

Элементы систем автоматики
..pdfРис. 21. Схема жидкостного (а) и трубчатого (б) датчиков давления
нальна этой разности давлений. Изменение уровня жидкости в расширенной части сосуда замеряется перемещением движка потенциометра, связанного через шток с поплавком.
2.10.2. Трубчатый манометр
Трубчатый манометр, представленный на рис. 21, б, предназна- чен для замера только абсолютного давления. Состоит этот датчик из изогнутой трубки 1, один конец которой жестко закреплен, а другой его конец свободный. Свободный конец изогнутой части трубки соединяется с движком потенциометра. Во внутреннюю полость трубки подается измеряемое давление Ð.
Принцип работы трубчатого манометра. Этот датчик замеряет абсолютное давление. Под действием этого давления, подаваемого во внутреннюю полость трубки, изогнутая часть трубки упруго распрямляется, при этом ее свободный конец перемещает движок потенциометра, изменяя значение выходного сигнала.
2.10.3. Сильфонный датчик давления
Сильфонный датчик давления (рис. 22, а) состоит из герметич- ного стакана 1, во внутреннюю полость которого помещается гофрированный сильфон 2, внутренняя полость которого соединена с источником повышенного давления Ð1. Внутренняя полость стакана соединена с источником пониженного давления Ð2. Один из торцов сильфона жестко закреплен, а другой свободный торец соединен с движком потенциометра 3.
31
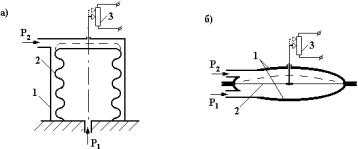
Рис. 22. Схема сильфонного (а) и мембранного (б) датчиков давления
Принцип работы сильфонного датчика давления. Данный дат- чик замеряет относительное давление. При воздействии разности давлений Ð1 è Ð2, подаваемых во внутренние полости сильфона и стакана, свободный торец сильфона деформирует в осевом направлении. При этом перемещение свободного торца передается че- рез шток движку потенциометра, формирующему величину выходного сигнала этого датчика.
2.10.4. Мембранный датчик давления
Мембранный датчик давления, представленный на рис. 22, б, состоит из корпуса 1, между половинами которого помещена мембрана 2, связанная через шток с движком потенциометра 3. В нижнюю половину корпуса (под мембрану) подается повышенное давление Ð1, а в его верхнюю половину подается пониженное давление Ð2.
Принцип работы мембранного датчика давления. Этот датчик замеряет относительное давление. При воздействии разности давлений Ð1 è Ð2, подаваемых в верхнюю и нижнюю внутренние полости корпуса датчика, его мембрана прогибается в сторону пониженного давления. Этот прогиб мембраны через шток перемещает движок потенциометра, формируя значение выходного сигнала этого датчика.
2.11. Расходомеры
Расходомеры предназначены для замера расхода жидкости или газа. Расходомеры бывают следующих типов: разностные, турбинные и вибрационные.
32
2.11.1. Разностный расходомер
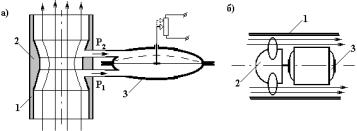
Разностный расходомер представлен на рис. 23, а. Он состоит из трубы 1, по внутренней полости которой перемещается измеряемый агент; конфузора 2 (зауженный участок трубы), который сужает поток измеряемого агента; дифференциального датчика давления 3, замеряющего разность давлений.
Рис. 23. Схема разностного (а) и турбинного (б) датчиков расхода
Принцип работы разностного расходомера. При прохождении измеряемого потока (жидкости или газа) через конфузор происходит его сужение, в результате чего на входе и выходе появляется разность давлений Ð1 è Ð2, пропорциональная расходу агента:
Q K·(P1 – P2), |
(10) |
ãäå Ð1 — давление на входе потока; Ð2 — давление на выходе потока;
K — коэффициент пропорциональности, зависящий от свойств (параметров) конфузора.
