

3535
.pdfПри определении натяжения во всех точках контура воспользуемся общим правилом: натяжение тягового элемента в каждой последующей по ходу точке контура равно сумме натяжения в предыдущей точке и сопротивления на участке между этими точками (2.49) /20/
Si 1 Si Wi (i 1) , |
(2.49) |
где Si, Si+1 – натяжения в двух соседних точках контура, Н,
Wi – (i+1) – сопротивление на участке между этими точками, Н.
Рис. 2.31. Кинематическая схема конвейера с податливым натяжным устройством:
ПБ приводной барабан; Б барабан холостой ветви; НБ натяжной барабан; КБ концевой барабан
При подробном расчете необходимо выделить следующие участки трассы конвейера: прямолинейные, изгиба и вертикальные.

Сопротивление движению на наклонном прямолинейном участке трассы определяется по формуле
(2.50)
|
W (qГ |
qЛ ) ( h |
l w) , |
(2.50) |
где |
W – сопротивление |
движению на наклонном |
||
прямолинейном участке, Н; |
h – |
разница |
высот |
|
конечных точек участка, м; |
– длина участка. |
|
||
|
В формуле (2.50) знак «плюс» относится к движению |
|||
вверх по наклонному пути, а знак «минус» к движению вниз Натяжение ленты на участках изгиба определим по
формуле (2.51) |
|
|
Si 1 |
Si , |
(2.51) |
где Si, Si+1 – натяжения в двух соседних точках контура, Н, = (1,02-1,06) – коэффициент увеличения натяжения на
участках изгиба, который зависит от угла обхвата барабана. Целесообразно расчет натяжений ленты свести в
таблицу. После необходимо проверить расхождение между значениями натяжений ленты на приводной барабан, рассчитанными по приближенному и подробному тяговому расчету. Если расхождение будет не более 5 – 10 %, то проверочного расчета ленты и электродвигателей не требуется.
Проверяем минимальное натяжение ленты по формулам (2.52) и
(2.53).
SB min Ke (qГ qЛ )  lРВ
lРВ  cos( ) , (2.52)
cos( ) , (2.52)
где SBmin – минимальное натяжение, обуславливаемое допускаемым провесом между роликоопорами на рабочей ветви, Н,
Ке = (8-10)– коэффициент (для конвейеров длиной более 100 м; qГ – линейная сила тяжести насыпного груза, Н/м,
qЛ – линейная сила тяжести ленты, Н/м, |
|
iРВ – расстояние между роликоопорами на рабочей ветви, м. |
|
SH min Ke qЛ lРH cos( ) , |
(2.53) |

где SНmin – минимальное натяжение , обуславливаемое допускаемым провесом между роликоопорами на холостой ветви, Н,
iРН – расстояние между роликоопорами на холостой ветви, м. Рассчитанные значения сравниваются с минимальным
натяжением ленты на рабочей и холостой ветвях. Если минимальные натяжения ленты больше требуемых минимальных натяжений, то пересчета натяжений не требуется.
На основании проведенных расчетов строят диаграмму натяжений резинотросовой ленты для летнего и зимнего времени. Как правило, конвейерная лента испытывает большее натяжение в зимнее время. Это связано с физико-химическими свойствами самой ленты, которые изменяются в зависимости от климатических условий окружающей среды.
Расчет дополнительных усилий при пуске конвейера
При пуске конвейера, кроме крутящего момента, необходимого для преодоления статических сопротивлений движению ленты, к приводным барабанам необходимо приложить дополнительный момент для преодоления инерции вращающихся и движущихся поступательно масс конвейера и разгона их до заданной скорости. Расчет дополнительных усилий при пуске конвейера целесообразно производить по методике, описанной в литературе /20/.
