

Недостатки параллельных корректирующих устройств:
Относительная дороговизна и громоздкость (например, стабилизирующих трансформаторов и др.).
Затруднения в некоторых случаях при суммировании основного сигнала и сигнала, поступающего по обратной связи (иногда технически неосуществимо).
36. Сопоставьте достоинства и недостатки типовых п-, и- и пи-регуляторов. Типовые регуляторы
Современные вентильные (с тиристорными или транзисторными преобразователями) электроприводы выполнены как замкнутые системы регулирования с обратными связями по напряжению, току и(или) скорости.
Их настройка осуществляется соответствующими регуляторами, которые реализованы как типовые узлы, выполненные на стандартной полупроводниковой элементной базе, с единообразной стандартной методикой настройки.
Предпочтение отдаётся регуляторам с наиболее простыми передаточными функциями: пропорциональному, интегральному, пропорционально-интегральному.
Пропорциональный (п-) регулятор.
Принципиальная схема этого регулятора приведена на рис. 14.1 в, а его передаточная функция
Обратим внимание на следующую особенность функционирования замкнутой системы с П-регулятором. Часто неизменяемая часть системы (объект регулирования ОР) представлена набором звеньев, имеющих конечный коэффициент усиления. В этом случае, чтобы получить на выходе системы регулирования сигнал Xвых, отличный от нуля, на вход неизменяемой части следует подать ненулевой сигнал Ху, снимаемый с выхода регулятора Р (см. рис. 14.2).
В свою очередь, при ненулевом сигнале Ху в схеме с П-регулятором должна быть отлична от нуля ошибка регулирования величин.
Эту ошибку можно уменьшить, если увеличить коэффициент усиления k регулятора и всей системы.
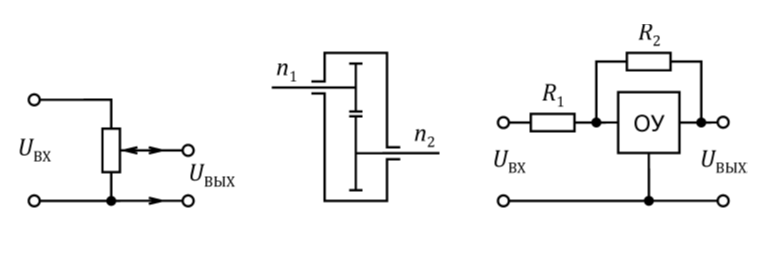
Рис. 14.1. Примеры пропорциональных звеньев: а) потенциометр; б) механический редуктор; в) П-регулятор
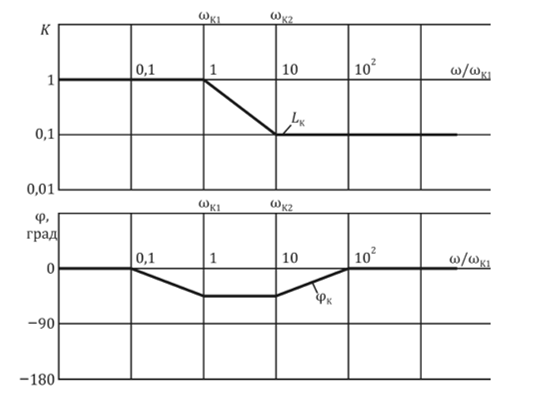
Рис. 14.2. Аппроксимированные амплитудная Lк и фазовая φк ЛЧХ звена с отставанием по фазе
Изменение величины k не вызывает изменения фазовой частотной характеристики, что положительно оценивается при настройке. Но ЛАЧХ разомкнутой системы при этом смещается по вертикали, не изменяя формы. При этом частота среза также изменяется. В результате попытка снизить ошибку регулирования Δx увеличением k неизбежно влечёт увеличение частоты среза, в результате на устойчивость контура начинают влиять звенья с неучтёнными ранее малыми постоянными времени.
Результат настройки замкнутой системы с П-регулятором, – как правило, компромисс между статической точностью и условиями устойчивости.
Если блин совсем кратко, то пропорциональное звено отвечает за быстродействие.
Интегральный (и-) регулятор.
Передаточная функция этого регулятора, принципиальная схема которого приведена на рис. 14.3 в

Включение И-регулятора в прямой канал системы регулирования, во-первых, смещает ЛФЧХ вниз на 90 градусов во всем диапазоне частот, ухудшая тем самым условия устойчивости контура регулирования, а во-вторых, увеличивает наклон ЛАЧХ во всем диапазоне частот на минус единицу. Изменение в И-регуляторе постоянной времени T вызывает смещение по вертикали ЛАЧХ разомкнутой системы, не изменяя ЛФЧХ. Тот факт, что введение в контур регулирования интегрирующего звена смещает ЛФЧХ вниз на 90 градусов, резко снижает величину запаса устойчивости по фазе, а это, в свою очередь, приводит к весьма вялым процессам регулирования.
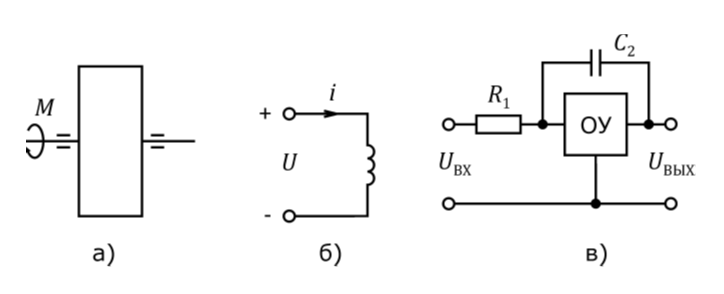
Рис. 14.3. Примеры интегрирующих звеньев: а) маховик; б) идеальная индуктивность; в) И-регулятор
Но у замкнутой системы регулирования с И-регулятором есть одно весьма ценное качество. Эта система отличается весьма малой статической ошибкой, которая теоретически даже равна нулю. Всё дело в принципе работы И-регулятора. Как в любом интегрирующем звене, его выходная величина только тогда постоянна, когда равен нулю и только нулю результирующий сигнал на входе этого звена. В случае И-регулятора любое ненулевое значение ошибки Δx вызывает переходный процесс изменения Ху и Xвых до тех пор, пока разница Xвх - Xвых не станет равной нулю.
Учитывая отмеченные особенности И-регулятора, его применяют в тех случаях, когда хотят обеспечить высокую точность регулирования в установившихся режимах, а быстродействие не столь актуально. Весьма эффективен И-регулятор, когда неизменяемая часть системы характеризуется наличием только весьма малых постоянных времени (например, одноконтурная система регулирования напряжения на выходе вентильного преобразователя в электроприводе постоянного тока), так что относительная потеря быстродействия не приводит к существенным абсолютным значениям погрешностей в контуре регулирования.