

Московский Государственный Технический Университет имени н. Э. Баумана
Отчет по преддипломной практике
«Конструкция манипулятора роботизированного участка лазерной резки»
Выполнил: Марков И.А.
Группа: РК10-121
Научный руководитель:
Воротников С.А.
Москва, 2014
Оглавление
Оглавление 2
1.Введение, Постановка задачи. 3
2. Конструкция манипулятора. 6
2.1 Габариты несущих частей 6
2.2 Проверка направляющих на рабочую нагрузку. 7
2.2.1 Расчет вертикальной направляющей. 9
2.2.2 Расчет радиальной направляющей. 10
3.Расчет подшипников. 11
3.1 Выбор типа и схемы установки подшипников. 11
3.2 Расчет подшипников на быстроходном валу. 12
3.3 Расчет подшипников на тихоходном валу. 15
4 Расчет червяка и червячного колеса. 17
1.Введение, Постановка задачи.
Фирма НПП «Гравитон» занимается выпуском автоматики для широкого спектра насосных систем. Приборы, выпускаемые этой фирмой, выполняются по концепции «Шкаф» (рис. 1). В связи с этим покупаются стандартные металлические шкафы Rittal и после дорабатываются для дальнейшей сборки.
В цикл обработки шкафа входит лазерная резка дверей, так как необходимы отверстия под вентиляцию и установку контроллера системы.


Рис. 1: Примеры продукции
На предприятии существует производственное помещение, где на данный момент установлен только станок лазерной резки, который управляется оператором.
По плану моего дипломного проекта, после модернизации участка данное помещение будет выглядеть следующим образом:
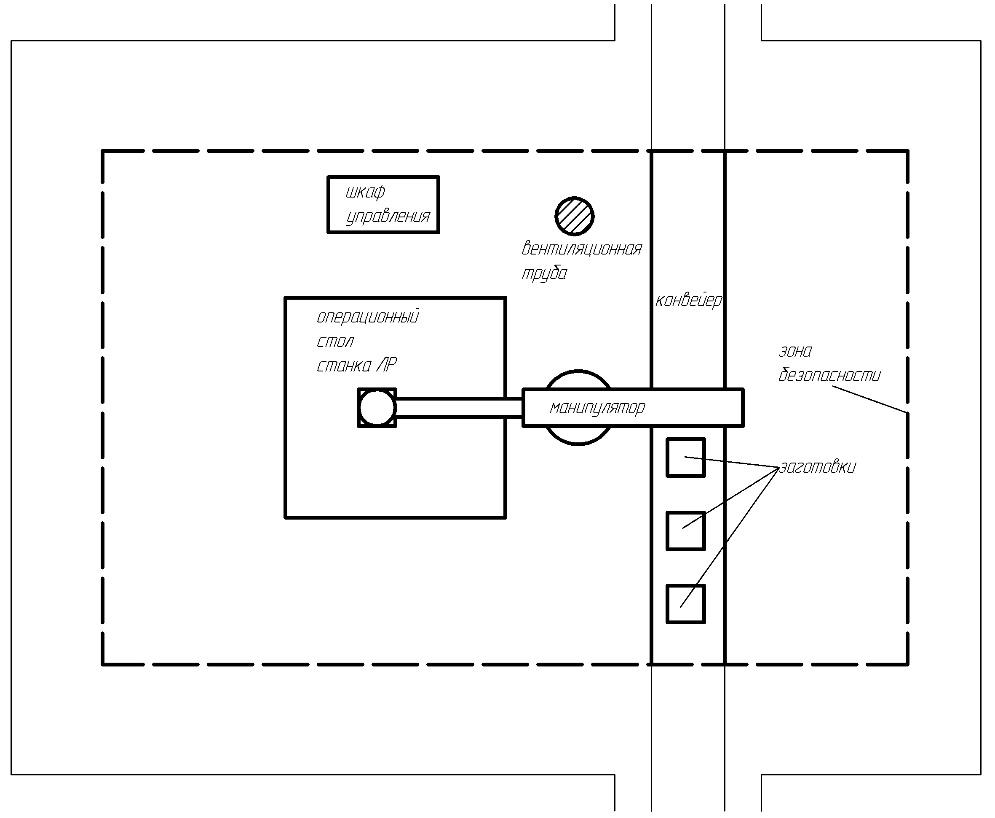
Рис 2.1 Помещение (Вид сверху)
В рамках своего дипломного проекта я проектирую роботизированный комплекс лазерной резки, который включает в себя конвейер, манипулятор, станок лазерной резки, контроллер зоны безопасности, систему технического зрения, устройство установа заготовок, и устройство управления системой. В рамках преддипломной практики я проектирую конструкцию манипулятора и рассчитываю его основные технические узлы.
