

ЛР7
.pdfОтчет по лабораторной работе № 7 по дисциплине «Электромеханические системы» на тему
«Приближенные методы настройки регуляторов»
Цель работы: изучить метод Циглера-Никольса расчета параметров П-, ПИ-, ПИДрегуляторов, формульный метод расчета параметров ПИД-регулятора, сравнить системы автоматического регулирования с различными типами регуляторов.
1.Расчет параметров регулятора первого объекта с помощью первого варианта метода Циглера-Никольса
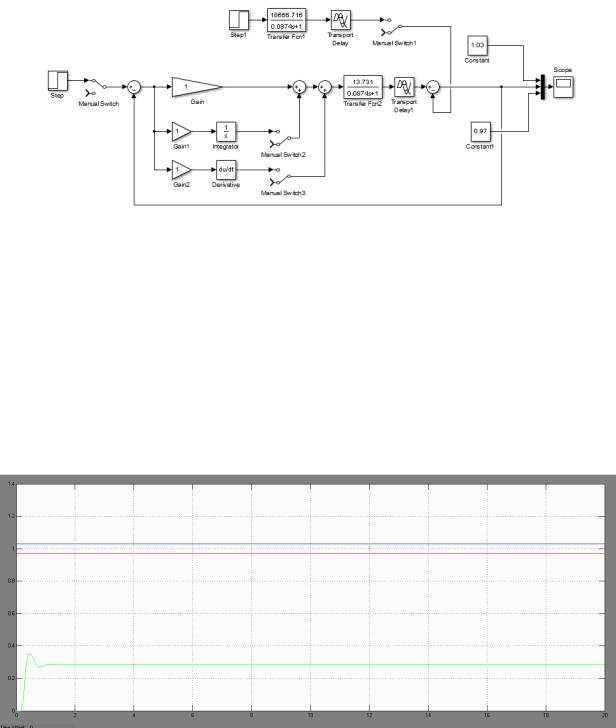
Схема САР с первым объектом представлена на рис.1.
Рисунок 1
При kп* = 1,7624 на выходе системы устанавливаются колебания с постоянной амплитудой (рис.2).
Рисунок 2
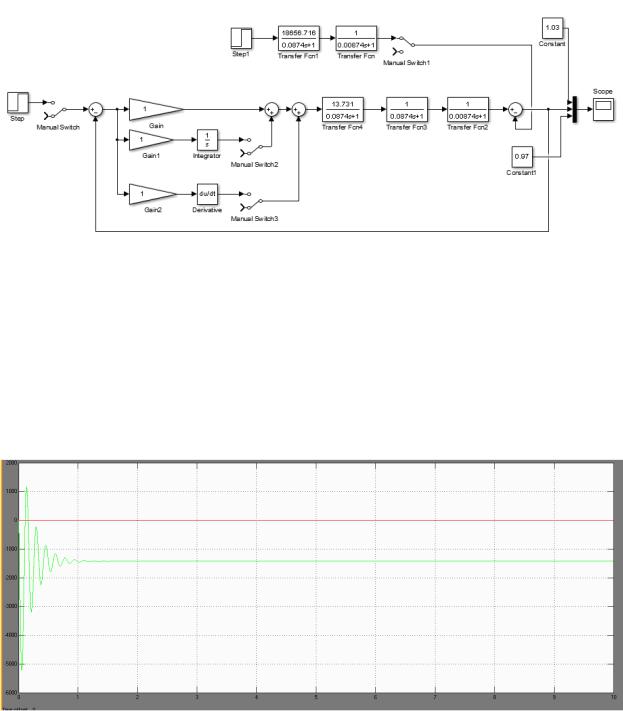
Из рис. 2 определим период колебаний Т* = 0,12 с.
Добавим в схему блоки констант для получения коридора единичного сигнала ±3 % (рис.3).
Рисунок 3
1.1.Расчет параметра П-регулятора
Пропорциональный коэффициент: kп = 0,5kп* = 0,5*1,7624 = 0,8812
Переходный процесс при параметре П-регулятора kп = 0,8812 представлен на рис.4.
Рисунок 4
Из графика рис.4 определим:
−перерегулирование σ = 521400%,
−статическая ошибка θст = 1424.