Динамический момент, приведенный к валу двигателя, находится по формуле (2.54)
М Д |
J |
, |
(2.54) |
где МД – динамический момент, Н м , |
|
||
J – момент инерции |
всех |
вращающихся |
и поступательно |
движущихся масс, приведенный к валу двигателя, кг  м2 ,
м2 ,
e– угловое ускорение вращения двигателя при пуске, рад/с2,
w , tП
где w – угловая частота вращения вала двигателя, рад/с. tп – время пуска конвейера, с,
Приведенный к валу двигателя момент инерции состоит из момента инерции вращающихся элементов привода Jпр и момента инерции поступательно движущихся масс конвейера (включая массу вращающихся частей роликов) Jпост
J |
Jпр |
Jпост , |
(2.55) |
Jпр |
Kпр |
J p , |
(2.56) |
где Jр – момент инерции ротора двигателя, кг |
м2 , |
||
Кпр =(1,15-1,25) – коэффициент, учитывающий момент инерции остальных элементов привода, вращающихся медленнее, чем вал двигателя (редуктор и приводной барабан вместе с муфтой).
Момент инерции поступательно движущихся масс находится по формуле (2.57).
|
m R 2 |
|
|
|
Jпост |
б |
, |
(2.57) |
|
i2 |
||||
|
|
|
где m – масса поступательно движущихся частей конвейера, а также масса вращающихся частей всех роликов и барабанов (кроме приводных), кг,
Rб – радиус приводного барабана, м,
–КПД привода,
i– передаточное отношение редуктора.
Момент сопротивления на валу двигателей приводной станции при известном передаточном отношении редуктора определяется как
MCT |
W D |
|
, |
(2.58) |
|
|
|||
2 ip |
|
|||
|
p |
|
||
где W – сопротивление движению, Н,
D –диаметр приводного барабана, м, ip– передаточное отношение редуктора,
р– К.П.Д. редуктора.
Пусковой момент складывается из статического момента Mcт, необходимого для преодоления сопротивления движению ленты с грузом при нормальной работе конвейера, и динамического Мд.
M ПС MCТ М Д , |
(2.59) |
Минимальное время пуска находится по формуле (2.60).
t |
|
J |
w |
|
|
П |
|
|
, |
(2.60) |
|
M |
|
||||
|
|
Д |
|
||

где МД – динамический момент, Н  м ,
м ,
J – момент инерции всех вращающихся и поступательно
движущихся масс, приведенный к валу двигателя, кг  м2 , tП – время пуска конвейера, с,
м2 , tП – время пуска конвейера, с,
w – угловая частота вращения вала двигателя, рад/с.
Во время пуска конвейера в ленте происходят волновые процессы. При приложении к ленте силового импульса от привода вдоль ее ветви распространяется волна деформации. При этом избыточное динамическое усилие в ленте в точке набегания ее на приводной барабан определяется по формуле (2.61)
|
|
|
|
SД |
WД (1 |
1 |
), |
(2.61) |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
eA |
|
||
где |
W |
|
M Д |
i – избыточное динамическое окружное усилие, |
|||||
Д |
Rб |
||||||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
передаваемое ленте от привода в пусковой период, Н; А – показатель степени, зависящий от скорости и времени
распространения упругой волны и отношения масс поступательно движущихся и вращающихся частей конвейера.
После преобразований этот показатель может быть
выражен в виде
A |
Jпост |
(1 |
|
qП |
|
) , |
(2.62) |
|
|
||||||
|
Jпр |
qгр |
|
||||
где qп , qгр – веса на 1м длины конвейера поступательно движущихся частей конвейера, включая веса вращающихся частей роликов порожняковой и грузовой ветвей конвейера, Н/м.