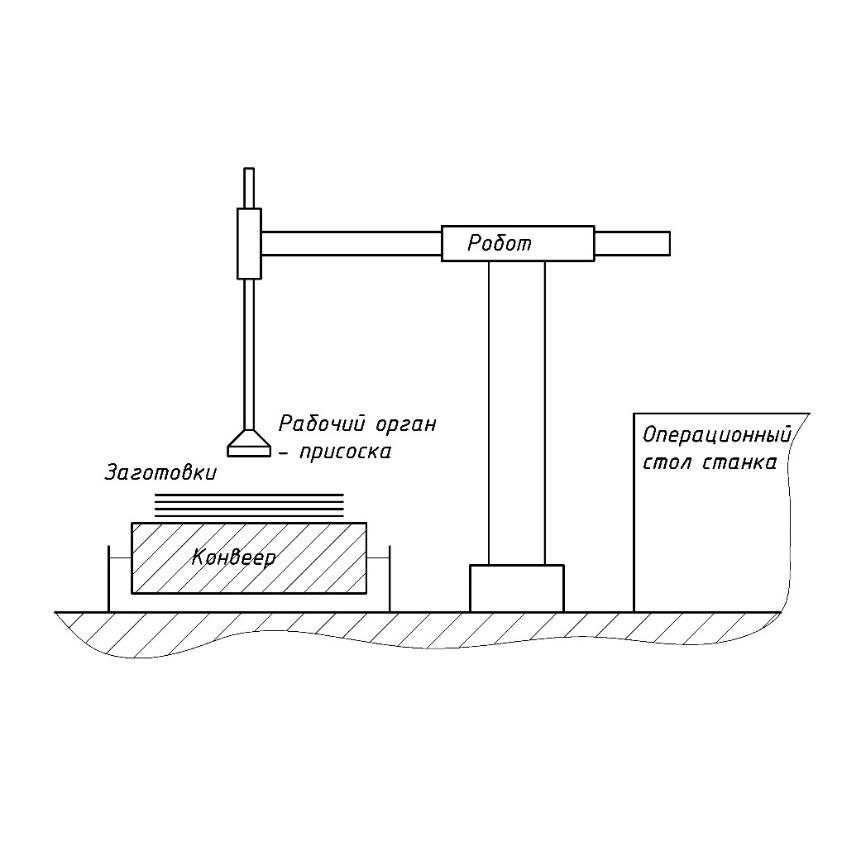
Рис 2.2 Помещение (Вид слева)
Данный робот имеет три степени свободы, угловое перемещение на опорно-поворотном устройстве, линейное перемещение на радиальной стреле, и линейное перемещение на вертикальной стреле.
Кинематическая схема робота выглядит следующим образом:
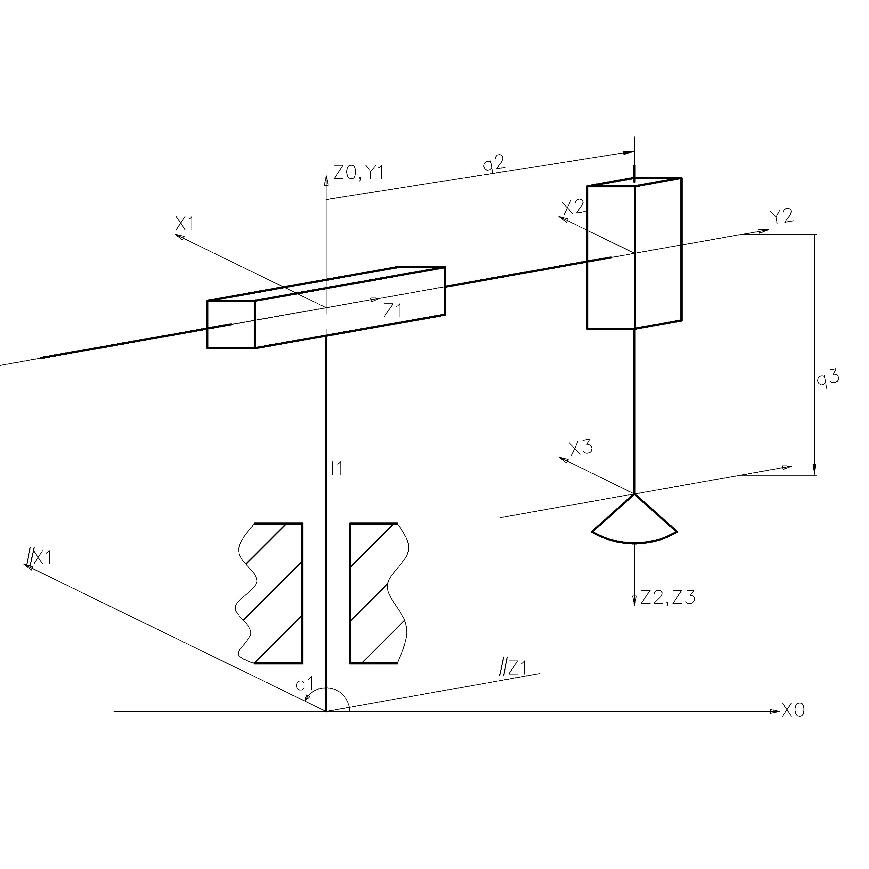
Рис 3. Кинематическая схема
После анализа схемы и рабочего участка я пришел к выводу, что все приводы робота должны быть электрическими, так как необходимо управление роботом с обратной связью по положению и скорости.