2
Время регулирования Тр нельзя определить, так как кривая переходного процесса не входит в заданный коридор.
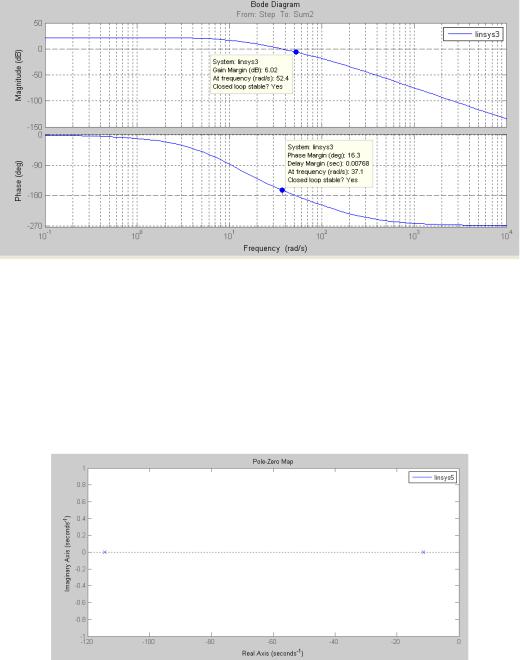
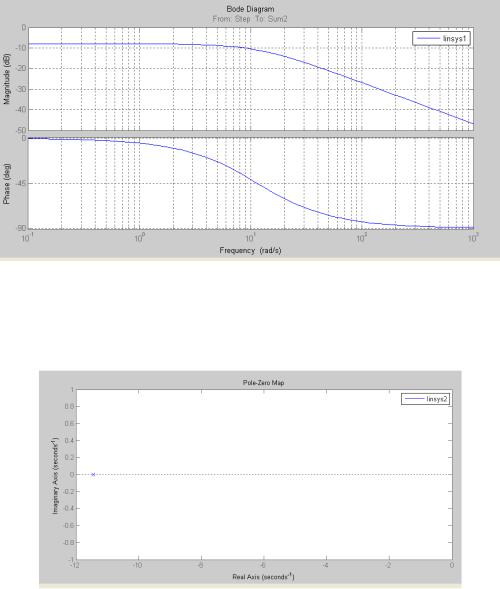
На рис.5 представлен график ЛАЧХ и ЛФЧХ разомкнутой системы.
Рисунок 5
Запас по амплитуде L = 6,02 дБ.
Запас по фазе γ = 16,3 град > 0, следовательно, система устойчива.
На рис.6 представлено распределение нулей и полюсов системы.
Рисунок 6
1.2.Расчет параметров ПИ-регулятора
Пропорциональный коэффициент: kп = 0,45kп* = 0,45*1,7624 = 0,79308
Интегральный коэффициент:
kи = 0,54kп*/T* = 0,54*1,7624/0,12 = 7,9308
3

Замкнем на схеме переключатель, соответствующий интегральной составляющей ПИ-регулятора. Переходный процесс при параметрах ПИ-регулятора kп = 0,79308, kи = 7,9308 представлен на рис.7.
Рисунок 7
Из графика рис.7 определим:
−перерегулирование σ = 520100%,
−статическая ошибка θст = 0,
−время регулирования Тр = 16,9 с.
На рис.8 представлен график ЛАЧХ и ЛФЧХ системы.
Рисунок 8
Запас по амплитуде L = 1,23 дБ
Запас по фазе γ = 2,47 град > 0, следовательно, система устойчива.