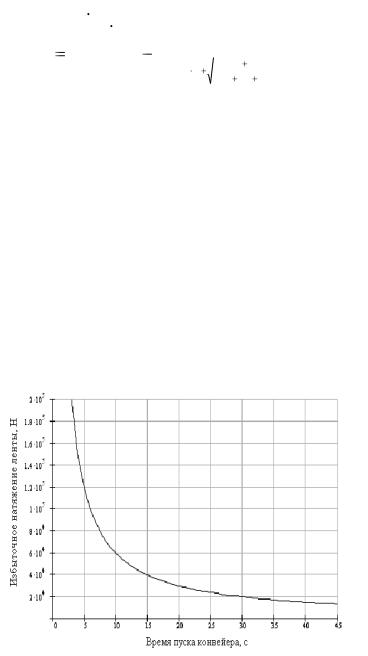
Избыточное динамическое усилие в ленте по формуле (2.61) может достигать величины, превосходящей натяжения в точке набегания на приводной барабан в статическом режиме работы, что при пуске лента будет испытывать большие нагрузки. Формулу (2.61) можно представить в преобразованном виде
|
|
J w |
i |
|
|
|
|
|
|
|
|
|
|||
|
|
t П |
|
|
|
1 |
|
|
|
|
|||||
S |
|
|
|
(1 |
|
|
|
|
|
) , |
(2.63) |
||||
Д |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
R |
|
|
|
|
J пост |
(1 |
|
|
qРН |
q Л |
|
||
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
e |
J пр |
|
|
qРН |
q Л q Г |
|
||||
|
|
|
|
|
|
|
|
|
|||||||
позволяющим получить зависимость избыточного динамического усилия в ленте от времени пуска. В качестве примера на рис. 2.32 приведена такая зависимость для конвейера длиной 1010 м.
Полученная зависимость показывает, что одним из способов снижения динамических нагрузок является увеличение времени запуска конвейера, поскольку увеличение времени пуска приводит к снижению избыточного натяжения ленты.
Волновые процессы, возникающие в ленте при пуске конвейера
Перегрузка ленты при пуске или торможении конвейера может привести к опасному снижению запаса прочности лен-
Рис. 2.32. Зависимость избыточного динамического натяжения от времени пуска конвейера
ты, если прочность еѐ выбрана без учета характеристик применяемого привода конвейера или его тормозного устройства. Применение современных и дорогостоящих систем привода, обеспечивающих плавность пуска, уменьшает динамическое натяжение ленты, повышая безопасность эксплуатации ленты и срок ее службы. Кроме того, оказывается возможным применить на конвейере ленту с меньшей продольной прочностью.
Волновые процессы, возникающие в ленте при пуске и торможении конвейера, существенно увеличивают динамические нагрузки. Важнейшим параметром волнового процесса является скорость распространения продольной упругой волны /20/.
Основные затруднения при расчете скорости распространения волн в конвейерной ленте связаны со следующими основными факторами:
-продольная жесткость конвейерной ленты определяется не только продольными упругими деформациями, но также формой и величиной провеса между роликоопорами, и нелинейно зависит от натяжения ленты;
-лента обладает значительным внутренним трением, является упруговязким телом и еѐ механические свойства зависят от скорости нагружения. Продольная жесткость ленты при прохождении упругих волн определяется также крутизной фронта волн; скорость волны в общем случае определяется не только упругими, но и вязкими характеристиками ленты, а их значения, как правило, известны весьма приближенно;
-при вовлечении в движение неподвижной ленты часть энергии прямой пусковой волны расходуется на преодоление сил трения в роликоопорах. В результате чего скорость распространения прямой волны снижается, и ее величина определяется предпусковой диаграммой натяжения контура ленты и постоянно изменяющимся ускорением на фронте волны.
Условная продольная жесткость ленты, связанная с выбором провеса, определяется по формуле (2.64) /20/
EПР |
|
|
12 S 3 |
|
|
, |
(2.64) |
||
|
|
|
|
|
|
|
|||
(q |
|
q |
|
)2 |
l |
2 |
|||
|
|
Л |
|
ГР |
|
|
РВ |
|
|
где Eпр –условная продольная жесткость ленты,
S – натяжение ленты, Н,
qГ – линейная сила тяжести насыпного груза, Н/м, qЛ – линейная сила тяжести ленты, Н/м,
iРВ – расстояние между роликоопорами ветви, м.
Условная продольная жесткость ленты находится для рабочей холостой ветвей.
