

7 3. Уравновешивание плоских механизмов
7.3.1. Метод заменяющих масс
Даже
при равномерном вращении главного вала
машины часто возникает динамическое
воздействие её на основание
![]() и
и![]() .
Механизм, который оказывает на основание
динамическое воздействие в виде силы
.
Механизм, который оказывает на основание
динамическое воздействие в виде силы![]() ,
называется статически неуравновешенным.
Снижение этого динамического усилия
,
называется статически неуравновешенным.
Снижение этого динамического усилия![]() до допустимого уровня или сведение его
к нулю называется статическим
уравновешиванием. Но даже в последнем
случае
до допустимого уровня или сведение его
к нулю называется статическим
уравновешиванием. Но даже в последнем
случае![]() на основание машины может воздействовать
переменный момент
на основание машины может воздействовать
переменный момент![]() .
.
Главный
вектор
![]() численно равен сумме главных векторов
сил инерции подвижных звеньев механизма
численно равен сумме главных векторов
сил инерции подвижных звеньев механизма![]()
Выполнение
условия
![]() возможно лишь тогда, когда центр масс
механизма не перемещается при его
движении. Этого стараются достигнуть,
размещая на подвижных звеньях механизма
дополнительные корректирующие массы,
часто называемые противовесами. Выполнить
расчёт на статическое уравновешивание
механизма можно, используя метод
заменяющих масс, которые вводятся в
расчёт вместо распределенных по звену
реальных масс. В механике за эквивалентную
динамическую систему распределённых
масс звена принята точечная массаm2
(рисунок
7.4),
помещенная в центр масс S2
звена
2, и момент инерции масс относительно
этого центра. Метод заменяющих масс
предполагает замену реально распределенных
по звену масс двумя сосредоточенными
в шарнирах массами. Рассмотрим пример
четырех – шарнирного механизма масса
которого
возможно лишь тогда, когда центр масс
механизма не перемещается при его
движении. Этого стараются достигнуть,
размещая на подвижных звеньях механизма
дополнительные корректирующие массы,
часто называемые противовесами. Выполнить
расчёт на статическое уравновешивание
механизма можно, используя метод
заменяющих масс, которые вводятся в
расчёт вместо распределенных по звену
реальных масс. В механике за эквивалентную
динамическую систему распределённых
масс звена принята точечная массаm2
(рисунок
7.4),
помещенная в центр масс S2
звена
2, и момент инерции масс относительно
этого центра. Метод заменяющих масс
предполагает замену реально распределенных
по звену масс двумя сосредоточенными
в шарнирах массами. Рассмотрим пример
четырех – шарнирного механизма масса
которого
![]()
заменяется
двумя массами
![]() и
и![]() ,
сосредоточенных в шарнирах
,
сосредоточенных в шарнирах![]() и
и![]() .
.

Рисунок 7.4.
Поставим условие «сохранения массы» в виде уравнения
![]()
Такая
«двухмассовая» система не всегда будет
эквивалентна реальному звену. Чтобы
добиться большего подобия реального и
звена с заменяющими массами, поставим
условие «сохранения центра масс», т.е.
расположения общего центра двух
заменяющих масс
![]() и
и![]() в точке реального центра масс
в точке реального центра масс
![]()
Значения заменяющих масс могут быть получены из совместного решения уравнений «сохранения массы» и «сохранения центра масс»
 ;
;
 .
.
Полной
эквивалентности расчётной двухмассной
и реальной систем все же мы не сможем
добиться, т.к. момент инерции двух
заменяющих масс
![]() и
и![]() относительно центра масс
относительно центра масс![]() не совпадает со значениями момента
инерции, распределенных по шатуну масс.
не совпадает со значениями момента
инерции, распределенных по шатуну масс.
