

5.4. Разложение вектора по ортам координатных осей. Модуль вектора. Направляющие косинусы
Рассмотрим
в пространстве прямоугольную систему
координат
![]() .
Выделим на
координатных осях
.
Выделим на
координатных осях
![]() ,
,
![]() и
и
![]() единичные векторы (орты), обозначаемые
единичные векторы (орты), обозначаемые
![]() ,
,
![]() ,
,
![]() соответственно (см. рис. 5.12).
соответственно (см. рис. 5.12).
Выберем
произвольный вектор пространства и
совместим его начало с началом координат:
![]() .
.
Найдем
проекции вектора
на координатные оси. Проведем через
конец вектора
![]() плоскости, параллельные координатным
плоскостям. Точки пересечения этих
плоскостей с осями обозначим соответственно
через
,
плоскости, параллельные координатным
плоскостям. Точки пересечения этих
плоскостей с осями обозначим соответственно
через
,
![]() и
и
![]() .
Получим прямоугольный параллелепипед,
одной из диагоналей которого является
вектор
.
Получим прямоугольный параллелепипед,
одной из диагоналей которого является
вектор
![]() .
.
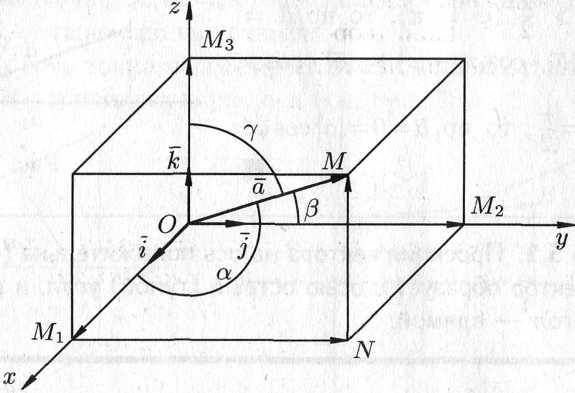
Рис. 5.12.
Тогда
![]() ,
,
![]() ,
,
![]() .
По определению суммы нескольких
векторов находим
.
По определению суммы нескольких
векторов находим
![]() .
.
А
так как
![]() ,
,
![]() ,
то
,
то
![]() .
(5.1)
.
(5.1)
Но
![]() ,
,
![]() ,
,
![]() .
(5.2)
.
(5.2)
Обозначим
проекции вектора
на оси
,
и
![]() соответственно через
соответственно через
![]() ,
,
![]() и
и
![]() ,
т. е.
,
т. е.
![]() ,
,
![]() ,
,
![]() .
Тогда из равенств (5.1) и (5.2) получаем
.
Тогда из равенств (5.1) и (5.2) получаем
![]() .
(5.3)
.
(5.3)
Эта формула является основной в векторном исчислении и называется разложением вектора по ортам координатных осей.
Числа , , называются координатами вектора , т. е. координаты вектора есть его проекции на соответствующие координатные оси.
Векторное
равенство (5.3) часто записывают в
символическом виде:
![]() .
.
Равенство
![]() означает, что
означает, что
![]() .
.
Зная проекции вектора , можно легко найти выражение для модуля вектора. На основании теоремы о длине диагонали прямоугольного параллелепипеда можно написать
![]() ,
т.е.
,
т.е.
![]() .
(5.4)
.
(5.4)
Отсюда
![]() ,
,
т. е. модуль вектора равен квадратному корню из суммы квадратов его проекций на оси координат.
Пусть
углы вектора
с осями
,
и
соответственно равны
![]() ,
,
![]() ,
,
![]() .
По свойству проекции вектора на ось,
имеем
.
По свойству проекции вектора на ось,
имеем
![]() ,
, ![]() ,
, ![]() .
(5.5)
.
(5.5)
Или, что то же самое,
 ,
,
 ,
,
 .
.
Числа
![]() ,
,
![]() ,
,
![]() называются направляющими
косинусами
вектора
.
называются направляющими
косинусами
вектора
.
Подставим выражения (5.5) в равенство (5.4), получаем
![]() .
.
Сократив
на
![]() ,
получим соотношение
,
получим соотношение
![]() ,
,
т. е. сумма квадратов направляющих косинусов ненулевого вектора равна единице.
Легко
заметить, что координатами единичного
вектора
являются числа
![]() ,
,
![]() ,
,
![]() ,
т.е.
,
т.е.
![]() .
Итак, задав координаты вектора, всегда
можно определить его модуль и направление,
т. е. сам вектор.
.
Итак, задав координаты вектора, всегда
можно определить его модуль и направление,
т. е. сам вектор.
5.5. Действия над векторами, заданными проекциями
Пусть векторы и заданы своими проекциями на оси координат , и или, что то же самое
, .
Линейные операции над векторами.
Так как линейные операции над векторами сводятся к соответствующим линейным операциям над проекциями этих векторов, то можно записать:
1.
![]() ,
или кратко
,
или кратко
![]() .
.
То есть при сложении (вычитании) векторов их одноименные координаты складываются (вычитаются).
2.
![]() или короче
или короче
![]() .
.
То есть при умножении вектора на скаляр координаты вектора умножаются на этот скаляр.
Равенство векторов.
Из
определения вектора как направленного
отрезка, который можно передвигать в
пространстве параллельно самому себе,
следует, что два
вектора
и
равны
тогда и
только тогда, когда выполняются равенства:
![]() ,
,
![]() ,
,
![]() т. е.
т. е.
Коллинеарность векторов.
Выясним условия коллинеарности векторов и , заданных своими координатами.
Так
как
,
то можно
записать
![]() ,
где
— некоторое число. То есть
,
где
— некоторое число. То есть
![]()
![]() .
.
Отсюда
![]() ,
,
![]() ,
,
![]() .
.
т.е.
![]() ,
,
 ,
,
![]() или
или
 .
.
Таким образом, проекции коллинеарных векторов пропорциональны. Верно и обратное утверждение: векторы, имеющие пропорциональные координаты, коллинеарные.
Координаты точки.
Пусть
в пространстве задана прямоугольная
декартова система координат
.
Для любой точки
координаты вектора
называются координатами
точки
.
Вектор
называется радиус-вектором
точки
,
обозначается
![]() ,
т.е.
,
т.е.
![]() .
Следовательно,
координаты точки — это координаты ее
радиус-вектора
.
Следовательно,
координаты точки — это координаты ее
радиус-вектора
![]() или
или
![]() .
.
Координаты
точки
записываются в виде
![]() .
.
Координаты вектора.
Найдем
координаты вектора
![]() ,
если известны координаты точек
,
если известны координаты точек
![]() и
и
![]() .
Имеем (см. рис.
5.13):
.
Имеем (см. рис.
5.13):
![]()
![]() .
.
Следовательно,
координаты
вектора равны разностям соответствующих
координат его конца и начала:
![]() .
.
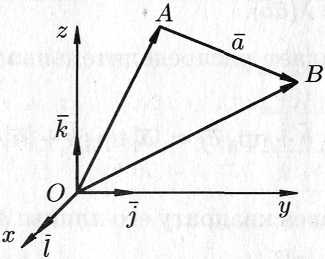
Рис. 5.13.