

2755
.pdfМинистерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Воронежская государственная лесотехническая академия»
ОСНОВЫ РАСЧЁТА СИСТЕМ АВТОМОБИЛЕЙ, ОБЕСПЕЧИВАЮЩИХ БЕЗОПАСНОСТЬ ДВИЖЕНИЯ
Методические указания к выполнению курсовой работы для студентов по направлению подготовки
190600 – Эксплуатация транспортно-технологических машин и комплексов
Воронеж 2014
2
УДК 629.33.001.6
Волков, В. С. Основы расчёта систем автомобилей, обеспечивающих безопасность движения [Текст] : методические указания к выполнению курсовой работы для студентов по направлению подготовки 190600 – Эксплуатация транспортно-технологических машин и комплексов / В. С. Волков ; М-во образования и науки РФ, ФГБОУ ВПО «ВГЛТА». –
Воронеж, 2014. – 35 с.
Печатается по решению учебно-методического совета ФГБОУ ВПО «ВГЛТА» (протокол № 5 от 31 января 2014 г.)
Рецензент заведующий кафедрой электротехники и автоматики ФГБОУ ВПО Воронежский ГАУ д-р техн. наук, проф. Д.Н. Афоничев
Ответственный редактор заведующий кафедрой автомобилей и сервиса ФГБОУ ВПО «ВГЛТА» д-р техн. наук, проф. В.С. Волков
3
Введение
Для обеспечения оптимальных режимов эксплуатации автотранспортных средств с наибольшей эффективностью для народного хозяйства, необходимо наличие специалистов данного профиля с высоким уровнем подготовки, позволяющей решать сложные технические задачи. Работа в современных условиях требует от специалистов достаточно полных знаний в части протекания рабочих процессов в системах, агрегатах и узлах, обеспечивающих безопасность движения при осуществлении транспортной работы.
К системам автомобилей, обеспечивающих безопасность движения, в первую очередь относятся системы рулевого и тормозного управления, колёсного движителя, несущей системы, а также светотехническое оборудование. В меньшей степени в обеспечении безопасности движения участвуют также агрегаты трансмиссии: сцепление, коробка передач, главная и карданная передачи, подвеска.
1. Общие указания и порядок выполнения курсовой работы
Курсовая работа по дисциплине «Основы расчёта систем автомобилей, обеспечивающих безопасность движения» выполняется на протяжении 7 семестра после изучения дисциплин общепрофессионального цикла.
Целевое направление данной курсовой работы состоит в приобретении навыков расчёта и компетенций по оценке работоспособности систем автомобилей, обеспечивающих безопасность движения. Кроме этого выполнение работы способствует развитию творческой инициативы и дальнейшему совершенствованию навыков и стремлений студентов к работе с учебниками и техническим справочным материалом. Заданием предусмотрено научить студентов самостоятельно на основании теоретических рассуждений выводить общие и рабочие аналитические соотношения с целью получения практических выводов, а также находить объективные научно-обоснованные критерии, позволяющие оценивать работоспособность систем автомобилей по удовлетворению требований безопасности движения посредством аналитического расчета и проведения эксперимента.
Всоответствии с вариантом выданного задания курсовая работа включает проведение аналитического расчёта деталей и узлов систем рулевого и тормозного управления автомобиля.
Виндивидуальном задании на выполнение курсовой работы указывается прототип автомобиля, исходные данные для расчёта, рассчитываемый узел.
Исходные данные для расчёта могут отличаться от соответствующих данных технической характеристики прототипа, в том числе и по виду рассчитываемого узла. Например, в задании может быть указан прототип автомобиля
счервячным рулевым механизмом, а в задании на курсовую работу может содержаться расчёт для этого автомобиля реечного рулевого механизма. В этом случае необходимо осуществить подбор конструкции реечного рулевого меха-
4
низма по прототипу другого автомобиля аналогичного класса и провести расчёт оценки его работоспособности для заданных условий эксплуатации.
В случае если для расчёта требуются данные, которые не указаны в задании, эти данные можно брать из технической характеристики прототипа. Список литературных источников информации приводится в конце расчётнопояснительной записки. Ссылки на такие источники приводятся в тексте в виде их цифровых обозначений в квадратных скобках, например, [1], [5].
