

С. В. Галкин Кратные интегралы, ряды, поле
.pdf31
Производная скалярного поля по направлению l определяется как
g |
|M limt 0 |
g M tl g(M) |
. Известно из теории функций многих переменных (выпуск V |
|
|
||
l |
t |
||
учебника), что производная по направлению есть проекция градиента на данное направление
|
g |
|M gradg |
l |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|l | |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Пример. Найти производную скалярного поля g(x, y, z) = x2 + y2 + z3 по направлению |
|||||||||||||||||||||||||
{1,3,2} в точке (1,0,4) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
gradg 2x,2y,3z |
2 |
, |
g |
|
1 |
|
|
3 |
|
|
2 |
|
|
|
98 |
|
|
|||||||
|
|
|
|1,0,4 2,0,48 |
|
|
|
, |
|
|
|
, |
|
|
|
|
|
|
|
|
. |
|||||
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
14 |
14 |
14 |
14 |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Векторное поле.
Векторная линия - линия, в каждой точке которой вектор поля направлен по касательной к ней.
Уравнения векторной линии легко получить из условия коллинеарности векторов поля
a(M) P(x, y,z)i Q(x, y,z) j R(x, y,z)k |
|
|
||||||
и касательной dr dxi dy j dzk |
||||||||
|
dx |
|
dy |
|
dz |
. |
|
|
|
|
|
|
|
|
|||
P(x, y,z) Q(x, y,z) R(x, y,z)
Пример. Написать уравнения векторных линий векторного поля a(M) yi x j
dx |
|
dy |
, xdx ydy, |
xdx ydy 0, |
d(x2 y2 ) 0, |
x2 y2 |
C - линии уровня – |
|
|
||||||
y |
x |
|
|
|
|
||
окружности (С>0).
Векторной трубкой называется поверхность, образованная векторными линиями.
Формула Остроградского – Гаусса.
Пусть компоненты векторного поля a(M) P(x, y,z)i Q(x, y,z) j R(x, y,z)k непрерывны и имеют непрерывные частные производные в пространственно односвязной замкнутой области V и на ее кусочно гладкой границе .
Тогда справедлива формула Остроградского – Гаусса
|
|
|
|
|
P |
|
Q |
|
|
R |
|
P(x, y,z)dydz Q(x, y,z)dxdz R(x, y,z)dxdy |
|
|
|
|
|
dv. |
|||||
|
|
|
|
||||||||
|
|
|
x |
|
y |
|
z |
|
|||
|
|
|
V |
|
|
|
|
||||
Заметим, что |
левая часть формулы представляет |
собой |
поток векторного поля |
||||||||
a(M)через поверхность .
Доказательство. 1) Формула Остроградского – Гаусса, в силу произвольности P, Q, R состоит из трех частей, в каждую из которых входит одна из компонент векторного поля P, Q, R. В самом деле, можно взять P = 0, Q = 0 и доказывать отдельно часть формулы в которую входит только R. Остальные части формулы (при P = 0, R = 0, Q = 0, R = 0) доказываются аналогично. Будем доказывать часть формулы
R
R(x, y,z)dxdy z dv
V
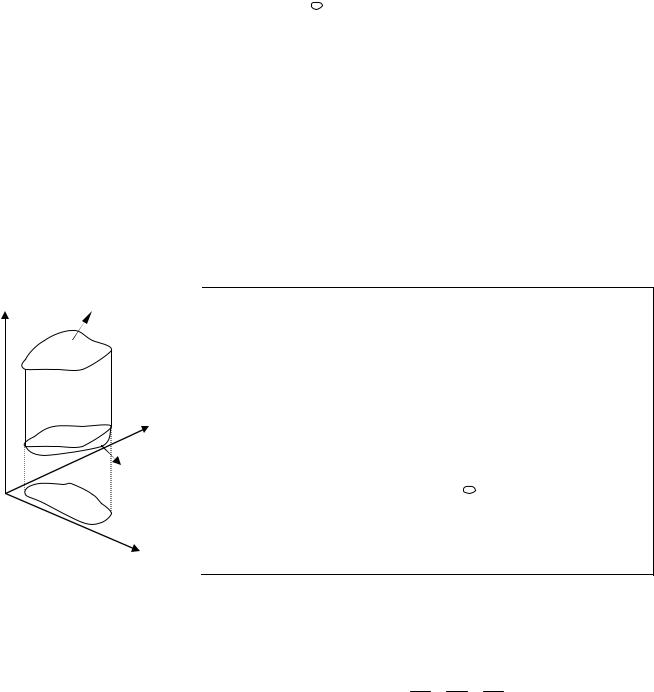
2) Для доказательства выбранной части формулы представим пространственную область V в виде объединения конечного числа цилиндрических тел, не имеющих общих внутренних точек, с образующими, параллельными оси OZ. Доказательство можно
32
проводить для цилиндрического тела. В самом деле, тройной интеграл в правой части равен сумме тройных интегралов по цилиндрическим телам (свойство аддитивности). Поверхностный интеграл в левой части также равен сумме поверхностных интегралов по полным поверхностям цилиндрических тел, причем при суммировании интегралы по общим границам соседних цилиндрических тел будут сокращаться из-за противоположного направления внешних нормалей на общих границах.
