

Оглавление
1. Понятие об автоматическом управлении. Классификация САУ. 3
2. Дайте характеристику понятиям “управление” и “регулирование”. 8
3. Что такое объект регулирования и какие переменные характеризуют его состояние? 9
4. Назовите основные принципы регулирования и дайте их сравнительную оценку. 11
Вопросы 5-7 общая часть: 17
5. Что такое линеаризация характеристики звена системы регулирования? В чем её польза? При выполнении каких условий она допустима? 19
6. Дифференциальное уравнение системы. Поясните суть стандартной формы дифференциального уравнения системы регулирования 21
7. Структурные схемы. Основные элементы структурных схем. Правила преобразования структурных схем. 24
8. Структурные схемы и передаточные функции многозвенных систем регулирования. 39
9. Передаточные функции САУ. Передаточная функция динамического звена. 44
10. Перечислите основные виды типовых входных воздействий на систему регулирования. 48
11. Линеаризация системы автоматического управления. 51
12. Временные характеристики динамических звеньев САУ. 53
13. Частотная передаточная функция и частотные характеристики. 58
14. Поясните и обоснуйте преимущества логарифмических частотных характеристик. 64
15. Типовые звенья САУ. Статическое звено, Апериодическое звено первого и второго порядков, колебательное. 69
16. Типовые звенья САУ. Дифференцирующие звенья (идеальное и реальное). 83
17. Типовые звенья САУ. Интегрирующие звенья (идеальное и реальное). 86
18. Общий метод составления дифференциальных уравнений и передаточные функции систем автоматического управления. 90
19. Получение передаточной функции и частотных характеристик САУ по передаточным функциям и частотным характеристикам её звеньев. 93
20. Устойчивость линейных САУ. Понятие об устойчивости. 94
21. Что такое критерий устойчивости? 99
22. Критерии устойчивости. Критерий Гурвица и критерий Рауса. 100
23. Критерии устойчивости критерий Найквиста. 104
24. Критерии устойчивости критерий Михайлова. 109
25. Статический режим систем автоматического управления. Понятие статического и стационарного режима. Статизм. 113
26. Статический режим систем автоматического управления. Способы устранения статического отклонения. 116
27. Методы оценки качества управления, показатели качества управления. 122
28. Качество переходных процессов. Понятие качества переходных процессов. Использование переходной характеристики. 137
29. Построение областей устойчивости в плоскости параметров системы автоматического управления. D–разбиение. 143
30. Синтез линейных систем автоматического регулироования, Желаемые ЛАЧХ системы автоматического управления. 149
31. Синтез методом логарифмических частотных характеристик. ЛАЧХ и ЛФЧХ ТДЗ и систем (метод Солодовникова). 152
32. Качество переходных процессов. Частотные оценки качества процесса регулирования. 160
33. Коррекция динамических свойств САУ. Последовательные корректирующие звенья. 166
34. Коррекция динамических свойств САУ. Жёсткие обратные связи. 170
35. Коррекция динамических свойств САУ. Гибкие обратные связи. 176
36. Сопоставьте достоинства и недостатки типовых П-, И- и ПИ-регуляторов. 182
37. Что такое стандартные настройки регуляторов? 187
38. Как, пользуясь правилами стандартных настроек, выбрать параметры ПИ-регулятора? 190
39. Какие элементы системы автоматического регулирования могут выбираться при синтезе? 191
40. В каком порядке осуществляется выбор корректирующих устройств методом ЛЧХ? 192
1. Понятие об автоматическом управлении. Классификация сау.
1. Управление технологическим процессом. Регулирование.
1.1 Понятия управления и регулирования технологическим процессом
Совокупность операций, необходимых для пуска и остановки процесса, а также для поддержания или изменения в требуемом направлении величин, характеризующих процесс, называется управлением. Совокупность операций управления, которые относятся к поддержанию или изменению показателей процесса, представляют собой регулирование.

На графике представлено, что все 3 участка – это управление, и лишь второй участок – это регулирование.
Рабочие операции – это действия, непосредственно необходимые для выполнения технологического процесса в соответствии с теми физическими законами, которые определяют существо процесса, например, прокатка металла, транспортировка изделий и т.п. Рабочие операции создаются человеком искусственно и сами по себе не протекают так, "как надо". По этой причине рабочими операциями необходимо управлять.
Операции управления – это действия, которые обеспечивают начало, порядок следования, конец операций; выделяют необходимые ресурсы; задают нужные параметры самому процессу (скорость, температуру, давление и др.).

1.2 Объект регулирования
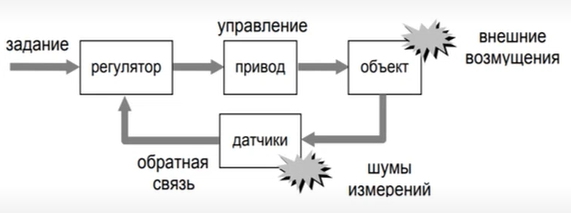
Важнейшими понятиями теории автоматического регулирования являются объект регулирования (ОР), управляющее устройство (или регулятор – Р), управляющие и возмущающие воздействия.
Состояние ОР может быть представлено системой дифференциальных уравнений, которые описывают его физическую природу и образуют математическую модель объекта. В других случаях его свойства описываются статическими и динамическими характеристиками или иным способом. В общем виде ОР можно представить схемой, на которой указаны: регулируемые переменные (выходные координаты) y1…yn, возмущающие воздействия (возмущения) z1…zk, управляющие (входные) воздействия x1…xm, а также промежуточные (внутренние) координаты u1…u2.

Рассмотрим в качестве объекта регулирования асинхронный двигатель, приводящий в движение центробежный водяной насос. В качестве регулируемой координаты выберем угловую скорость n вращения вала АД, в качестве управляющего воздействия f – частоту напряжение на статоре. Однако, слишком низкая частота приведёт к насыщению магнитной системы АД и, следовательно, к недопустимо большому току намагничивания, перегреву изоляции и даже к выходу АД из строя. Поэтому в регулируемых по скорости асинхронных электроприводах в качестве управляющих воздействий выбирают и частоту f и напряжение на статоре U. В качестве возмущающих воздействий обычно принимают изменение момента статической нагрузки Mc и колебания напряжения ΔUc питающей сети. В некоторых случаях есть опасность появления значительных перегрузок электропривода. Тогда полезно следить за величиной тока статора I, которую удобно представить промежуточной регулируемой переменной.
Структура системы
Классификация систем автоматического управления
Все существующие системы автоматического управления можно классифицировать следующим образом:
1) По принципу управления:
-САУ по возмущению; -САУ по отклонению; -комбинированные САУ.
2) По алгоритму функционирования:
-системы стабилизации (g(t)=const – надо получить конкретное выходное значение); -системы программного управления [g(t) – заданная f(t), надо получить заранее известную функцию]; -следящие системы (g(t) – неизвестная функция; нам нужно корректировать значение во время работы).
3) По характеру функционирования:
-обычные; -адаптивные; -самонастраивающиеся; -экстремальные; -самоорганизующиеся.
4) По виду сигналов:
-непрерывные; -дискретные; -цифровые; -релейные; -импульсные.
5) По виду математического описания:
-линейные; -стационарные (неизменная выходная величина); -нестационарные;
-нелинейные;
6) По количеству координат объекта управления:
-одномерные; -многомерные; -связанного управления; -несвязанного управления
7) По энергии, используемой для перемещения регулирующего органа:
-САУ прямого управления (Р и ОР связаны напрямую); -САУ непрямого управления