить значение пускового тока. В момент пуска двигатель при прямом включении в сеть (Rд = 0) оказывается в режиме короткого замыкания: ω = 0, E = CeΦω = 0 и ток якоря Ia = U/Ra. Поскольку на обмотку подают номинальное напряжение, а ее сопротивление мало,´ значение пускового тока якоря Iaп может в 10—20 раз превышать его номинальное значение. При этом большой пусковой момент создаст ударную нагрузку на вал и рабочий механизм, что может привести к их поломке. На коллекторе может возникнуть круговой огонь, значительное падение напряжения питающей сети и т. п. Прямой пуск возможен только для двигателей малой мощности, у которых резистивное сопротивление якорной обмотки сравнительно велико, а процесс пуска длится не более нескольких секунд.
Ограничение пускового тока достигается или введением в цепь якоря на время пуска дополнительных регулируемых сопротивлений (пусковой реостат), или понижением питающего напряжения с дальнейшим его повышением по мере разгона двигателя для поддержания необходимого значения пускового момента. Очевидно, что во втором случае требуется применять источник регулируемого напряжения. Самым распространенным является пуск с помощью пусковых сопротивлений. По мере разгона ЭДС E растет, ток Ia падает, для поддержания необходимого значения пускового момента следует уменьшать значения сопротивлений. Обычно это делается ступенчато. Реостатный пуск является неэкономичным.
Ни в коем случае нельзя допускать разрыва цепи обмотки независимого (параллельного) возбуждения, так как поток исчезнет не сразу по причине остаточной намагниченности полюсов, которую будет уменьшать реакция якоря, а будет быстро уменьшаться. При малом моменте нагрузки M0 M2 Mн скорость ω согласно выражению (3.4) будет быстро увеличиваться. Это может привести к «разносу» двигателя. При M2 Mн двигатель остановится.
34
3.4. Способы регулирования скорости ДПТ
Из уравнения механической характеристики двигателя |
ω = |
= U/(CeΦ) − (Ra + Rд)M/(CeCM Φ2) = ω0 − Δω следует, |
что |
скорость двигателя пропорциональна подводимому к двигателю напряжению, обратно пропорциональна магнитному потоку и зависит от сопротивления цепи якоря. Механическая характеристика, полученная при отсутствии внешних резисторов в цепи якоря (Rд = 0) и при номинальных значениях напряжения и магнитного потока, называется естественной. Если же хотя бы один из перечисленных параметров изменен, то характеристика называется искусственной. Любую из перечисленных выше характеристик можно построить по двум рабочим точкам, например по точке идеального холостого хода (M = 0; ω = ω0 = U/(CeΦ) = U/ke) и точкe короткого замыкания (в мо-
мент пуска) (ω = 0; M = Mк = CM ΦIaк = kMU/(Ra +Rд)), или можно задаться любым значением Mk из диапазона 0 < Mk <
< Mк и определить частоту вращения якоря ωk = U/ke −(Ra +
+Rд)Mk/(kekM).
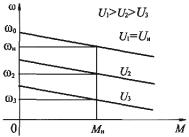
Регулирование скорости изменением напряжения в цепи якоря (якорное управление).
Изменение напряжения на якоре двигателя приводит к изменению скорости идеального холо-
стого хода ω0 = U/(CeΦ), а наклон характеристик Δω = (Ra +
+ Rд)M/(CeCM Φ2) сохраняется неизменным, так как не зависит от напряжения. Поэтому имеем семейство параллельных характери-
стик (рис. 3.2). Характеристика для U1 = Uн является естественной. Регулировать скорость вращения можно изменением напряжения только в сторону его уменьшения от номинального значения, так как увеличение напряжения свыше номинального значения недопустимо.
Регулирование скорости изменением напряжения является наилучшим по сравнению с другими видами регулирования: диапазон
35
регулирования Д = ωmax/ωmin = 20...30 при Mс = const; высокий КПД, так как уменьшение механической мощности на валу
P2 = Mω в результате снижения скорости достигается уменьшением потребляемой из сети электрической мощности P1a = UIa при неизменном токе Ia (M = kMIa = const), т. е. нет дополнительных потерь; высокая плавность регулирования скорости. Этот способ требует применения источника с регулируемым напряжением, обеспечивающим полную мощность двигателя, что является его недостатком.
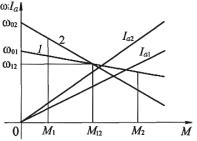
Регулирование скорости изменением потока возбуждения (полюсное управление). Изменение потока возбуждения достигается регулированием тока в обмотке возбуждения. Номинальное значение потока близко к значению потока насыщения, а потому поток возбуждения можно регулировать лишь в сторону уменьшения от номинального значения. Уравнение механической характеристики показывает, что изменение потока приводит к одновременному изменению скорости холостого хода и наклона механической характеристики (рис. 3.3). Механические характеристики,
при различных значениях магнитного потока, пересекаются при некотором значении момента M12. Характеристика 1 соответствует номинальному потоку Φн, а характеристика 2 — ослабленному потоку αΦн, α < 1. Но уменьшение потока Φ одновре-
менно ведет к росту тока якоря Ia2 = M/(CM αΦн) и соответ-
ственно к увеличению потребляемой от сети электрической мощ-
ности UIa2 для создания того же самого момента.
Из анализа характеристик видно, что при Mс < Mкр уменьшение потока приводит к увеличению скорости вращения, а при Mс > M12 — к уменьшению скорости. Верхний предел регулирования скорости вращения ограничивается механической прочностью двигателя и условиями коммутации. Диапазон регулирования Д 2...3. Способ прост в реализации и широко применяется.