|
Итак, будем доказывать соотношение R(x, y,z)dxdy |
R |
dv для цилиндрического |
|||||||
|
|
|||||||||
|
|
|
|
|
|
V |
z |
|
|
|
тела |
V, проектирующегося |
в область D на плоскости OXY. |
Пусть «верхняя» граница |
|||||||
цилиндрического тела – поверхность 1 |
описывается уравнением |
z z1(x, y), «нижняя» |
||||||||
граница – поверхность 2 |
описывается |
уравнением |
z z2 (x, y). |
Боковую |
поверхность |
|||||
цилиндрического тела, параллельную оси OZ, обозначим 3 . |
|
|
|
|
|
|||||
|
Сразу заметим, что поток векторного поля через боковую поверхность равен нулю. |
|||||||||
Действительно, |
R(x, y,z)dxdy R x, y,z cos d 0, |
так |
как |
нормаль |
на боковой |
|||||
|
|
3 |
3 |
|
|
|
|
|
|
|
поверхности ортогональна оси OZ и cos 0. |
|
|
|
|
|
|
||||
|
Заметим также, что на «верхней» поверхности 1 |
cos |
0, а на «нижней поверхности |
|||||||
2 |
cos 0. Поэтому при |
переходе от |
поверхностного |
интеграла по 2 |
к двойному |
|||||
интегралу по области D и обратно надо менять знак, а при переходе от поверхностного |
||||||||||
интеграла по 1 |
к двойному интегралу по области D и обратно менять знак не надо . |
|||||||||
zn1
1
3
 n3
n3
y
2 |
n2 |
|
|
|
D |
|
R |
|
|
z1(x, y) |
R |
|
|
|
R(x, y,z (x, y) dxdy- |
|||
|
dxdydz |
|
|
|
dz dxdy |
|
||||||
|
|
|
|
z |
|
|||||||
z |
|
|
|
1 |
|
|
||||||
V |
D z2 (x, y) |
|
|
|
D |
|
|
|
||||
R(x, y,z2 (x, y) dxdy = |
R(x, y,z)dxdy R(x, y,z)dxdy = |
|||||||||||
D |
|
|
|
1 |
|
|
|
2 |
|
|
||
R(x, y,z)dxdy R(x, y,z)dxdy + R(x, y,z)dxdy = |
|
|
||||||||||
1 |
|
2 |
|
|
|
3 |
|
|
|
|||
R(x, y,z)dxdy |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
Таким образом, |
|
соотношение |
R(x, y,z)dxdy |
R |
dv |
|||||||
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
V |
z |
|
|
|
|
|
|
|
|
|
|
|
|
||
доказано.
x
Замечание. Формулу Остроградского – Гаусса можно записать в «полевом» виде
П (a) div a dv |
- поток векторного поля через замкнутую поверхность равен |
V |
|
объемному интегралу от дивергенции поля по области, ограниченной поверхностью .
