

2.2. Определение степени подвижности и класса плоских рычажных механизмов
Для определения степени подвижности любой кинематической цепи необходимо подсчитать число степеней свободы всех подвижных звеньев, полагая их не связанными между собой. Затем нужно вычесть из полученного числа число связей, наложенных на звенья кинематическими парами. Степень подвижности пространственной цепи определяется по формуле Сомова-Малышева:
W = 6n 5p5 4p4 3p3 2p2 1p1,
|
(2.1) |
где 6n число степеней свободы n звеньев без учета связей;
5p5, 4p4, 3p3, 2p2, 1p1 число связей, наложенных на звенья парами 5, 4, 3, 2, 1-го классов соответственно.
Степень подвижности плоской цепи, состоящей из пар 4-го и 5-го классов, определяется из формулы подвижности для пространственной цепи без кинематических пар 3, 2 и 1-го классов по формуле Чебышева:
W = 3n 2p5 1p4; (2.2)
где n количество подвижных звеньев;
3 степень подвижности каждого звена на плоскости;
p 4, p5 количество кинематических пар 4-го и 5-го класса соответственно;
1, 2 числа условий связи, накладываемых кинематическими парами 4-го и 5-го класса соответственно.
Физический смысл подвижности механизма состоит в том, что она показывает количество ведущих звеньев, необходимых для того, чтобы кинематическая цепь стала механизмом.
Любой механизм должен иметь одно неподвижное звено стойку, одно или несколько ведущих звеньев и кинематические цепи, подвижность каждой из которых равна нулю.
Кинематические цепи, имеющие нулевую подвижность, называются структурными группами, или группами Ассура (рис. 2.4).