В конструкции радиальной и вертикальной стрелы я использовал ШВП, угловое перемещение осуществляется за счет опорно-поворотного устройства.
Для упрощения и ускорения процесса проектирования было принято решение использовать готовые линейные направляющие фирмы Hiwin.
2. Конструкция манипулятора.
2.1 Габариты несущих частей
Для решения поставленной задачи мне необходимо было оценить габариты звеньев манипулятора, поэтому я нарисовал 3D модель роботизированного участка, сняв размеры с реальных объектов.
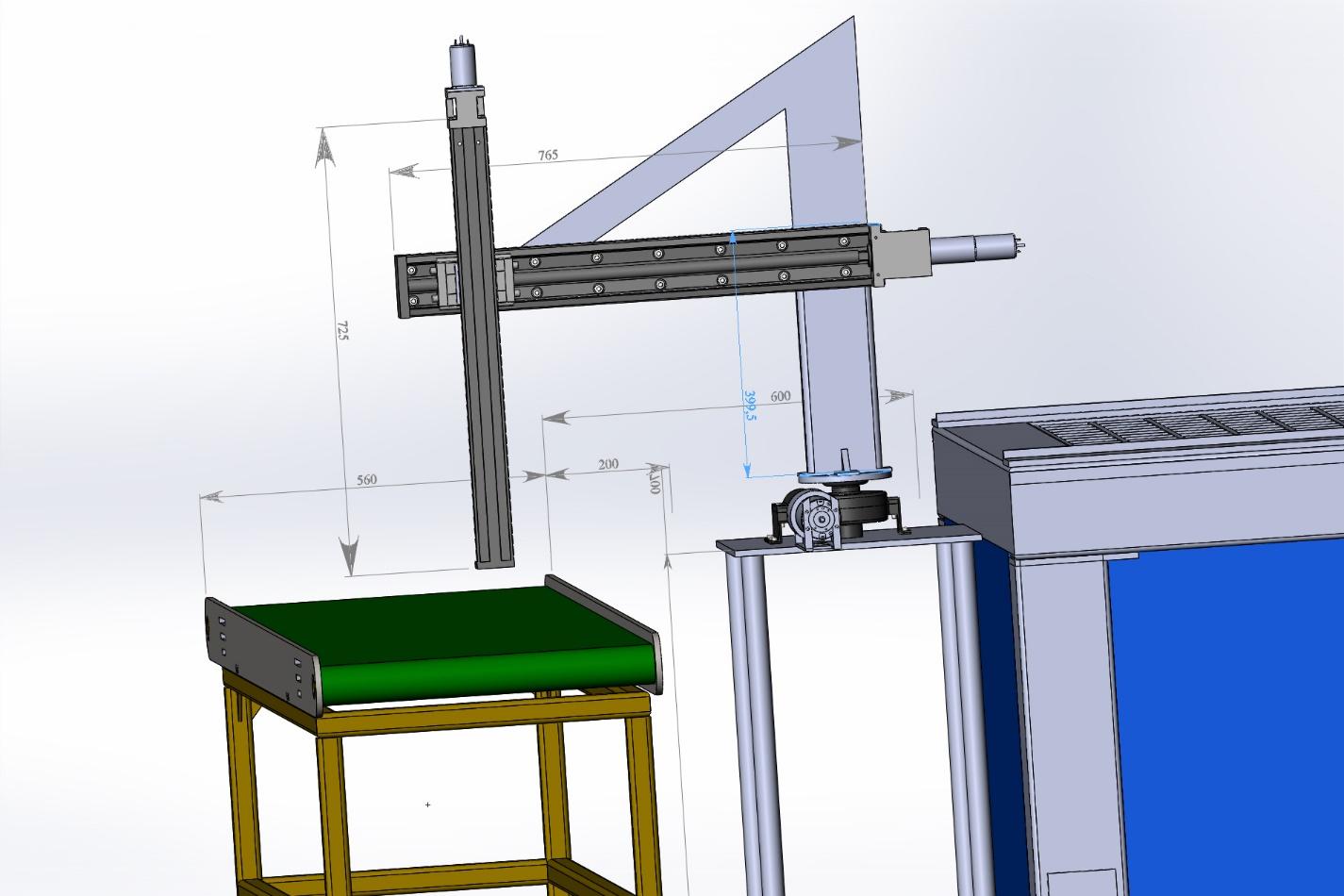
Рис. 4 Оценка габаритов манипулятора на 3D модели.
Проведя анализ 3D модели, я принял решение заказать две линейные направляющие фирмы HIWIN соответствующей длины:
Радиальную направляющую HIWIN KK100-750
Вертикальную направляющую HIWIN KK6005P-750.
Также после анализа модели было принято решение установить опорно-поворотное устройство на стойку, таким образом решаются сразу две проблемы:
Уменьшается статическая нагрузка на подшипниковые узлы опорно-поворотного устройства
Всё оборудование, необходимое для работы манипулятора, размещается в стойке.
Таким образом:
Длина радиальной направляющей – 765 мм
Длина вертикальной направляющей – 750 мм
Длина вертикальной опоры системы позиционирования – 400 мм.