Дивергенция векторного поля (расходимость) есть P Q R .
x y z
Дивергенция – это характеристика векторного поля, инвариантная относительно системы координат. Покажем это.

33
Инвариантное определение дивергенции.
Рассмотрим произвольную точку M в пространственной области V. Выберем ее окрестность VM – шар радиуса r с центром в точке M. Обозначим M - ее границу – сферу радиуса r. По теореме о среднем для тройного интеграла
|
|
|
|
|
1 |
|
1 |
|
|
|||
divadv diva(M)VM , |
M VM , |
diva |
M |
|
|
divadv |
|
|
a |
nd |
(по |
|
V |
|
V |
|
|||||||||
VM |
|
|
|
|
M |
VM |
M M |
|
|
|||
|
|
|
|
|
|
|
|
|||||
формуле Остроградского – Гаусса).
Стягиваем окрестность к точке M, получаем дивергенцию векторного поля в точке M.
|
a n d |
|
|
diva(M) limVM M |
M |
. Это и есть инвариантное определение дивергенции. |
|
VM |
|||
|
|
Поэтому дивергенция векторного поля в точке M имеет смысл объемной плотности потока векторного поля через окрестность этой точки и характеризует мощность источника (если diva(M) >0) или стока (если diva(M) <0) векторного поля в точке M.
Если diva(M) >0, то точка M – источник векторного поля, если diva(M) <0, то точка M
– сток векторного поля. Если в некоторой области дивергенция равна нулю, то в этой области нет ни источников, ни стоков, поток векторного поля через границу такой области равен нулю – «сколько поля втекает в область, столько и вытекает из нее».
Пример. Определить расположение источников и стоков |
векторного поля |
a x2 yi xzy j xz2 k . Выяснить, является ли точка M(1,2,3) источником или стоком. |
|
diva 2xy xz 2xz 2xy xz . Все точки, для которых 2xy+xz >0 |
– источники, все |
точки, для которых 2xy+xz <0 – стоки. На поверхности 2xy+xz = 0 нет ни источников, ни стоков. Точка M – источник, так как diva(M) 4 3 7 0.
Свойства дивергенции.
1) Линейность. div 1a1 2a2 1diva1 2diva2
|
|
|
div 1a1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
2a2 div(( 1P1 2P2 )i |
( 1Q1 2Q2 ) j |
( 1R1 2R2 )k) |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
Q |
|
R |
|
|
|
|
P |
|
Q |
2 |
|
R |
2 |
|
|
|||||||
|
|
( 1P1 |
2 P2 ) |
|
|
( 1Q1 2Q2 ) |
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
1 |
|
|
2 |
|
2 |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
x |
|
|
|
|
|
( 1R1 2R2 ) 1 |
x |
y |
z |
|
|
|
x |
y |
z |
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
1diva1 2diva2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
2) |
divC 0, где C cxi cy j czk - постоянное векторное поле. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
c |
x |
|
|
|
cy |
|
c |
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
divC |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
x |
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
3) |
div a diva a grad , где x, y,z - скалярное поле. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( P) |
|
Q |
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
div( a) div( Pi Qj Rk) |
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
y |
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
P |
Q |
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
P |
|
|
Q |
|
|
R |
|
= |
diva |
a grad . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
x |
y |
|
|
|
z |
|
|
|
|
x |
|
|
|
y |
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
34
Соленоидальное поле и его свойства.
Векторное поле a M называется соленоидальным в области V, если в любой точке M
этой области diva(M) 0.
Свойства соленоидального поля.
1)Для того чтобы поле было соленоидальным, необходимо и достаточно, чтобы поток через любую замкнутую поверхность равнялся нулю.
Необходимость следует из формулы Остроградского – Гаусса, достаточность – из инвариантного определения дивергенции.
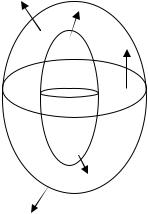
2)Поток соленоидального поля через любую поверхность, окружающую изолированный источник или сток, один и тот же.