2.11.2. Турбинный расходомер
Турбинный расходомер представлен на рис. 23, б. Он состоит из трубы 1, по внутренней полости которой перемещается измеряемый агент; турбины 2 и тахогенератора 3.
Принцип работы турбинного расходомера. При прохождении измеряемого потока (жидкости или газа) через внутреннюю полость трубы линейная скорость перемещения потока превращается в угловую скорость вращения турбины, которая посажена на одном валу с тахо-
33

генератором. Расход потока измеряемого агента, проходящего через трубу,
Q k·S·V, |
(11) |
ãäå S — площадь поперечного сечения трубы; V — линейная скорость потока;
k — коэффициент пропорциональности, зависящий от сопротивления трубы.
Линейная скорость потока связана с угловой скоростью турбины следующим выражением:
V k1· , |
(12) |
ãäå k 1 — коэффициент пропорциональности между линейной скоростью и угловой, зависящий от параметров турбины;
— угловая скорость вращения турбины.
Ñучетом уравнения 12 величина расхода потока определяется зависимостью:
Q k·k1· ·S. |
(13) |
Вместо тахогенератора в этом датчике может быть использовано зубчатое колесо 3 (рис 24, а), связанное с турбиной 2, которое враща-
Рис. 24. Схема импульсного (а) и вибрационного (б) датчиков расхода
ется совместно с этой турбиной. При вращении зубья этого колеса, проходя мимо сердечника магнитоиндукционного датчика 4, формируют импульсы, частота которых пропорциональна расходу агента.
2.11.3. Вибрационный расходомер
Вибрационный расходомер (рис. 24, б) состоит из жестко закрепленной трубки 1 с утолщенным свободным концом, во внут-
34

ренней полости которой циркулирует измеряемый агент, генератора поперечных колебаний 2 трубки и приемника этих колебаний 3.
Принцип работы вибрационного расходомера основан на измерении разности частот поперечных колебаний трубки.
Рассмотрим колебания трубки при отсутствии потока измеряемого агента. Наибольшая амплитуда колебаний свободного конца этой трубки наблюдается в том случае, если их частота приближается к собственной частоте fc поперечных колебаний свободного конца этой трубки, которая определяется по формуле:
f |
|
|
c |
, |
(14) |
c |
|
||||
|
|
m |
|
||
|
|
|
|
||
ãäå ñ — поперечная жесткость трубки;
m — масса свободного утолщенного конца трубки.
При наличии потока агента во внутренней полости трубки его масса участвует в совместном поперечном колебании с этой трубкой. Чем больше скорость (расход) этого потока, тем больше масса агента, участвующего в поперечных колебаниях трубки. Поэтому с увеличением расхода частота поперечных колебаний этой системы уменьшается в соответствии с формулой:
f |
c |
(15) |
, |
 m ma
m ma
ãäå ma — масса агента, участвующего в колебании.
Приемник колебаний 3 замеряет разность частот fc – f. Оконча- тельный расход измеряемого агента подсчитывается по формуле:
Q k f c f |
(16) |
ãäå k — коэффициент пропорциональности, зависящий от параметров приемника колебаний.
2.12. Релейные элементы систем автоматики
Реле — это элементы автоматики, предназначенные для управления силовыми цепями или силовыми магистралями исполнительных устройств.
35

2.12.1. Характеристика релейного элемента автоматики
Релейным элементом называется такой элемент автоматики, выходной сигнал которого переходит скачкообразно с одного уровня на другой при непрерывном изменении входного сигнала.
