

4.2.5. Переходные процессы при линейном изменении
напряжения на якоре электродвигателя
Условия работы производственных механизмов требуют от электропривода обеспечения соответствующего формирования переходных режимов, направленного на достижение либо максимального быстродействия, либо минимума потерь, либо ограничения динамических нагрузок, возникающих в элементах кинематических цепей, связывающих электропривод с рабочим органом машины, и т. д.
Формирование переходных процессов можно осуществить двумя кА минимум двумя способами:
а) введением линейного закона нарастания и спадания на-
пряжения на обмотке якоря;
132
б)введением экспоненциального закона нарастания на-
пряжения на обмотке якоря.
Первый способ формирования переходных процессов нашел широкое применение в системе "тиристорный преобразователь-двигатель" (ТП-Д). Законы изменения напряжения питания на обмотке якоря приведены на рис.4.15.
Рис.4.15. График напряжения на обмотке якоря
На графике рис.4.15 показаны три режима работы электродвигателя:
- промежуток времени от 0 до точки А происходит нарастание напряжения питания от 0 до максимального значения Uн и определяется формулой
ω0(t) = εпt при 0 < t ≤ tп0 (4.14)
где εп – угловое ускорение электропривода при пуске, характеризующее темп изменения ω0;
- промежуток времени отточки А до точки В–уста-новившейся режим работы электропривода
ω0 = ω0уст
-промежуток времени от точки В до точки С происходит спадание напряжения питания до 0 и определяется формулой
ω0(t) = ω0уст– εtt при tTнач < t <∞ (4.15)
133
4.2.5.1. Пуск на холостом ходу
Исходным для анализа переходных процессов в этом режиме является уравнение (4.6) при подстановке в него установив-шегося значения ωуст = ω0(t) = εпt, т.е.
ТМ + ω = εпt. (4.16)
Решение этого уравнения записывается в виде
ω =
εпt
+ В + С![]() ,
(4.17)
,
(4.17)
где В и С – постоянные интегрирования. Постоянную интегрирования В находят подстановкой
ω = εпt + В
и его интеграла = εп в выражение (4.16)
ТМ εп + εпt + В = εпt,
откуда
В= - ТМ εп
После подстановки в выражение (4.17)
ω = εпt - ТМ εп + С .
Постоянную интегрирования С находят из начальных условий (при t = 0, ωнач = 0), т.е.
С = ТМεп.
Окончательное решение получаем в виде
ω = εпt - ТМ εп (1 - ). (4.18)
Из выражения (3.15) выразим момент, развиваемый электродвигателем
М = β(ω0 – ω) (4.19)
и подставим сюда значение жесткости механической характеристики β из (3.14), скорости ω из (4.18) и ω0(t) из (4.14), получим
М = Jεп (1 - ). (4.20)
Здесь
Мmax = Jεп.
134
tп0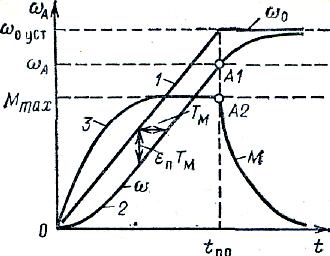 К
К
Рис. 4.16. Графики переходных процессов при пкске
вхолостую
Как видно из графика переходых процессов, кривая напряжения на якоре (кривая 1), или частота вращения холостого хода ω0 = f(t), cостоит из двух участков ( в соответствии с рис.4.15).
Зависимости ω(t) и М(t) на первом этапе времени (0 < t ≤ tп0) , соответствующие выражениям (4.18) и (4.20), изображены кривыми 2 и 3 на рис.4.16.
При t > ЗTМ момент ДПТ становится практически постоянным, а скорость изменяется по линейному закону. Действительно, при этом = 0 и выражения (4.18) и (4.20) приобретают вид
ω = εпt - ТМ εп при 3Тм<t ≤ tп0 (4.21)
М = Jεп при 3Тм<t ≤ tп0 (4.22)
Из выражения (4.21) следует, что в этом временном интервале скорость ДПТ меньше скорости холостого хода на величину εпt – ω = ТМ εп , а отставание по времени равно механи- ческой постоянной времени ТМ (рис.4.16). Из выражения
(4.22) можно найти допустимое значение
135
εп = М/ J.
На втором этапе переходного процесса при t > tп0 и ω0(t) = const зависимости скорости и тока, а, следовательно и момента, соответствуют выражениям (4.8) и (4.10).