1в
P
1н
2в
2н
Рассмотрим две замкнутых поверхности 1 и 2 , окружающие изолированный источник (сток). Будем считать векторное поле соленоидальным в пространственной области между поверхностями. Рассечем поверхности плоскостью P и выберем на ней «верхнюю» сторону плоскости и «нижнюю» сторону, введем на плоскости вектор нормали от «нижней» стороны к «верхней». Плоскость разделяет поверхности на «верхние» и «нижние» части. Обозначим на них направления внешних нормалей к поверхностям.
Рассмотрим две пространственных области. Одна из них лежит выше плоскости и ограничена верхними частями поверхностей и верхней частью плоскости. Вторая ограничена нижними частями поверхностей и нижней частью плоскости.
В той и другой области поле соленоидально. Следовательно,
поток векторного поля через границы этих областей равен нулю.
Пв ПР П 2в П 1в 0,
Пн ПР П 2н П 1н 0.
Складывая эти выражения, получим П 1 П 1в П 1н П 2в П 2н П 2 .
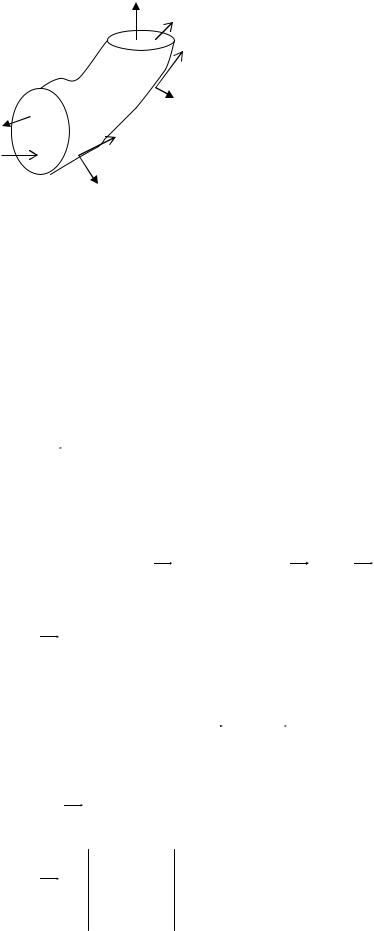
3)Поток соленоидального поля через произвольное сечение векторной трубки один и тот же.
|
|
|
|
|
|
|
|
|
|
35 |
n |
a |
Обозначим Sбок |
–боковую поверхность векторной трубки. На |
|||||||
|
S2 |
боковой поверхности направления нормали и векторного поля |
||||||||
|
ортогональны, |
|
так |
как |
векторная |
трубка образована |
||||
|
|
векторными линиями, а вектор поля направлен по касательной |
||||||||
|
|
к векторной линии. Поэтому поток векторного поля через |
||||||||
|
|
боковую поверхность векторной трубки равен нулю (ПSбок.= 0). |
||||||||
S1 |
|
Учитывая направления нормалей и вектора поля на сечениях |
||||||||
|
векторной |
трубки |
S1 |
и S2, |
а также |
соленодальность поля, |
||||
|
|
получим |
|
|
|
|
|
|
|
|
|
|
ПS ПS |
ПS |
2 |
0, |
ПS ПS |
. |
|
||
|
|
1 |
бок |
|
|
1 |
|
2 |
|
|
Следствие. Векторные линии соленоидального поля не могут начинаться и заканчиваться внутри поля.
В самом деле, иначе конечный поток приходился бы на нулевую площадь источника или стока, что требовало бы бесконечной мощности источника или стока.
Лекция 9 Формула Стокса.
Ротор векторного поля.
