

4.2. Программа работы
Объектом исследования является система регулирования скорости двигателя постоянного тока, схема которой (в относительных единицах) приведена на рисунке. Питание двигателя осуществляется от тиристорного преобразователя. Система содержит подчиненный контур регулирования тока.
В
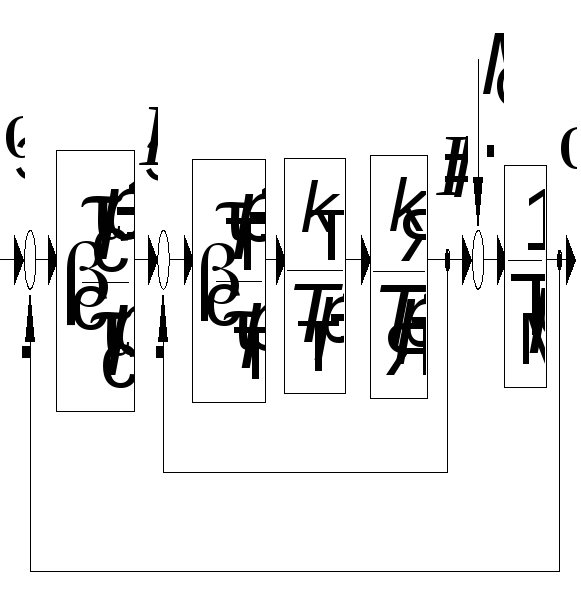
![]() и
и![]() – угловая скорость, ток, электромагнитный
момент и момент сопротивления двигателя;
– угловая скорость, ток, электромагнитный
момент и момент сопротивления двигателя;![]() и
и![]()
![]() –
задающие воздействия для скорости и
тока;
–
задающие воздействия для скорости и
тока;![]() и
и![]() – электромеханическая и электромагнитная
постоянные времени двигателя;
– электромеханическая и электромагнитная
постоянные времени двигателя;![]() – коэффициент передачи якорной цепи;
– коэффициент передачи якорной цепи;![]() и
и![]() – коэффициент передачи и постоянная
времени тиристорного преобразователя;
– коэффициент передачи и постоянная
времени тиристорного преобразователя;![]() – параметры ПИ‑регуляторов тока
и скорости.
– параметры ПИ‑регуляторов тока
и скорости.
Значения параметров объекта управления приведены в таблице.
|
Параметр |
Вариант | |||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 | |
|
|
0.004 |
0.004 |
0.005 |
0.004 |
0.004 |
0.005 |
0.004 |
0.004 |
0.005 |
0.005 |
|
|
0.01 |
0.02 |
0.04 |
0.01 |
0.02 |
0.04 |
0.01 |
0.02 |
0.04 |
0.05 |
|
|
0.1 |
0.2 |
0.4 |
0.1 |
0.2 |
0.4 |
0.1 |
0.2 |
0.4 |
0.5 |
|
|
10 |
5 |
10 |
5 |
10 |
5 |
5 |
10 |
5 |
10 |
|
|
2 |
4 |
5 |
4 |
2 |
5 |
2 |
4 |
5 |
4 |
Для выполнения работы необходимо сделать следующее:
1. Рассчитать параметры регулятора тока и далее – регулятора скорости по формулам, приведенным в 4.1, исходя из того, что контуры тока и скорости должны быть настроены, соответственно, на ОМ и СО. При расчете регулятора скорости рассматривать контур тока как апериодическое звено.
2. Исследовать динамические свойства
контура тока. С этой целью получить его
ПХ, подавая на вход контура единичное
ступенчатое воздействие
![]() .
Сделать эскиз ПХ или копию экрана,
определить
.
Сделать эскиз ПХ или копию экрана,
определить![]() и
и![]() ,
сравнить их с теоретическими значениями.
Далее, разомкнув обратную связь, получить
ЛЧХ контура тока. Определить запас
устойчивости по фазе.
,
сравнить их с теоретическими значениями.
Далее, разомкнув обратную связь, получить
ЛЧХ контура тока. Определить запас
устойчивости по фазе.
3. Исследовать динамические свойства контура скорости с идеализированным контуром тока, для чего получить ПХ системы (см. рисунок) по задающему воздействию, заменив контур тока апериодическим звеном с эквивалентной малой постоянной времени.
4. Исследовать динамические свойства
системы (рисунок) по задающему воздействию:
получить ПХ
![]() ,
определить
,
определить![]() и
и![]() ,
сравнить со значениями, полученными в
п. 3. Прокомментировать результат.
,
сравнить со значениями, полученными в
п. 3. Прокомментировать результат.
5. Определить порядок астатизма
![]() системы по возмущению
системы по возмущению![]() .
Получить ПХ
.
Получить ПХ![]() по возмущению, определить ее установившееся
значение
по возмущению, определить ее установившееся
значение![]() и время регулирования
и время регулирования![]() (задавать допуск для отклонения
(задавать допуск для отклонения![]() от
от![]() как 0.05
как 0.05![]() ).
Повторить анализ, увеличив значение
).
Повторить анализ, увеличив значение![]() вдвое и пересчитав значение
вдвое и пересчитав значение![]() .
Прокомментировать результаты.
.
Прокомментировать результаты.
4.3. Содержание отчета
Структурная схема, значения параметров объекта управления, расчет параметров регуляторов.
Передаточные функции и построенные по ним асимптотические ЛАХ разомкнутых контуров тока и скорости (в последнем случае контур тока рассматривается как апериодическое звено).
Переходные характеристики контуров тока и скорости по задающим воздействиям, значения
 и
и .
Выводы на основании сравнения с
теоретическими значениями.
.
Выводы на основании сравнения с
теоретическими значениями.Анализ порядка астатизма по возмущению. ПФ по возмущению. Значения
 и
и для двух значений
для двух значений .
Комментарии результатов.
.
Комментарии результатов.