Агрегатная жесткость ленты рассчитывается по (2.65)
Eа |
|
|
E |
|
|
|
, |
(2.65) |
|
|
|
|
|
|
|
|
|||
1 |
(qЛ qГР |
2 ) lРВ |
3 |
EПР |
|
||||
|
12 S 3 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
где E = k·Eт ·F – жесткость тросовой ленты, Н/м;
k = 0,75 – коэффициент, учитывающий неравномерную вытяжку тросов;
Ет = 0,8 1010 – модуль упругости тросов на растяжение, Н/м,
F – суммарная площадь сечения тросов, м2;
Eпр –условная продольная жесткость ленты, Н/м.
Скорость распространения волны в ленте, отождествленной с однородным абсолютно упругим стержнем, без учета потерь энергии на изменение сил внешнего трения определится по (2.66).
С 
 Еa ,
Еa ,
где Eа – агррегатная жесткость ленты, Н/м,
– приведенная масса тягового органа, кг.
Приведенную массу тягового органа найдем по формуле
qГ qЛ |
qP |
|
|
|
. |
g |
|
|
|
|
|
(2.66)
(2.67)
По формуле (2.67) определяют приведенную массу тягового органа для рабочей и холостой ветви и скорость распространения упругой волны в ленте для обеих ветвей конвейера.
Анализируя формулы (2.64), (2.65), (2.66) можно сделать вывод, что скорость распространения волны в ленте зависит от загрузки конвейера и натяжения тягового органа. Выведем зависимость скорости распространения волны в ленте ее от натяжения с помощью формул
(2.65), (2.66), (2.67).

Скорость волны нелинейно зависит от натяжения и параметров роликового става. На рис. 2.33 представлены графики зависимостей скоростей распространения волны в зависимости от натяжения ленты ранее рассмотренного конвейера, из которого следует, что предварительное натяжение ленты во всех точках контура не должно падать ниже 33300 Н при пуске
|
|
|
|
|
|
k E Т |
F |
|
|
|
|
|
|
1 |
(q |
Л |
qГР 2 ) lРВ 3 |
EПР |
|
|
|||||||
|
|
12 S 3 |
, |
(2.68) |
|||||||||
c (S ) |
|
|
|
|
|||||||||
|
|
qЛ |
qГР |
q р |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
g
без груза и не менее 66000 Н при пуске загруженного конвейера. Из рис. 2.33 также видно, что натяжение контура ленты,
Рис. 2.33. Зависимости скорости распространения волны от натяжения ленты
создаваемое натяжным устройством в переходных режимах не должны падать ниже уровня, при котором происходит резкое снижение скорости

распространения волн (S=33300 Н), что приводит к потере устойчивости движения ленты.
По зависимостям, аналогичным приведенным на рис. 2.33, можно определить скорости распространения волны для обеих ветвей при пуске без загрузки. Например, для приведенных графиков:
с1 = 26 м/с – скорость распространения волны на рабочей ветви,
с2 = 73,9 м/с – скорость распространения волны на порожней ветви.
При податливом натяжном устройстве (Sсб = const), установленном у привода, после приложения к приводному барабану избыточного момента по грузовой ветви ленты будет
распространяться упругая волна растяжения. Деформации растяжения ленты компенсируются податливым натяжным устройством. Достигнув границы грузовой и порожняковой ветвей, волна растяжения частично преломится и перейдет на порожняковую ветвь, а частично отразиться и ее фронт будет распространяться по грузовой ветви к точке набегания. Преломленная волна, направляясь по порожняковой ветви, достигнет натяжного устройства и, отразившись от него, начнет распространяться в противоположном направлении. Таким образом, упругая волна в ленте демпфируется через время (с)
t , 2 ( |
L |
|
L |
) , |
(2.69) |
|
|
||||
|
c1 |
|
c2 |
|
|
где L – длина конвейера, м.
Таким образом, расчет волновых процессов в ленте показывает, что скорость распространения упругой волны в ленте зависит как от