

9
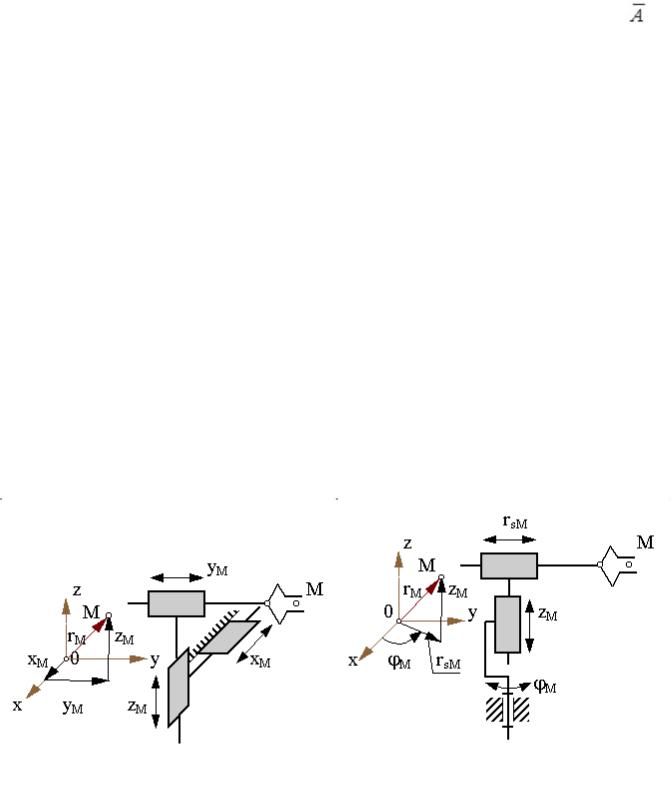
Структура кинематической цепи манипулятора должна обеспечивать требуемое перемещение объекта в пространстве с заданной ориентацией. Для этого необходимо, чтобы схват манипулятора имел возможность выполнять движения минимум по шести координатам: трем линейным и трем угловым. Рассмотрим на объекте манипулирования точку М, которая совпадает с центром схвата. Положение объекта в неподвижной(базовой) системе координат 0x0y0z0 опре-
деляется радиусом-вектором точки М и ориентацией единичного вектора с началом в этой точке. В математике положение точки в пространстве задается в одной из трех систем координат:
-прямоугольной декартовой с координатами xM, yM, zM;
-цилиндрической с координатами rsM, j M, zM;
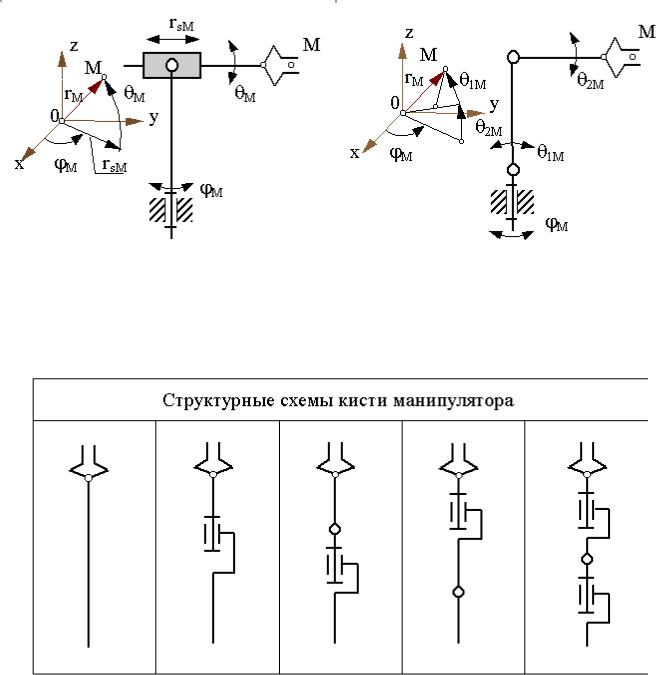
-сферической с координатами rM, j M, q M.
Перемещение схвата в пространстве можно обеспечить, если ориентировать оси первых трех кинематических пар по осям одной из осей координат. При этом выбор системы координат определяет тип руки манипулятора и вид его зоны обслуживания. По ГОСТ 25685-83 определены виды систем координат для руки манипулятора, которые приведены в табл. 1. Здесь даны примеры структурных схем механизмов, соответствующие системам координат. Структурные схемы механизмов кисти, применяемые в манипуляторах, даны в табл. 2. Присоединяя к выходному звену руки тот или иной механизм кисти, можно получить большинство известных структурных схем манипуляторов, которые применяются в реальных промышленных роботах.
Таблица 1
Системы координат «руки» манипулятора
Прямоугольная (декартова) |
Цилиндрическая |
|
|
|
|
10
Окончание табл. 1
Сферическая |
Угловая (ангулярная) |
|
|
|
|
Таблица 2
Наиболее распространена ориентация степеней подвижности представлена на рис. 5.