Назовем ротором векторного поля a(M) P(x, y,z)i Q(x, y,z) j R(x, y,z)k вектор
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
i |
j |
|
|
|
|
R |
|
Q |
|
|
P |
|
R |
|
|
Q |
|
|
|
P |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
rot a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
j |
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
x |
y |
z |
|
|
|
y |
|
z |
|
|
z |
|
x |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
P |
Q |
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Свойства ротора. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
1) |
Линейность rot( 1a1 2a2 ) 1rota1 |
2 rota2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
k |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
j |
|
|
|
|
|
|
|
|
|
|
|
i |
|
j |
|
|
||||||||
rot( 1a1 2a2 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
+ |
|||||||||||||||||
|
|
|
|
|
|
x |
|
|
|
|
y |
|
|
|
|
z |
|
|
|
x |
|
y |
z |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1P1 2P2 |
1Q1 2Q2 |
1R1 2 R2 |
|
|
|
1P1 |
1Q1 |
1R1 |
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
i |
|
|
|
j |
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= 1rota1 |
2 rota2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
x |
|
|
|
y |
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
2 P2 |
|
Q2 |
2R2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
2) |
rotC 0, |
C- постоянное векторное поле. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
ij k
rotC |
|
|
|
|
|
0 |
x |
|
y |
|
z |
||
|
|
|
|
|||
|
C1 |
C2 |
C3 |
|
||

36
3) rot( a) rota grad a
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
i |
|
|
j |
|
|
|
|
|
|
( R) |
|
|
( Q) |
( P) |
|
( R) |
|
|
( Q) |
|
( P) |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
rot ( a) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
j |
|
|
|
|
k |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
x |
|
y |
|
|
|
z |
|
|
|
|
|
y |
|
|
|
z |
|
|
|
z |
|
x |
|
|
|
x |
|
y |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
P |
Q |
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
R |
Q |
|
|
P |
|
|
R |
|
|
|
Q |
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
j |
|
|
|
|
|
|
|
|
k + |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
y |
|
|
|
|
|
z |
|
|
x |
|
|
|
|
|
|
x |
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
R |
|
|
|
Q |
|
i |
P |
|
|
|
|
R |
|
j |
|
|
|
|
|
|
|
k |
= rota grad a. |
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
y |
|
z |
|
|
|
z |
|
|
|
x |
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
Теорема Стокса.
Пусть пространственно односвязная область V содержит кусочно-гладкую поверхностьс кусочно-гладкой границей .
Пусть компоненты векторного поля a(M) P(x, y,z)i Q(x, y,z) j R(x, y,z)k непрерывны и имеют непрерывные частные производные по своим аргументам до второго порядка включительно в области V.
Тогда справедлива формула Стокса
|
R |
|
Q |
P |
|
R |
|
Q |
|
P |
|
|
||||
|
|
|
|
dydz |
|
|
|
dxdz |
|
|
|
dxdy |
Pdx Qdy Rdz |
|||
|
|
|
|
|
|
|||||||||||
|
y |
|
|
|
z |
|
x |
|
x |
|
|
|
|
|||
|
|
z |
|
|
|
y |
|
|
||||||||
Замечание. Нормаль к поверхности проведена так, чтобы наблюдатель, находясь на конце вектора нормали, видел бы обход контура , совершающимся в положительном направлении (так, чтобы область, границей которой является контур, при обходе контура находилась бы «по левую руку»).
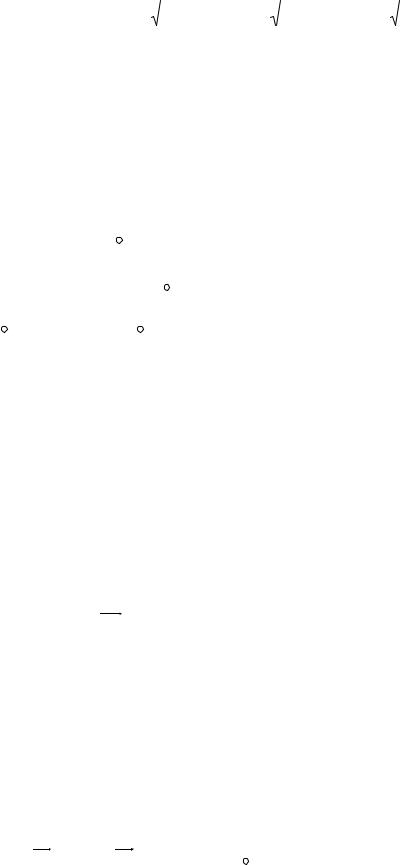
Доказательство теоремы Стокса.
