

4.1.2 Графическое и графо – аналитическое ре-
шение уравнения движения привода
Если невозможно аналитически решить уравнение движения электропривода (2.1), то его решают, например, так называемым методом пропорций или методом конечных приращений. Сущность этого метода заключается в замене бесконечно малых приращений скорости dω и времени dt малыми конечными приращениями ∆ω и ∆t . При этом предполагается, что в уравнение движения. электропривода подставляются средние значения момента двигателя и момента сопротивления для каждого интервала изменения скорости. Эти средние значения моментов обычнo находятся графическим путем на основании механических характеристик двигателя и производственного механизма. Рассмотрим применение метода пропорций на примере привода вентилятора от асинхронного двигателя с короткозамкнутым ротором. Метод пропорций основан, как указывалось выше, на следующей записи уравнения движения электропривода:
М – Мс = J∆ω / ∆t
Считая, что в некотором интервале времени Д/ раз ность моментов М — Мс остается величиной постоянной получаем пропорцию
(M – Mc) / J = ∆ω / ∆t ( 4.2 )
На рис. 4.2 показан ход графического построение кривой скорости ω = f(t), выполненного на основании пропорции (4.2), и нахождения времени пуска двигателя. Построение ведется следующим образом. В левом квадранте строятся характеристики ω = f(M) и ω= f1(Мс). Графически находится их разность ω = (М — Мс) — кривая динамического момента, изображаемая в том же квадранте. Последнюю кривую заменяют ступенчатой с участками М — Мс = соnзt. От числа участков зависят точность построений и конечные результа-
114
ты. Точность тем выше, чем на большее число участков разбита кривая ω = (М — Мс) .
Полученные на отдельных участках значения динамических моментов откладывают вверх на оси ординат. Так, для первого участка получаем отрезок 0В, для второго ОВ1 и т. д. Отмеченные на оси ординат точки В, Вг, В2 и т. д. соединяют прямыми с точкой А, находящейся от начала координат на расстоянии, пропорциональном величине J. Затем из начала координат проводят прямую ОС, параллельную АВ. Последняя прямая характеризует искомую функцию ω = I (t) для первого участка моментов. Это следует из подобия треугольников АОВ и ОDС.
Действительно, ОВ/ОА = СD/ОD, но 0В = М1 — Мс1, ОА — J; СD = ∆ω, следовательно, отрезок ОD согласно уравнению (4.2) соответствует времени пуска на первом участке, т. е. ОD = ∆t1.
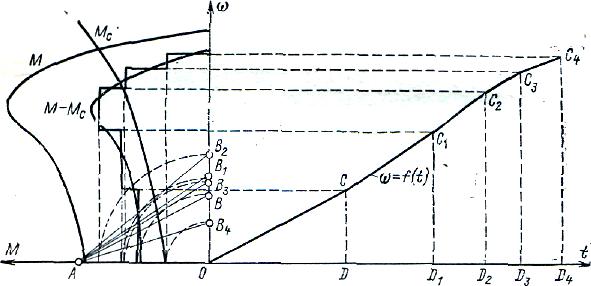
Рис. 4.2. Построение переходного процесса методом
пропорций.
Проведя аналогичное построение для всех последующих участков М — Мс, строим кривую скорости двигателя и находим искомое время пуска привода.
115
При построении следует учитывать масштабы величин, связанные между собой соотношением
mM / mJ = mω / mt,
где тм — масштаб момента; тJ — масштаб момента инерции J; тω — масштаб скорости двигателя; тt — масштаб времени.
Если задаться масштабами трех величин: момента, ско-рости, времени, то из приведенного соотношения находится масштаб четвертой величины — момента инерции J.
Подобный метод построения кривой скорости для определения времени пуска применим также для двигателей постоянного тока, если механические характеристики не могут быть выражены аналитически. Этот метод расчета может быть применен не только для пусковых, но и для тормозных режимов.
 Кроме
метода пропорций, для построения кривой
угловой
скорости ω = f{t)
и определения времени пуска двигателя
используется метод площадей, сводящийся
к графоаналитическому
интегрированию уравнения движения.
Задаются механическими характеристиками
двигателя
и производственного механизма.
Кроме
метода пропорций, для построения кривой
угловой
скорости ω = f{t)
и определения времени пуска двигателя
используется метод площадей, сводящийся
к графоаналитическому
интегрированию уравнения движения.
Задаются механическими характеристиками
двигателя
и производственного механизма.
Н-м 200 100
0 0,1 0,2 0,3 0,4 с.