Рис. 25. Выходная (а) и нагрузочная (б) характеристики электромагнитного реле
Рассмотрим характер изменения выходного сигнала ó (рис. 25) для электронного реле при непрерывном изменении величины его входного сигнала õ. При изменении величины входного сигнала от нуля до значения Õñ (срабатывания) выходной сигнал ó остается на нижнем (нулевом) уровне. При достижении этим сигналом значе- ния Õñ выходной сигнал скачкообразно переходит на высокий уровень и остается постоянным на этом уровне при неограниченном увеличении величины входного сигнала.
При обратном уменьшении значения входного сигнала выходной сигнал будет находиться на верхнем уровне даже тогда, когда его значение сравняется с величиной Õñ. На нижний уровень выходной сигнал перейдет только тогда, когда входной сигнал достигнет значения Õ0 (отпускания). Таким образом, в релейной характеристике наблюдается зона неоднозначности, т. е. зона, в которой выходной параметр может занимать одно из двух возможных положений (верхнее или нижнее).
2.12.2.Разновидности реле
Âзависимости от вида энергии силовых магистралей и вида энергии сигнала управления, различают реле: электромагнитные, электрогидравлические, пневматические и механические.
Электромагнитные реле бывают двух типов: постоянного тока
èпеременного тока.
36

Электромагнитные реле постоянного тока делятся на нейтральные и поляризованные.
Нейтральным электромагнитное реле называют потому, что его работа не зависит от полярности сигнала управления постоянного тока. Схема реле этого типа представлена на рис. 26, а. Нейтральное электромагнитное реле состоит из сердечника 1, выполненного из магнитного материала, рабочей катушки управления 2, якоря 3, возвратной пружины 4 и группы контактов управления 5.
Рис. 26. Схема нейтрального (а) и поляризованного (б) электромагнитного реле постоянного тока
Принцип работы нейтрального электромагнитного реле постоянного тока. При подаче сигнала управления любой полярности на катушку 2, эта катушка создает магнитный поток, который концентрируется в сердечнике 1. Магнитный поток создает силу притяжения якоря. При воздействии этой силы якорь, преодолевая сопротивления пружины 4, притягивается к сердечнику, уменьшая зазор между ними до нуля. В результате притяжения якоря происходит переключение контактов управления. Часть этих контактов замыкается, другая — размыкается. Те контакты, которые замыкаются при срабатывании реле, называются нормально-разомкнутыми, и наоборот, контакты, которые при срабатывании реле размыкаются, называются нормально-замкнутыми.
При снятии сигнала управления магнитный поток в сердечнике быстро исчезает, поэтому исчезает и сила притяжения к нему якоря, вследствии чего якорь возвратной пружиной возвращается в исходное положение. При этом нормально-замкнутые контакты замыкаются, а нормально-разомкнутые размыкаются.
37
Нагрузочная характеристика нейтрального электромагнитного реле представлена на рис. 25, б. На якорь этого реле действуют две силы: нелинейная сила магнитного притяжения и линейная сила упругости возвратной пружины. Для нормальной работы реле работа, совершаемая магнитной силой притяжения якоря, должна быть выше работы упругой силы возвратной пружины. С другой стороны, уменьшение работы возвратной пружины приводит к процессу затягивания по времени размыкания контактов управления, что вызывает усиление процесса их искрения, а следовательно, увеличение их износа.
Поляризованное реле постоянного тока. В отличии от нейтрального реле работа поляризованного реле зависит от полярности сигнала управление постоянного тока. Схема этого реле представлена на рис. 26, б. Поляризованные реле используются как переключатель и состоят из Ш-образного магнитопровода, на перефирийных стержнях которого установлены полюса постоянного магнита N и S. На среднем стержне магнитопровода помещается катушка управления. К торцевой части среднего стержня магнитопровода шарнирно крепится якорь, который управляет положением силовых контактов.
Принцип работы поляризованного реле постоянного тока. При отсутствии сигнала управления якорь реле находится в среднем, нейтральном положении и на равном удалении от полюсов постоянного магнита, которые одинаково воздействуют на этот якорь. При таком положении якоря реле силовые контакты находятся в разомкнутом состоянии.