z |
|
|
Как и формула Остроградского – Гаусса, формула Стокса |
||||||||||||
|
состоит из |
трех |
независимых |
частей |
(в |
силу |
|||||||||
|
|
||||||||||||||
|
|
|
произвольности |
компонент |
|
векторного |
поля). |
Докажем |
|||||||
|
|
y |
одну из этих частей, |
остальные формулы доказываются |
|||||||||||
|
|
|
|
|
|
|
P |
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
аналогично. Докажем |
|
|
|
dxdz |
|
dxdy |
|
Pdx - |
||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
z |
|
y |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
D |
|
часть формулы |
Стокса, в |
которой |
содержится |
|
только |
|||||||
компонента P.
Предположим, что поверхность описывается
xуравнением z x, y . Тогда нормаль к поверхности
37
представляет собой вектор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
n cos ,cos ,cos |
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
1 2 |
2 |
1 |
2 |
|
2 |
|
1 2 |
|
2 |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
x |
|
y |
|
|
x |
|
|
y |
|
|
|
|
|
|
|
x |
|
|
y |
|
|
||||
Отсюда видно, что cos |
"y |
cos . Вспомним еще, что d cos dxdz, d cos dxdy. |
||||||||||||||||||||||||||||||||
|
P |
|
P |
|
|
|
|
P |
|
|
|
P |
|
|
|
|
|
|
|
P x, y |
|
|
P |
|
|
|||||||||
|
|
dxdz |
|
dxdy |
|
|
|
|
cos |
|
|
|
|
cos d |
|
|
|
|
|
|
|
|
|
|
|
|
cos d |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
z |
|
y |
|
|
|
z |
|
|
|
y |
|
|
|
|
|
|
|
|
|
z |
|
|
y |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|||||||||||
(на поверхности z x, y , поэтому под интегралом стоит частная производная P по y с учетом зависимости z от y на поверхности )
= |
P |
|
dxdy |
P(x, y, (x, y)) |
dxdy |
|||||||
|
|
|
||||||||||
|
|
|
y |
|
D |
|
y |
|||||
Используем формулу Грина для области D с ее границей . Ее можно записать в виде |
||||||||||||
|
|
Q |
|
|
P |
|
|
|
|
|
|
|
|
|
|
dxdy |
Pdx Qdy . Нам понадобится только та ее часть, которая относится к |
||||||||
|
|
|
||||||||||
|
|
x |
|
|
|
y |
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
функции P |
|
P |
dxdy Pdx. Продолжаем равенство дальше. |
|||||||||
|
||||||||||||
|
|
|
|
|
|
|
D |
y |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
= P(x, y, x, y )dx P(x, y,z)dx . |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
В самом деле, на контуре z x, y , а переменные x, y на том и другом контуре те же, так как контур - это проекция контура на плоскость OXY (параллельно оси OZ). Одна из частей формулы Стокса доказана.
Линейным интегралом векторного поля a по дуге L называется криволинейный
интеграл Pdx Qdy Rdz.
L
Линейный интеграл имеет смысл работы векторного поля при перемещении по дуге.
Циркуляцией векторного поля называется линейный интеграл по замкнутому контуру.
Ц a  Pdx Qdy Rdz .
Pdx Qdy Rdz .
Вводя эти понятия, можно записать формулу Стокса в «полевой» форме
Ц a П rota .
Мы определили ротор векторного поля в декартовой системе координат, однако ротор
– это характеристика самого векторного поля Поэтому необходимо дать определение ротора, которое не зависит от выбора системы координат.
Инвариантное определение ротора.
Рассмотрим произвольную точку M в области V. Проведем через нее поверхность , границей которой служит контур . Пусть поверхность и контур удовлетворяют условиям теоремы Стокса. По теореме о среднем для поверхностного интеграла и формуле Стокса получим
|
|
|
|
rota |
nd |
rota(M) n M Pdx Qdy Rdz . |
|
|
|
38
Здесь, как и ранее - обозначение области и ее площади. Из этого соотношения, стягивая контур к точке M, получим
 Pdx Qdy Rdz
Pdx Qdy Rdz
rota M n M lim M
Это и есть инвариантное определение ротора.
