

1.3 Основные принципы регулирования
Известны и применятся три фундаментальных принципа регулирования:
1) Регулирование по разомкнутому принципу;
2) Регулирование по возмущению (компенсация возмущения);
3) Регулирование по отклонению (замкнутые системы).
Вообще, есть ещё комбинированные принципы регулирование.

По факту всё можно объяснить своими словами, где что для чего находится, дальше вот просто пояснение идёт, так как ей нужны схемы и словесное объяснение всего, что есть на схеме и слова а-ля "в разомкнутой системе стоит предустановленный регулятор, который никак не реагирует на возмущение; в регулировании по возмущению главное суметь измерить возмущение, и потом привести нужные величины на регулятор, чтобы он его скомпенсировал; в регулировании по отклонению мы не измеряем возмущение, а измеряем ошибку выходной величины, чтобы как раз свести её к нулю". Бля, я объяснил всю лекцию за 1 абзац, а она нам втирала какую-то дичь полтора часа.
Регулирование по разомкнутому принципу

Разомкнутый принцип регулирования заключается в том, что алгоритм управления вырабатывается только на основе принятого алгоритма функционирования объекта регулирования и никак не контролируется ни внешними возмущениями Z, ни величиной выходной координаты y(t).
Например, необходимо обеспечить поддержание во времени выходной величины y(t) в соответствии с законом изменения, диктуемым величиной задания x0(t). Для этого на вход объекта регулирования ОР подключают управляющее устройство (регулятор) Р, а на его вход воздействуют величиной x0(t). Структурная схема имеет вид разомкнутой цепочки, отсюда и название принципа.
Регулирование по возмущению (компенсация возмущения)

Регулирование по возмущению (компенсацию возмущения) применяют, когда возмущения Z, которые вызывают существенное отклонение регулируемой величины y(t) от заданного значения x0(t), удаётся измерить, после чего по результатам этих измерений так скорректировать алгоритм управления объектом регулирования ОР, чтобы ошибка регулирования стала минимальной. С этой целью, кроме естественно существующего канала передачи возмущения Z и обусловленного самой физикой работы ОР, организуется дополнительный искусственный канал передачи компенсирующего сигнала xk, воздействующий через измерительное устройство (узел компенсации УК) так, чтобы действие xk было равнопротивоположным действию возмущения Z.
В простейшем случае, когда статические характеристики ОР линейны и могут быть в установившемся режиме записаны в виде линейных уравнений, результирующее отклонение приращения выходной величины:
Δy = Δy1 + Δy2 = -kz * ΔZ + kУК * kр * kx * ΔZ,
где Δy1 и Δy2 – приращения выходной величины, вызванные приложением возмущения ΔZ и компенсирующего сигнала xk; kz и kx – коэффициенты усиления объекта регулирования ОР по каналам передачи сигналов Z и X; kУК и kр – коэффициенты усиления звеньев УК и Р.
Если выбрать kz = kУК * kр * kx , то Δy = 0. То есть достигается полная компенсация возмущения Z (в нашем случае – только в статических режимах).
Регулирование по отклонению (замкнутые системы)
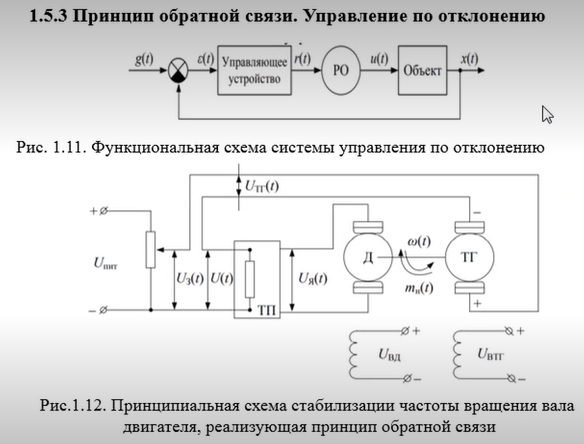
Регулирование по отклонению является наиболее универсальным способом регулирования. Идея его поясняется схемой, где сигнал xp управляющего устройства (регулятора Р) формируется в функции разницы (ошибки)
Δx(t) = x0(t) – xос(t) (ОС – обратная связь)
между заданным (желаемым) значением x0(t) и xос(t) – измеренным значением регулируемой (выходной) величины y(t).
Схема имеет вид замкнутого контура, в котором распространение (передача) воздействий происходит строго в одном направлении, указанном стрелками. Выражение для Δx(t) называют также уравнением замыкания системы, а канал ОС, который осуществляет измерение выходной координаты y(t) и подачу измеренного значения xос(t) на вход управляющего устройства Р, – каналом обратной связи.
Комбинированные САУ
Наиболее эффективными являются системы автоматического управления/регулирования (САУ/САР), реализующие совместно и принцип обратной связи (управление по отклонению) и принцип компенсации возмущений (управление по возмущению), так называемые комбинированные САУ (САР).

Входящие в алгоритм величины определяют принципы управления (регулирования):
1) Комбинированный принцип управления (регулирования):

2) Принцип управления (регулирования) по возмущению:
![]()
3) Принцип управления (регулирования) по отклонению:

Автоматический регулятор, действующий по отклонению, обязательно реагирует на ε, стремясь её уменьшить. Введение в закон регулирования остальных величин производных и интегралов от ε по времени играет вспомогательную роль (используется как коррекция качества регулирования).