Оформление работы осуществляется на стандартных листах формата А4 в виде рукописи или печатного текста, текст с двух сторон листа, поля 2,5 см с каждой стороны. При необходимости схемы и рисунки могут быть выполнены на масштабной бумаге и приклеены к соответствующей странице. Решение каждой задачи должно сопровождаться соответствующим рисунком, иллюстрирующим схемудействиясилимоментов, нагружающихэлементырассчитываемогоузла.
Ксерокопирование или создание скан-копий рисунков не допускается. Выполнение рисунков может осуществляться вручную, либо посредством рисования в форматах MS Word или Paint. Каждый рисунок должен иметь номер, наименование и, при необходимости, спецификацию элементов. Страницы рукописи должны быть пронумерованы, нумерация страниц сплошная. Титульный лист оформляется в соответствии с прилагаемым образцом.
Расчётно-пояснительная записка должна содержать следующие разделы.
-Титульный лист: указываются данные по прилагаемому образцу.
-Задание на выполнение курсовой работы.
-Содержание: указывается наименование разделов и подразделов с номерами страниц.
-Введение: указываются основные предпосылки для выполнения работы – текст до одной страницы.
-Расчётная часть: содержатся все проводимые расчёты по оценке работоспособности узлов автомобилей в соответствии с заданием.
-Заключение: указываются основные данные о результатах расчётов и сравнительный анализ полученных расчётных характеристик в сравнении с аналогичными характеристиками прототипа.
-Библиографический список: указывается список использованной литературы по установленной форме.
Оформление работы может осуществляться в виде рукописного текста, либо в печатном виде с использованием редактора MS Word.
При выполнении работы в печатном виде, необходимо к текстовой части приложить её электронную версию на компакт-диске.
5
Образец титульного листа
Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Воронежская государственная лесотехническая академия»
Кафедра автомобилей и сервиса
Курсовая работа
по дисциплине:
«Основы расчёта систем автомобилей, обеспечивающих безопасность движения»
Выполнил студент ……группы |
(Ф.И.О.) |
Номер зачётной книжки ……. |
|
Руководитель: |
(Ф.И.О.) |
Воронеж 201…

6
2. Расчёт рулевой системы
Исходной величиной для расчета рулевого управления является момент Мц на поворотной цапфе сопротивления повороту управляемых колес в наиболее неблагоприятных условиях: на месте на сухой шероховатой поверхности при полностью нагруженном автомобиле,
Мц = m1g (0,14ϕrк + fa),
ηц
где m1 – часть максимальной разрешенной массы автомобиля, приходящейся на управляемый мост, кг;
g – ускорение земного притяжения, g = 9,81 м/с2;
ηц – коэффициент, учитывающий потери на трение в узлах поворота цапф, обычно ηц = 0,9 … 0,95;
φ – коэффициент сцепления колес с дорогой, для рассматриваемых условий, находящийся в пределах φ = 0,75 … 0,85;
rк – радиус качения колеса, м;
f – коэффициент сопротивления качению колеса, для рассматриваемых условий находящийся в пределах f = 0,015 … 0,018;
а – плечо обкатки колеса, м.
Окружное усилие, прикладываемое водителем к рулевому колесу для преодоления момента Мц, может быть определено по выражению
Ррк = Мц η , RркUдру ру
где Rрк – радиус рулевого колеса, м; ηру – КПД рулевого управления,
ηру =ηрмηрп,
где ηрм – КПД рулевого механизма в прямом направлении, обычно находящийся в пределах ηрм = 0,75 … 0,85;
ηрп – КПД рулевого привода, обычно находящийся в пределах ηрп = 0,9 …
0,95;
Uдру – динамическое передаточное число рулевого управления,
Uдру =UрмUрп,
где Uрм – угловое передаточное число рулевого механизма; Uрп – передаточное число рулевого привода.
В соответствии с нормативными требованиями на проектирование автомобильных конструкций, усилие на рулевом колесе Ррк в условиях транспортной работы автомобиля не должно превышать 50 Н и при повороте колес на месте - 200 Н.

7
2.1. Рулевые механизмы
Рулевой механизм является механическим редуктором, осуществляющим передачу момента от рулевого колеса к валу сошки с требуемым угловым передаточным числом, определяемым по отношению угла поворота рулевого колеса αр к углу поворота вала сошки αс,
Uрм = αр .