вентилятора
116
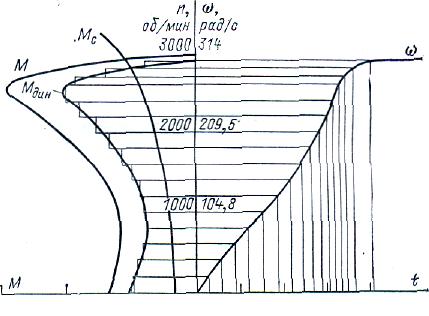
Затем эти две характеристики совмещаются и, как в предыдущем случае, определяется кривая динамического момента Мдин = М — Мс (рис.4.3). Кривая динамического мо-мента делится на ряд участков, на каждом из которых момент предполагается постоянным и равным среднему значению. Для каждого участка будет справедливо следующее выражение:
∆t = J ∆ω / (М – Мс).
При равенстве значений ∆ω> на всех участках общее время пуска определится по формуле
t =
![]() .
.
где т — число участков; ∆ω = соnst; — перепад угловой скорости на каждом участке; М — Мс — соответствующее значение динамического момента (М1, M2 ...) на каждом из участков.
Графическое построение кривой скорости для торможения привода выполняется аналогично. Следует лишь иметь в виду, что при торможении динамический момент обычно представляет сумму моментов двигателя и статического (реактивный статической момент, потенциальный момент при подъеме груза) и имеет отрицательный знак. Поэтому при построении он откладывается по оси ординат вниз от точки 0. Соответственно и треугольники, основанием которых является отрезок ОА, располагаются в третьем квадранте. Для случая вентиляторного статического момента графическое построение выполнено на рис. 4-4. Построение носит тот же характер, что на рис. 4-2
Очень часто при анализе работы электроприводов ряда исполнительных механизмов требуется построение кривой пути, проходимого рабочим органом механизма.
Пройденный рабочим органом механизма путь может быть выражен углом поворота якоря двигателя α (или числом оборотов двигателя N).
Угловой путь за время dt равен:
dα = ωdt (4.3)
117

Рис.4.4. Построение кривой скорости привода в
режиме торможения
В соответствии с (4.3) путь, пройденный как за весь процесс, так и на отдельных его участках, может быть определен в результате интегрирования кривой скорости ω== f(t).
Площадь, ограниченная осью абсцисс, этой кривой и двумя ординатами, соответствующими началу и концу участка t1 и t2 пропорциональна пройденному пути:
α
=
Для построения кривой пути также может быть применен принцип пропорций. Используя равенство (4.3) и переходя к конечным приращениям, получим:
![]()
118
При графическом построении все величины выражаются в отрезках определенной длины соответственно выбранным масштабным коэффициентам. Если принять масштабы: для угла поворота μа, для времени μt и для скорости μω, то равенство (4.3) в отрезках может быть представлено так:
 ,
(4.4)
,
(4.4)
где
R =
![]() –
произвольная
величина, определяемая соотношением
масштаба.
Величина
R
имеет размерность длины.
–
произвольная
величина, определяемая соотношением
масштаба.
Величина
R
имеет размерность длины.
Построение кривой пути на принципе пропорций показано на рис. 4.5. Кривая ω =f(t), построение которой было рассмотрено выше, разбивается на ряд участков и заменяется ступенчатой. Скорость на каждом участке принимается равной среднему значению (точнее, разбивка производится таким образом, чтобы площадки, создаваемые ступенчатой кривой по обе стороны исходной кривой ω= (t), были равновеликими). На оси абсцисс откладывается величина R— О А и проводится вертикаль АВ.
Путь за первый участок, соответствующий времени ∆t, находится следующим образом. Линия G1T1, проведенная на уровне среднего значения скорости на первом участке, продолжается до пересечения с вертикалью АВ. Точка О соединяется с полученной точкой H1 прямой линией. Из точки T1 на ось абсцисс опускаем перпендикуляр. Отрезок Q1S1 в соответствующем масштабе представляет путь, пройденный на первом участке. Действительно, из подобия треугольников ОАН1 и ОQ1S1 находим:
![]()
119
ω4
Рис. 4.5. Построение кривой пути
Так как
АН1
=
![]() ;
ОА = R; OQ1
=
;
ОА = R; OQ1
=
![]() ,
,
то
Q1S1
=
![]() .
.
Для определения пути на втором участке продолжается вправо линия G2T2. Полученная точка H2 соединяется с на чалом координат, и из точки Т2 опускается перпендикуляр.
Из подобия треугольников ОАН2 и 0'Q2S2 вытекает, что от-
120
резок
S2Q2
=
![]() .
Проводя через точку
S1
линию, параллельную 0'S2,
получаем отрезок S1
.
Проводя через точку
S1
линию, параллельную 0'S2,
получаем отрезок S1![]() кривой а
= f(t),
соответствующий второму участку. Все
дальнейшее построение
аналогично и понятно из чертежа.
кривой а
= f(t),
соответствующий второму участку. Все
дальнейшее построение
аналогично и понятно из чертежа.
Величина пути на каждом участке может быть вычислена и аналитически. Путь за х-ыи участок будет равен:
∆αx
=
![]() ,
,
где ω x-1 и ωх — скорости вращения привода в начале и в конце рассматриваемого участка.