11
Рис. 5. Ориентация кинематических пар и рабочего органа относительно осей координат
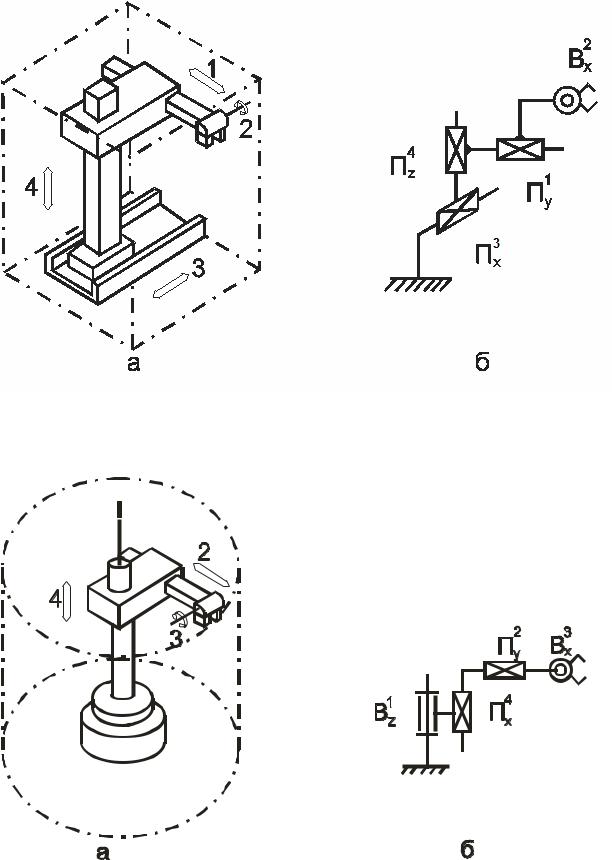
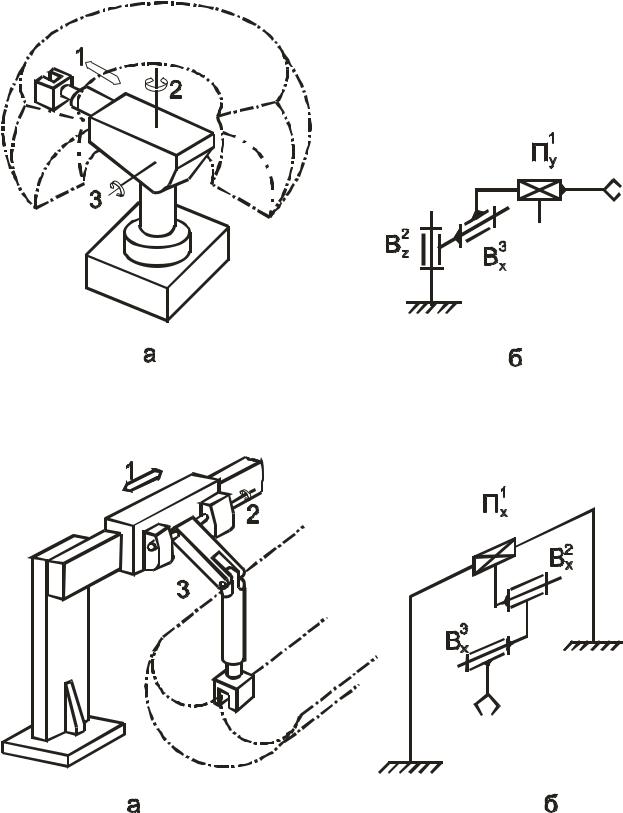
В большинстве случаев конструктивно манипулятор ПР выполняется по одной из базовых компоновок, изображенных на рис. 6 – 10. На них под буквой «б» показаны структурно-кинематические схемы, элементы которых приведены в табл. 3 и 4. Кроме структурно-кинематической схемы, каждый ПР имеет символическое обозначение (формулу), состоящее из переносных и ориентирующих степеней подвижности манипулятора. На рис. 6 ПР обладает тремя поступательными и одной вращательной (ориентирующей) степенями подвижности, поэтому его символическое обозначение (формула) 1В3П. Для робота на рис. 7 символическое обозначение 2В2П, так как имеются переносные степени подвижности – одна вращательная две поступательные, ориентирующие степени подвижности – одна вращательная. Формула роботов на рис. 8 и 9 – 2В1П. Для пятого ПР на рис. 10 символическое обозначение 4В1П.
12
Рис. 6. Конструкция ПР, работающего в прямоугольной системе координат, с рабочей зоной (а) и его структурно-кинематическая схема (б)
1 
Рис. 7. Конструкция ПР, работающего в цилиндрической системе кооринат, с рабочей зоной (а) и его структурно-кинематическая схема (б)
13
Рис. 8. Конструкция ПР, работающего в сферической системе координат, с рабочей зоной (а) и его структурно-кинематическая схема (б)
Рис. 9. Конструкция ПР, работающего в ангулярной системе координат, с рабочей зоной (а) и его структурно-кинематическая схема (б)