36
Необходимо только следить за надежностью электрических соединений в цепи обмотки возбуждения, так как при разрыве этой цепи скорость вращения может достичь опасного значения.
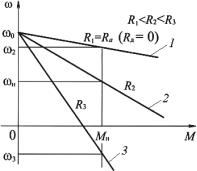
Регулирование скорости изменением добавочного сопротивления в цепи якоря. При увеличении добавочного сопротивления Rд скорость идеального холостого хода ω0 остается неизменной, а изменяется лишь наклон механической характери-
стики Δω — это видно на рис. 3.4, где 1 — естественная, а 2, 3 — искусственные характеристики. Чем больше значение Rд, тем круче характеристика, тем в более широких пределах изменяется скорость двигателя при изменении момента. Очевидно, что этот способ позволяет только уменьшать скорость. При этом значительная часть потребляемой электрической мощности рассеивается в виде теплоты на добавочном резисторе. Поэтому этот способ регулирования неэкономичен. Он применяется в основном для ручной регулировки скорости двигателей небольшой мощности, например в швейных машинах.
Изменение направления вращения. Чтобы изменить направление вращения двигателя, необходимо изменить направление электромагнитного момента Mэм = CM ΦIa, действующего на якорь. Это можно осуществить, как следует из приведенного выражения, путем изменения направления или тока Ia в обмотке якоря, или магнитного потока Φ, т. е. тока возбуждения. Для этого следует переключить провода, подводящие ток к обмотке якоря или к обмотке возбуждения.
3.5. Тормозные режимы работы ДПТ
Электрический двигатель, как правило, используют не только для вращения механизмов, но и для их торможения. Такое торможение позволяет быстро остановить двигатель или уменьшить ско-
37
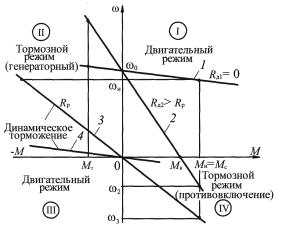
рость вращения ротора двигателя без применения механических тормозов. Возможны следующие виды торможения: генераторное с рекуперацией, т. е. с отдачей выработанной энергии в сеть; динамическое с гашением выработанной энергии в реостате; способом противовключения. Механические характеристики двигателя для его работы в различных режимах показаны на рис. 3.5. Характеристика 1 — естественная, а характеристики 2—4 — искусственные.
Рис. 3.5. Режимы работы двигателя
Участок характеристики ω = f(M) в квадранте I соответствует режиму двигателя. Взаимное направление U, Ia и E в этом режи-
ме показано на рис. 3.1, б, Ia = (U −E)/(Ra +Rд), U = const и |
|||||
|
|
ω |
|
0 |
|
Φ = const. Границы изменения переменных величин: 0 |
|
|
ω |
, |
|
0 E U, Iaк Ia 0, Mк M 0, где Iaк — ток короткого замыкания (пусковой ток), Mк — момент короткого замыкания (пус-
ковой момент).
Генераторное (рекуперативное) торможение может возникнуть в том случае, если на валу двигателя действует активный момент сопротивления, совпадающий по направлению с электромагнитным моментом. Под действием двух моментов скорость двигателя и соответственно ЭДС возрастают, ток двигателя уменьшается. При достижении ω = ω0 ЭДС E = U, а ток Ia = 0, что соответствует режиму идеального холостого хода. Дальнейшее повышение скорости вращения под действием активного момента
38
сопротивления Mс приводит к тому, что скорость ω становится больше ω0, а ЭДС — больше напряжения U. Ток Ia и момент M изменяют знак, и двигатель начинает работать в режиме генератора, создает тормозной момент Mт, противодействуя моменту сопротивления (Mт = Mс) и отдавая энергию в сеть. Этому режиму соответствует участок механической характеристики, расположенный в квадранте II (см. рис. 3.5) при ω > ω0 и M < 0.
В режиме противовключения двигатель вращается под действием активного момента сопротивления в направлении, обратном направлению действия момента, развиваемого двигателем. Такой режим может наблюдаться, например, в подъемном кране при включении резистора с большим сопротивлением Rд в цепь якоря двигателя, опускающего груз. Увеличению сопротивления цепи якоря соответствует искусственная характеристика 2 (см. рис. 3.5) с большой крутизной, при этом нарушается равновесие моментов: M < Mс, начинается электромеханический переходный процесс. Скорость двигателя уменьшается до нуля и затем двигатель изменяет направление вращения, так как момент короткого замыкания Mк для этой характеристики меньше Mс. При этом момент нагрузки и электромагнитный момент двигателя сохраняют свои направления. Изменяется лишь направление вращения двигателя, а следовательно, и направление ЭДС якоря. По отношению к новому направлению вращения двигателя активный момент нагрузки становится крутящим, а электромагнитный момент — тормозным.
Новая установившаяся скорость определяется точкой пересечения искусственной характеристики 2 с характеристикой Mс = const в квадранте IV (см. рис. 3.5). Ток в цепи якоря при работе на участках характеристик в квадранте IV Ia = (U +E)/(Ra + +Rд). К якорю двигателя подводится мощность P1a = UIa, а со
стороны рабочего механизма на вал — мощность P |
= P |
с |
= P |
эм |
= |
2 |
|
|
|
= EIa, и полная мощность расходуется в сопротивлении цепи якоря для обеспечения тормозного режима: UIa +EIa = (Ra +Rд)Ia2.
Динамическое торможение состоит в том, что якорь двигателя независимого (параллельного) возбуждения отключается от сети и замыкается на реостат, обмотка возбуждения остается под напряжением сети. Так как направление вращения остается неизменным под действием кинетической энергии движущихся масс,
39