Класс группы определяется наивысшим классом контура, образуемого звеньями группы. Группы Ассура 2-го класса приведены на рис. 2.4, а, б, 3-го класса на рис. 2.4, в, г.
Для определения класса механизма необходимо разделить его на группы Ассура, начиная с самой удаленной от ведущего звена группы 2-го класса, каждый раз проверяя степень подвижности оставшегося механизма, которая не должна изменяться, если отсоединение выполнено верно. Если подвижность изменилась, значит, надо отсоединить группу более высокого класса, вновь проверить подвижность и т. д., пока не останется одно ведущее звено. По наивысшему классу групп Ассура определяется класс механизма (рис. 2.5, 2.6).
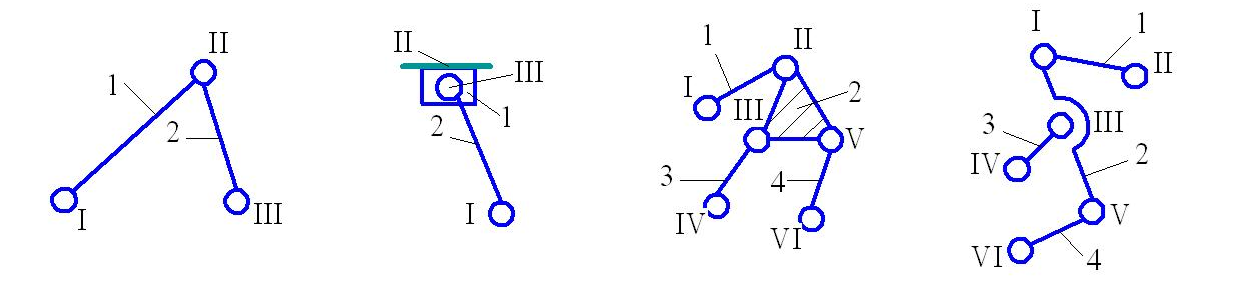
а б в г
Рис. 2.4
|
|

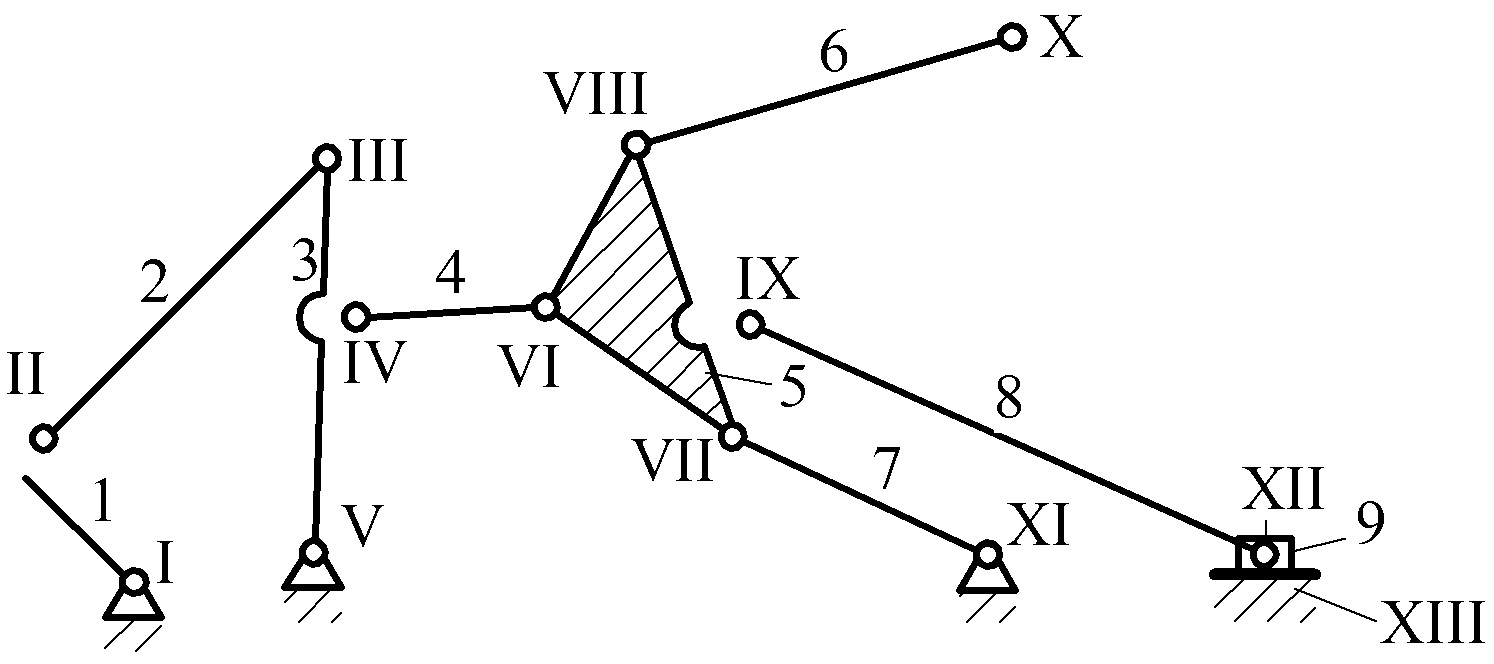
Рис. 2.5 Рис. 2.6
Пример. Определить подвижность механизма, схема которого приведена на рис. 2.5.
Воспользуемся формулой Чебышева:
W = 3n 2p5 1p4;
при n = 9; p5 = 13; р4 = 0
![]()
Назначаем ведущим звено № 1.
Данный механизм разделяем на группы Ассура, начиная с самой удаленной от ведущего звена (см. рис. 2.6).
Таким образом, в состав механизма входят одно ведущее звено (1), двухповодковая группа Ассура 2-го класса (2, 3), трехповодковая группа 3-го класса (4, 5, 6, 7), двухповодковая группа 2-го класса (8, 9) (см. рис. 2.6). Итак, имеем механизм третьего класса.
Структурная формула данного механизма записывается в порядке присоединения групп Ассура, начиная с ведущего звена:
12; 34; 5; 6; 78; 9.