При подаче сигнала управления определенной полярности в катушке управления возбуждается постоянный магнитный поток, который складывается алгебраически с магнитным потоком постоянных магнитов. При этом один из полюсов постоянного магнита усиливается по магнитному потоку за счет их согласованности, а другой ослабляется за счет встречности этих потоков. К усиленному полюсу постоянного магнита притягивается якорь реле, при замыкании которого одна из пар силовых контактов тоже замыкается.
При смене полярности сигнала управления меняется направление магнитного потока катушки управления и соответственно меняется направление этого потока и в магнитопроводе. При этом усиливается магнитный поток противоположного полюса постоянного
38

магнита и ослабляется другой, первоначально усиленный. Поэтому якорь притягивается к противоположному полюсу, что приводит к переключению силовых контактов.
Таким образом, поляризованное реле работает как переключа- тель. Направление включения его контактов зависит от полярности сигнала управления.
Электромагнитные реле переменного тока. Несмотря на то, что работа нейтрального реле не зависит от полярности сигнала управления при подаче в его катушку сигнала управления в виде переменного тока, на якорь этого реле будет воздействовать переменная по величине магнитная сила притяжения. В момент смены полярности такого сигнала управления эта сила будет равна нулю (кривая 1 рис. 27, б). В результате этого пружина возврата будет на это время размыкать силовые контакты, что приведет их к постоянной вибрации и быстрому разрушению. Для того чтобы избежать режима вибрации контактов, необходимо в момент перемены полярности сигнала управления удержать якорь этого реле в замкнутом состоянии, что достигается возбуждением дополнительного (вторичного) магнитного потока, смещенного по фазе (по времени) от основного. Этот поток создает магнитную силу, удерживающую якорь в замкнутом состоянии в момент смены полярности сигнала управления (кривая 2 рис. 27, б).
Рис. 27. Схема электромагнитного реле переменного тока
Дополнительный магнитный поток создается основным магнитным потоком в сердечнике 1 за счет вихревых токов в короткозамкнутом витке 4, охватывающем этот сердечник. Так как угол фазового сдвига между основным и дополнительным магнитными
39
потоками должен быть 90°, то в момент смены полярности сигнала управления дополнительный магнитный поток будет только удерживать якорь в замкнутом состоянии, но не сможет его замкнуть.
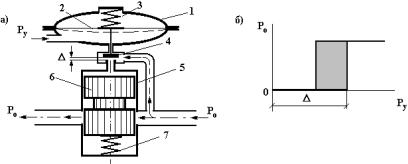
Пневматические реле. В том случае, когда природа сигнала управления и сигнала управляющего воздействия представлена энергией сжатого воздуха или иного газа, то релейным элементом в системах управления может быть пневматическое реле. Схема пневматического реле представлена на рис. 28.
Рис. 28. Схема пневматического реле
Пневматическое реле состоит из мембранной коробки 1, между двумя половинами которой помещается мембрана 2. Нижняя полость этой коробки связана с источником сигнала управления Ðó, а в верхней его половине помещается пружина 3. Мембрана 2 через шток жестко соединена с клапаном 4, который пружиной 3 прижимается к своему седлу, перекрывая поступление сжатого воздуха в торцевую полость золотниковой коробки 5. Во внутренней полости этой коробки помещен золотник 6, который пружиной 7 поджимается в верхнее положение, перекрывая при этом свободный проход через золотник давления сжатого воздуха Ðî.
Принцип работы пневматического реле. При подаче сигнала управления Ðó в нижнюю полость мембранной коробки 1 мембрана 2 прогибается, сжимая пружину 3, при этом шток перемещает клапан 4 вверх. В образовавшийся зазор давление сжатого воздуха Ðî устремляется в торцевую полость золотниковой коробки 5, перемещая золотник 6 вниз. При таком перемещении сжимается пружина 7, а
40