Правая часть формулы – это поверхностная плотность циркуляции векторного поля (энергии в точке M вращения векторного поля или работы векторного поля при вращении вокруг некоторого направления, определяемого вектором n M ). Левая часть – это проекция ротора на это направление.
Если направление n M совпадает с направлением ротора и n M - единичный вектор, то левая часть равна модулю ротора. Поэтому модуль ротора векторного поля равен
максимальному значению поверхностной плотности циркуляции векторного поля.
Левая часть достигает максимума при коллинеарности направления и ротора векторного поля. Поэтому направление ротора векторного поля – это то направление,
вокруг которого поверхностная плотность циркуляции векторного поля – наибольшая.
Пример. Найти ротор линейной скорости вращения с постоянной угловой скоростью
Векторное поле линейной скорости v r .
i |
j |
k |
|
|
|
|
|
|
|
|
|
|||
v x |
y |
z |
|
|
|
|
|
|
||||||
z y y z i x z z x |
j y x x y k , |
|
||||||||||||
x |
y |
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
i |
|
|
j |
|
k |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
rotv |
|
|
|
|
|
|
|
|
|
2 xi |
2 y j 2 zk |
2 |
||
|
x |
|
|
y |
|
z |
||||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
z y y z |
x z z x |
y x x y |
|
|
|
|
|
||||||
Ранее была сформулирована теорема о полном дифференциале для пространственной кривой. В ее доказательстве не хватало только одного пункта – перехода от пункта 3) к пункту 2). Все остальное доказывается аналогично случаю плоской кривой.
Теорема (о полном дифференциале) для пространственной кривой.
Пусть дуга AB лежит на кусочно-гладкой поверхности S, пусть функции P(x, y, z), Q(x, y, z), R(x, y, z) непрерывны и имеют непрерывные частные производные на S. Тогда следующие четыре утверждения эквивалентны.
5) Pdx Qdy Rdzне зависит от формы дуги (от пути интегрирования), а зависит
AB
только от начальной и конечной точек дуги.
6) |
Для любого замкнутого контура S |
Pdx Qdy Rdz 0 |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7) |
|
Q |
|
P |
, |
R |
|
Q |
, |
P |
|
R |
|
x, y,z S |
|
|
|
|
|||
|
x |
|
|
z |
z |
x |
|
|
|
|
|||||||||||
|
|
|
y y |
|
|
|
|
|
|
|
|
|
|
|
|||||||
8) |
|
Pdx Qdy Rdz dV(x, y,z), |
P |
V |
, Q |
V |
, R |
V |
. |
V(x, y,z)- полный |
|||||||||||
|
x |
y |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|||
дифференциал.
39
Теперь переход от пункта 3) к пункту 2) легко сделать по формуле Стокса.
Криволинейный интеграл от полного дифференциала можно вычислять по формуле
x2 , y2 ,z2 |
x2 |
y2 |
z2 |
Pdx Qdy Rdz= |
P x, y1,z1 dx Q x2 , y,z1 dy R x2 , y2 z dz, так как интеграл |
||
x1, y1,z1 |
x1 |
y1 |
z1 |
не зависит от формы дуги (пути интегрирования).
Криволинейный интеграл от полного дифференциала можно вычислять также по формуле Ньютона – Лейбница
x2 |
, y2 ,z2 |
V x2 , y2,z2 V x1, y1,z1 , |
где V x, y,z - потенциал векторного |
|
Pdx Qdy Rdz= |
||
x1 |
, y1,z1 |
|
|
поля (a grad V ).
Потенциальное поле и его свойства.
Векторное поле a(M) называется потенциальным, если существует такое скалярное
поле V(M) (потенциал векторного поля a(M)), что a(M)=grad V(M) .
Замечание. Если поле a(M) - потенциально, то a(M) dr |
= grad V dr dV - полный |
дифференциал. Тогда Pdx Qdy Rdz a dr dV - полный |
дифференциал. Поэтому |
свойства потенциального поля можно сформулировать и доказать как следствия теоремы о полном дифференциале.
Свойства потенциального поля.