4
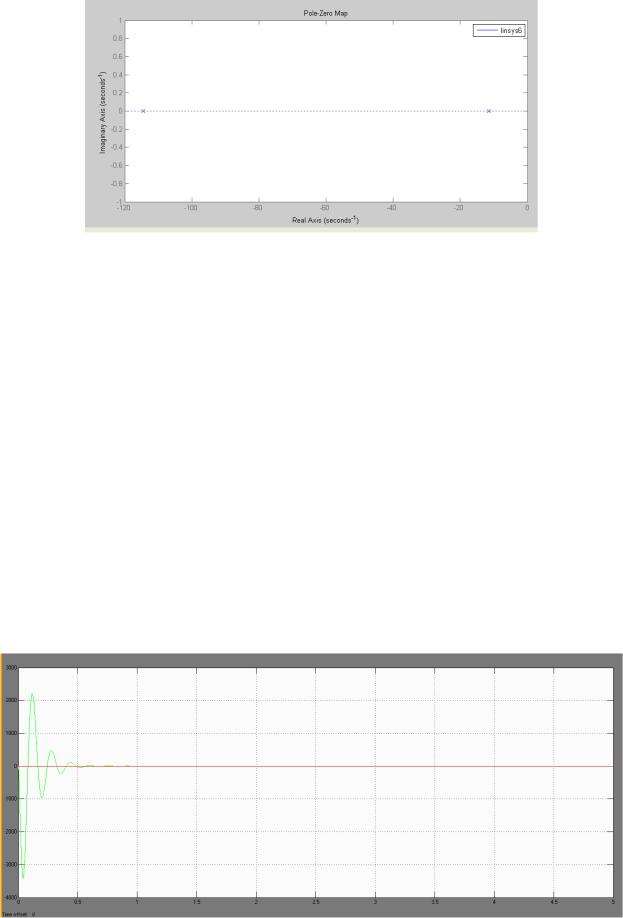
На рис.9 представлено распределение нулей и полюсов системы.
Рисунок 9
1.3.Расчет параметров ПИД-регулятора
Пропорциональный коэффициент: kп = 0,6kп* = 0,6*1,7624 = 1,05744
Интегральный коэффициент:
kи = 1,2kп*/Т* = 1,2*1,7624/0,12 = 17,624
Дифференциальный коэффициент:
kд = 0,075kп* Т* = 0,075*1,7624*0,12 = 0,01586
Замкнем на схеме переключатель, соответствующий дифференциальной составляющей ПИД-регулятора. Переходный процесс при параметрах ПИД-регулятора kп = 1,05744,
kи = 17,624, kд = 0,01586 представлен на рис.10.
Рисунок 10
5
Из графика рис.10 определим:
−перерегулирование σ = 341700%,
−статическая ошибка θст = 0,
−время регулирования Тр = 1,3 с.
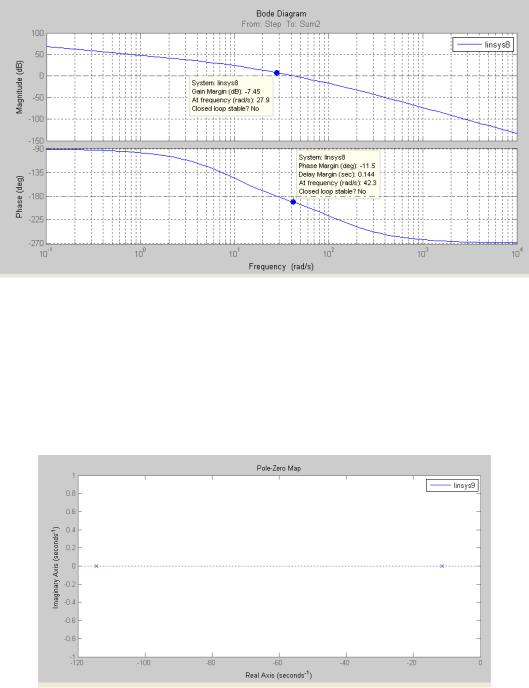
На рис.11 представлен график ЛАЧХ и ЛФЧХ системы.
Рисунок 11
Запас по амплитуде L = -7,45 дБ.
Запас по фазе γ = -11,5 град < 0, следовательно, система неустойчива.
На рис.12 представлено распределение нулей и полюсов системы.
Рисунок 12
6
1.4. Сравнение показателей качества процессов регулирования в системах с П-, ПИ-, ПИД-регулятором
Показатели качества и запасы устойчивости системы для трех видов регуляторов представлены в таблице 1.