αс
Всуществующих конструкциях величина углового передаточного числа
рулевого механизма обычно находится в пределах Uрм = 15 … 30, в отдельных случаях доходит до 40. При выборе Uрм должно обеспечиваться соответствие двух оборотов рулевого колеса из положения прямолинейного движения автомобиля (αр = 7200) повороту управляемых колес на углы θук = 35 … 40 0. С увеличением Uрм снижается усилие на рулевом колесе, однако при этом снижается чувствительность рулевого управления, что не всегда является целесообразным.
Рулевые механизмы могут быть как с постоянным, так и с переменным передаточным числом. Рулевой механизм с переменным передаточным числом
обеспечивает бóльшую величину Uрм и, следовательно, меньшую чувствительность рулевого управления при прямолинейном движении автомобиля. При по-
воротах автомобиля величина Uрм нелинейно уменьшается в зависимости от угла поворота рулевого колеса, что обеспечивает большее удобство управления автомобилем.
Конструкция рулевого механизма должна обеспечивать как можно более
высокий КПД в прямом направлении ηпр при передаче усилия от рулевого колеса к сошке и несколько меньший – ηобр в обратном направлении для снижения толчков от дороги на рулевом колесе.
Взависимости от конструктивного исполнения рулевые механизмы могут
быть:
- червячные: рабочая пара «червяк-ролик»; - реечные: рабочая пара «рейка-зубчатый сектор»;
- комбинированные: рабочие пары «винт-шариковая гайка» + «рейказубчатый сектор».
Червячные рулевые механизмы при наличии ведущего элемента в виде глобоидального червяка имеют переменное передаточное число, обладают КПД
впрямом направлении ηпр = 0,85 … 0,88 и в обратном направлении ηобр = 0,45 … 0,55. При этом из всех рассматриваемых типов рулевых механизмов червячные механизмы обладают наименьшей жесткостью, что предопределяет их работу в сочетании с относительно жесткими в боковом направлении шинами, как правило, с диагональным расположением корда.
Реечные рулевые механизмы имеют постоянное передаточное число, обладают КПД в прямом направлении ηпр = 0,8 … 0,85 и в обратном направлении
8
ηобр = 0,5 … 0,6. В сравнении с червячными рулевыми механизмами реечные механизмы обладают большей жесткостью, что предопределяет их работу в сочетании с более эластичными в боковом направлении шинами, как правило, с радиальным расположением корда.
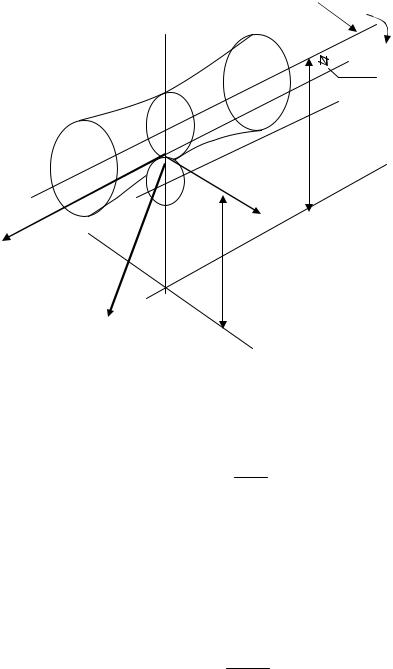
2.1.1. Расчёт червячного рулевого механизма
Исполнительными элементами червячного рулевого механизма являются цилиндрический или глобоидальный червяк и двухили трехгребневый ролик, управляющий углом поворота вала сошки.
ось червяка
Мрк
ro
ось ролика
аωч
Рч
Qч
Ro
No
ось вала сошки
Рис. 2.1. Схема к расчету червячного рулевого механизма
Оценка работоспособности рабочих поверхностей червяка и ролика производится по контактным напряжениям сжатия
σсж = Qч , Fчр
где Qч – осевая составляющая силы на червяке, Н;
Fчр – площадь контакта зубьев червяка и ролика, м2. Осевая сила Qч может быть определена по формуле
Qч = Рчtgβч,
где Рч – поперечная составляющая силы на червяке, Н;
Рч = Мr0рк ,

9
где Мрк – момент, прикладываемый водителем к рулевому колесу, Нм;
rо – радиус делительной окружности червяка по наименьшему сечению, м; βч – угол наклона винтовой линии червяка к поперечной плоскости. Необходимым условием совместной работы червяка и ролика является
равенство их окружных шагов. При этом окружной шаг является постоянной величиной, а переменными являются радиус червяка rо и угол наклона винтовой линии червяка βч. В существующих конструкциях автомобилей отечественного производства угол βч обычно находится в пределах 8 … 10 0.