Таким
образом, при замене реального звена
двумя сосредоточенными в шарнирах
заменяющими массами, главный вектор
сил инерции реального звена
![]() будет равен главному вектору сил инерции
заменяющих масс
будет равен главному вектору сил инерции
заменяющих масс
![]() ,
,
где
![]() ,
,![]() – ускорения точек
– ускорения точек![]() и
и![]() .
Но главный момент сил инерции замещающих
масс
.
Но главный момент сил инерции замещающих
масс![]() и
и![]() не будет равен главному моменту
не будет равен главному моменту![]() реального звена. Принятая двухмассная
расчетная схема звена не будет вполне
эквивалентна реальной системе, но она
позволит достаточно просто произвести
статическое уравновешивание механизма,
размещая противовесы на двух звеньях,
совершающих вращательное движение
(рисунок7.4).
реального звена. Принятая двухмассная
расчетная схема звена не будет вполне
эквивалентна реальной системе, но она
позволит достаточно просто произвести
статическое уравновешивание механизма,
размещая противовесы на двух звеньях,
совершающих вращательное движение
(рисунок7.4).
7.3.2. Статическое уравновешивание механизма с поступательно двигающимися массами
Из
рассмотрения предыдущего примера мы
видим, что достаточно просто происходит
уравновешивание вращающихся масс. Так
как при статическом уравновешивании
выполняется условие
![]() ,
то замена реального звена двумя
заменяющими массами является вполне
допустимой, а полное уравновешивание
четырех – шарнирного механизма (рисунок7.4)
может быть произведено с помощью двух
корректирующих масс, расположенных на
вращающихся звеньях 1
и 3
,
то замена реального звена двумя
заменяющими массами является вполне
допустимой, а полное уравновешивание
четырех – шарнирного механизма (рисунок7.4)
может быть произведено с помощью двух
корректирующих масс, расположенных на
вращающихся звеньях 1
и 3
 ,
,
 ,
,
где
![]() ,
,![]() – массы звеньев1
и 3;
– массы звеньев1
и 3;
![]() ,
,![]() – расстояния от центров вращения до
центров масс звеньев;
– расстояния от центров вращения до
центров масс звеньев;![]() ,
,![]() – расстояния от центров вращения до
центров корректирующих масс, расположенных
на звеньях1
и 3.
– расстояния от центров вращения до
центров корректирующих масс, расположенных
на звеньях1
и 3.
Таким образом полное статическое уравновешивание четырёх – шарнирного механизма методом заменяющих масс производится двумя противовесами, установленными на звеньях 1и3, совершающих вращательные движения. Причем общие центры масс вращающихся звеньев, заменяющих масс и противовесов оказываются в центре вращения и не меняют своего положения при движении механизма, но у выделенного отдельно звена с противовесом центр масс не будет совпадать с центром вращения.
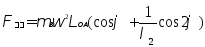
Попробуем
уравновесить методом заменяющих масс
кривошипно – ползунный механизм (рисунок
7.5),
имеющий только одно вращающееся звено
– кривошип 1.
Располагая корректирующую массу
![]() на продолжении шатуна2,
можно сместить общий центр масс
противовеса, звеньев 2
и 3
в точку A,
совершающую вращение вокруг неподвижного
центра О.
Для этого нужно обеспечить условие
на продолжении шатуна2,
можно сместить общий центр масс
противовеса, звеньев 2
и 3
в точку A,
совершающую вращение вокруг неподвижного
центра О.
Для этого нужно обеспечить условие
![]() ,
,
где
![]() ,
,![]() – массы звеньев2
и 3;
– массы звеньев2
и 3;![]() – расстояние от центра шарнираА
до центра масс
– расстояние от центра шарнираА
до центра масс
![]() звена2;
звена2;
![]() – длина шатуна2;
– длина шатуна2;
![]() – расстояние от центра
– расстояние от центра![]() корректирующей массы
корректирующей массы![]() до шарнираА.
до шарнираА.