Таблица 1
Регулятор |
θст |
σ, % |
Тр, c |
L, дБ |
γ, град |
|
|
|
|
|
|
П- |
1424 |
521400 |
- |
16,3 |
6,02 |
ПИ- |
0 |
520100 |
16,9 |
1,23 |
2,47 |
ПИД- |
0 |
341700 |
1,3 |
-7,45 |
-11,5 |
Из таблицы 1 видно, что в системе с ПИ- и ПИД-регулятором статическая ошибка равна нулю; в системе с ПИД-регулятором наименьшие перерегулирование и время регулирования, но при заданных параметрах регулятора такая система неустойчива, по сравнению с системами с П- и ПИ-регуляторами.
1.5. Поиск значений коэффициентов ПИД-регулятора, обеспечивающих наилучшее качество процесса управления
Показатели качества и запасы устойчивости системы с ПИД-регулятором представлены
втаблице 2.
Таблица 2
kп |
kи |
kд |
θст |
σ, % |
Тр, c |
L, дБ |
γ, град |
|
|
|
|
|
|
|
|
1,05744 |
17,624 |
0,01586 |
0 |
341700 |
1,3 |
-7,45 |
-11,5 |
0,5 |
1 |
1 |
0 |
92600 |
38,0 |
10 |
27,9 |
1 |
1 |
1 |
0 |
71800 |
20,5 |
4,48 |
11,7 |
1,5 |
1 |
1 |
0 |
58300 |
13,9 |
1,11 |
2,79 |
2 |
1 |
1 |
0 |
48900 |
14,6 |
-1,32 |
-3,25 |
1,5 |
1,5 |
1 |
0 |
53600 |
12,8 |
0,96 |
2,4 |
1,5 |
2 |
1 |
0 |
50100 |
12,8 |
0,80 |
2 |
1,5 |
18 |
1 |
0 |
26300 |
11,8 |
-5,92 |
-10,8 |
1,5 |
1 |
0,005 |
0 |
386200 |
16,0 |
1,11 |
2,79 |
1,5 |
1 |
0,01 |
0 |
354100 |
15,9 |
1,11 |
2,79 |
1,5 |
1 |
0,1 |
0 |
135200 |
15,5 |
1,11 |
2,79 |
1,5 |
1 |
2 |
0 |
49900 |
25,6 |
1,11 |
2,79 |
7
Из таблицы 2 видно, что с увеличением пропорционального коэффициента kп увеличивается быстродействие и уменьшается перерегулирование, однако так же уменьшаются запасы по амплитуде и фазе. С увеличением интегрального коэффициента kи уменьшается перерегулирование, однако так же уменьшаются запасы по амплитуде и фазе. С увеличением дифференциального коэффициента kд уменьшается перерегулирование.
Наилучший набор параметров ПИД-регулятора: kп = 1,5, kи = 1, kд = 1, так как при нем достигается достаточно малое время регулирования, значение перерегулирования не слишком велико по сравнению со значениями, полученными при других параметрах, статическая ошибка равна нулю, система устойчива.
8
2.Расчет параметров регулятора второго объекта с помощью второго варианта метода Циглера-Никольса
Схема САР со вторым объектом представлена на рис.13.
Рисунок 13
2.1.Расчет параметров П-регулятора
Пропорциональный коэффициент: kп = T/(τk) = 0,0874/(0,22*13,731) = 0,02893
Переходный процесс при параметре П-регулятора kп = 0,02893 представлен на рис.14.
Рисунок 14
Из графика рис.14 определим статическую ошибку θст = 0,7158, перерегулирование σ и время регулирования Тр нельзя определить.
9
На рис.15 представлен график ЛАЧХ и ЛФЧХ системы.
Рисунок 15
На рис.16 представлено распределение нулей и полюсов системы.
Рисунок 16
2.2.Расчет параметров ПИ-регулятора
Пропорциональный коэффициент:
kп = 0,9T*/(τk) = 0,9*0,0874/(0,22*13,731) = 0,02604
Интегральный коэффициент:
kи = 0,3T/(τ2k) = 0,3*0,0874/(0,222*13,731) = 0,03945
Замкнем на схеме переключатель, соответствующий интегральной составляющей ПИ-регулятора. Переходный процесс при параметрах ПИ-регулятора kп = 0,02604, kи = 0,03945 представлен на рис.17.
10