Передаточное число рулевого механизма с глобоидальным червяком является переменным и может быть определено по выражению
Uрм = |
R0 |
= |
аω −r0 |
, |
r0tgβч |
|
|||
|
|
r0tgβч |
||
где аω - межцентровое расстояние между осями вращения червяка и вала сошки есть сумма радиуса червяка r0 и радиуса поворота ролика Ro
аω = R0 + r0 .
Площадь контакта зубьев червяка и ролика может быть определена по формуле
|
i |
[(sinϕ |
ч |
−sinϕ |
р |
) (r2 |
+r2 )] |
|
|
F = |
р |
|
|
ч |
р |
, |
|||
|
|
|
|
|
|
|
|
||
чр |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где iр – число гребней ролика, обычно iр = 2 или 3;
φч и φр – центральные углы контакта, соответственно, червяка и ролика,
обычно φч = 30 … 450; φр = 45 … 600;
rч и rр – наружные радиусы, соответственно, червяка и ролика, м. Наружный радиус червяка rч может быть определен по зависимости
rч = r0 +(0,2...0,25)tч,
где tч – шаг червяка, определяемый величиной передаточного числа рулевого механизма,
tч = 2πR0 .
Uрм
Радиус поворота ролика обычно находится в пределах Ro = 35 … 50 мм. Наружный радиус ролика обычно составляет
rр = (1,25...1,30)rч.
Для изготовления червяка и ролика применяются стали типа 20ХНМ; 12Х2Н4А; 20ХГНТР с последующей нитроцементацией рабочих поверхностей на глубину 0,7 … 1,6 мм, имеющие характеристику допускаемых напряжений сжатия [σсж] = 850 … 1000 МПа.
10
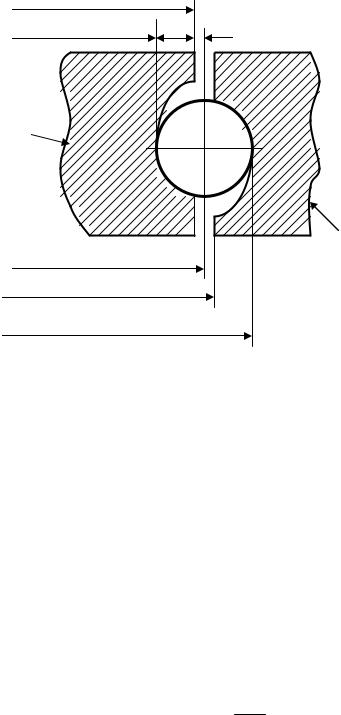
2.1.2.Расчёт рабочей пары «винт-шариковая гайка»
Всоединении рассматриваемого типа ведущим элементом является одно-
заходный винт с постоянным шагом, находящимся в пределах tв = 12 … 18 мм и углом подъема винтового канала βв = 10 … 15 0. Для передачи усилия на ведомую гайку используются шарики диаметром dш = 7 … 9 мм.
d |
|
|
d1 |
hж |
х |
Винт |
|
|
Гайка
d0 D
D1
Рис. 2.2. Схема к расчету рабочей пары «винт-шариковая гайка
Радиус желоба rж винта и гайки для исключения заклинивания шарика должен быть больше его радиуса и, так же, как в конструкции радиальноупорного подшипника, необходимо соблюдение зависимости
rж = (0,51 … 0,53)dш.
В соответствии с этим внутренний d1 и наружный d диаметры желоба винта, а также внутренний D и наружный D1 диаметры желоба гайки могут быть определены из следующих соотношений:
d1 = d0 −2(rж − х); |
d =d1 +2hж; |
D1 = d0 +2(rж − х); |
D = D1 −2hж, |
где hж – глубина желоба, м;
х – смещение центра профилей желобов винта и гайки относительно линии центров шариков и среднего диаметра винтового канала d0, м,
х = rж − d2ш cosαш,