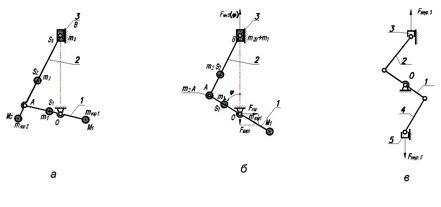
Рисунок 7.5.
Далее
становится легко объяснимым выбор
величины корректирующей массы,
расположенной на кривошипе 1
с целью уравновешивания масс звеньев
3
и 2
с корректирующими массами
![]() ,
расположенной на шатуне, и
,
расположенной на шатуне, и![]() ,
расположенной на кривошипе
,
расположенной на кривошипе
 ,
,
где
![]() - масса звена1
и расстояние её до центра вращения;
- масса звена1
и расстояние её до центра вращения;
![]() -расстояние
от корректирующей массы до центра
вращения.
-расстояние
от корректирующей массы до центра
вращения.
В
результате полного статического
уравновешивания суммарная масса
подвижных звеньев механизма 1,
2, 3
и противовесов оказалась смещенной в
неподвижную точку О.
Это означает, что кривошипно – ползунный
механизм (рисунок 7.5а)
оказался полностью статически уравновешен,
т. е. в любом положении механизма
![]() .
Несмотря на это расположение противовеса
.
Несмотря на это расположение противовеса![]() на шатуне2
практически не применяется, так как
значительно увеличивает габаритные
размеры механизма.
на шатуне2
практически не применяется, так как
значительно увеличивает габаритные
размеры механизма.
На практике часто производят частичное статическое уравновешивание кривошипно – ползунного механизма (рисунок 7.5б), при котором часть подвижных масс остается неуравновешенной. Применяя метод заменяющих масс), рассчитаем значения заменяющих масс звеньев 2 и 3, расположенных в точках А и В из условия «сохранения масс» и «сохранения центра масс»
![]() ,
,
![]() .
.
Частичное
уравновешивание кривошипно – ползунной
группы звеньев от сил инерции массы m1
и
заменяющей массы m2А
часто производят одним противовесом
![]() ,
расположенным на кривошипе1,
,
расположенным на кривошипе1,
![]() ,
,
устраняя горизонтальное действие неуравновешенной силы на основание. При этом заменяющая масса в точке В
mВ = m2В + m3
остается
неуравновешенной, передавая на основание
действие неуравновешенной силы в
вертикальном направлении. Поскольку
заменяющая масса
![]() совершает возвратно – поступательное
прямолинейное движение с ускорением
совершает возвратно – поступательное
прямолинейное движение с ускорением![]() ,
то для определения динамического
воздействия частично уравновешенного
механизма (рисунок 7.5б) на основание
рассчитаем силу инерции заменяющих
масс в точкеВ,
которая возникает при вращении кривошипа
1
с постоянной угловой скоростью
,
то для определения динамического
воздействия частично уравновешенного
механизма (рисунок 7.5б) на основание
рассчитаем силу инерции заменяющих
масс в точкеВ,
которая возникает при вращении кривошипа
1
с постоянной угловой скоростью
![]()
 .
.
Как мы это выяснили ранее при исследовании кривошипно – ползунного механизма ускорение поршня имеет две гармонические составляющие. Поэтому динамическое воздействие этого механизма на основание будет иметь две гармонические составляющие силы инерции направленной по оси ползуна ОВ
![]() ,
,
где![]() – гармоническая составляющая
неуравновешенной силы инерции первого
порядка;
– гармоническая составляющая
неуравновешенной силы инерции первого
порядка;
 –гармоническая
составляющая неуравновешенной силы
инерции второго порядка.
–гармоническая
составляющая неуравновешенной силы
инерции второго порядка.
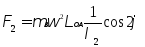
Полную статическую уравновешенность можно обеспечить и без размещения противовесов в двухцилиндровом оппозитном ДВС (рисунок 7.5в), в котором суммарная сила инерции в двух цилиндрах будет равна нулю
Fин3 = - Fин5.
Однако в этом механизме остаётся моментная неуравновешенность.