1. Линейный интеграл потенциального поля a dr не зависит от формы дуги L = AB,
L
а зависит только от начальной и конечной точек дуги.
В самом деле, a dr= gradV dr dV V(B) V(A).
L L L
2. Циркуляция потенциального поля равна нулю
Полагая дугу АВ замкнутой (A = B), получаем a dr= V(A) V(A) 0
L
3. Потенциальное поле является безвихревым, т.е. rota 0
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
j |
|
|
|
k |
|
rota rot(gradV) |
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
y |
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|||
|
V |
|
|
V |
|
|
V |
|
|||
|
|
x |
|
|
|
y |
|
|
|
z |
|
|
|
2 |
2 |
|
|
|
2 |
2 |
|
|
|
2 |
2 |
|
|||
|
|
V |
|
V |
|
|
|
V |
|
V |
|
|
|
V |
|
V |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
y z |
i |
|
z x |
j |
|
x y |
k 0 |
|||||||||
|
|
|
z y |
|
|
|
x z |
|
|
|
y x |
||||||
Оператор Гамильтона
40
|
|
|
|
|
|
|
|
|
|
||||
Оператор Гамильтона |
|
i |
|
j |
|
k . |
|
|
|
|
|||
|
y |
z |
|
|
|
|
|||||||
x |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
Применим оператор Гамильтона к скалярному полю |
i |
j |
k grad . |
||||||||||
|
y |
|
|||||||||||
|
|
|
|
|
|
|
x |
|
z |
||||
Оператор Гамильтона представляет собой вектор-оператор. Его можно скалярно или векторно умножить на векторное поле a M .
|
P |
|
Q |
|
R |
|
|
i |
|
j |
|
k |
|
a |
|
|
diva, |
a |
|
|
|
|
|
rot a. |
|||
x |
y |
|
x |
|
y |
|
z |
||||||
|
|
|
z |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
P |
|
Q |
|
R |
|
Это дифференциальные операции первого порядка над скалярным и векторным полями. От скалярного поля можно взять градиент, от векторного поля можно взять дивергенцию и ротор.
Дифференциальные операции второго порядка.
В результате дифференциальных операций первого порядка мы получаем скалярные и
векторные поля grad , |
rot a, |
div a . |
К ним вновь можно применить дифференциальные операции первого порядка.
От скалярного поля diva можно взять градиент, получив векторное поле grad diva.
От векторных полей grad , rota можно взять ротор и дивергенцию, получив скалярные поля divgrad , divrota и векторные поля rotgrad , rotrota .
Итак, дифференциальные операции второго порядка позволяют получить скалярные поля divgrad , divrota и векторные поля graddiva , rotgrad , rotrota .
Ранее было показано, что потенциальное поле – безвихревое, т.е. rotgrad =0.
Покажем, что поле ротора – соленоидальное поле, т.е. divrota =0.
Доказательство.
ij k
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
Q |
|
|
P |
|
|
|
R |
|
|
Q |
|
P |
|
|||||||
rot a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
j |
|
|
|
|
k |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
x |
|
|
y |
|
|
z |
|
|
y |
|
|
|
|
|
|
|
z |
|
|
|
x |
|
|
x |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
y |
|
|||||||||||||||
|
|
P |
|
|
Q |
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2R |
|
2Q |
|
2P |
|
2R |
2Q |
|
|
2P |
|
|
|
|
|
|
|
|||||||||||||
divrota |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0. |
|
|
|
|
||||||
x y |
x z |
y z |
|
|
|
z x |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
y x |
|
|
z y |
|
|
|
|
|
||||||||||||||||||||
Три остальных векторных поля связаны друг с другом. Это становится ясным, если рассматривать векторные операции с оператором Гамильтона «набла» аналогично обычным векторным операциям. Однако, эти аналогии не совсем верны, см. подробнее о свойствах оператора «набла» выпуск 7 учебника.
rotgrad = 0, |
divrota = a a 0 |
Известно соотношение a b c b a c c a b . Перенося это правила на действия с
оператором «набла», получим
rotrota a a a( ) graddiva 2a graddiva (divgrad)a .