Шпоры_2011
.doc|
1. Общие сведения об ЭМПП. П.П. в Эл. системе характеризуется совокупностью Эл. магнитных и мех. изменений в системе которые взаимосвязаны и представляют между собой единое целое. Часто П.П. делят на 2 стадии: 1. из-за большой инерции вращающихся машин в ЭС преобладают Эл. магнитные изменения к-ые длятся от нескольких сотых до 0,1 сек. 2. длится от 0,1 до 0,2 сек. и более. 1 стадию называют электромагнитным пп, 2 стадия проявляет механические св-ва системы которое оказывает существенное влияние на пп. Эта стадия называется электромеханическим пп. ЭС проектируемые для работы в установившихся условиях (режимах) для которых определяются их технико-экономические характеристики в любом установившемся режиме его параметры (ток U, f) непрерывно изменяются под воздействием каких либо причин которые называются возмущающими воздействиями создающими начальное отклонение параметров режима - возмущение режима. Нормальный пп сопровождает текущую эксплуатацию системы при которой всегда имеются некоторые возмущения воздействия вызывающие малые возмущения режима . например изменение нагрузки, при этом нерерывно осущ. свои действия регулир. условия. Малые возмущения не должны вызывать нарушения устойчивости системы т.е. не должны приводить к прогрессивно возрастающим изменениям параметров его исходного режима. По отношению к малым возмущения вводят понятия статической устойчивости - способность системы восстанавливать свое исходное состояние исходный режим после малого его возмущения. Нормальный пп при больших возмущениях и аварийном пп возникают вследствие резких и существенных изменений режима системы: при КЗ в системе и последующих их откл. пр- саач изменение сх. соед. систмеы по отношению к ним вводят понятие динамической устойчивости - способность системы восстанавливать исходное состояние после большого возмущения. Если в результате большого возмущения синхронная работа системы нарушается и это приводит к появлению асинхронного хода в какой либо его части системы а затем после некоторого допустимого по условию эксплуатации перерыва режим восстанавливается то тогда говорят о результирующей устойчивости. Длительность Эл. мех процессов > Эл. магн. процессов и значит превосходит время распространения в пространстве изменяющихся величин (U,I,f) характерезующих эти процессы и в большинстве случаях м/о рассматривать как процессы в цепях с сосредоточенными постоянными, ак Эл-ты Эл.эн сети хар-то т-ко (Эл-ты) парамертрами с сосредоточенными парамнтрами.
2. Основные соотношения в 3-х ф цепи. Система о.е. При равномерной нагрузке токи в проводах одинаковы, и сдвинуты относительно фазных напряжений. Поэтому расчет и сх.замещ строятся для 1-й. ф. Напряжения: U=U’+jU”=Ue-jψu, где U’-активная составляющая напр. jU”-реакт составляющая напр. U-модуль напр. ψu -угол сдвига фаз. При расчетах устойчивости системы напр балансирующего узла принимаем Uб =U, ψ б=0 Ток: I=I’+jI”=Ie-jψi, где ψi-угол между фазами тока, φ= ψu- ψi, где φ-угол сдвига фаз между U и I.
Полная
мощность:S.=3Uф.
I*
= Сопротивление продольных элементов ЭС: Z=UФ/I= U/корень3I=R+jX При расчетах часто используют систему о.е где базисными принимают мощность и напряжение. При этом базисное напряжение приводят к каждой ступени трансформации. Sб=UбIб; ZБ=UБ/ корень3IБ. Мощность в 3-х ф в о.е
Таким образом в о.е выражение для мощности отсутствует множитель корень3. Для анализа ПП необходимо принять и tБ – время в течении которого ротор вращается с синхронной скоростью повернется на 1рад.
ω0* tБ=1;
t*=t/
tБ=
ω0
9. Основные требования предъявляемые к режимам электрической системы. К нормальному режиму, который является установившимся, предъявляются следующие основные требования: 1. Качество, то есть снабжение потребителей электрической энергии осуществляется по установленным нормативам. 2. Надежность – это снабжение потребителей электрической энергией без перерыва и снижение ее качества длительнее, чем для данной системы и данного вида потребителей это предусмотрено соответствующими нормативами (устойчивое сохранение заданного режима – устойчивость). 3. Экономичность – это надежное снабжение потребителей энергией, удовлетворительного качества при возможно меньших затратах. Эти требования при расчете переходного процесса сводятся к проверке следующих условий: 1. Осуществимость режима, который должен наступить после затухания переходного процесса. 2. Устойчивость перехода от одного режима к другому и устойчивость режима после переходного процесса. 3. Удовлетворительные качества переходного процесса. 4. Проверка экономичности мероприятии, обеспечивающих осуществимость и качества переходного процесса, а также устойчивость.
|
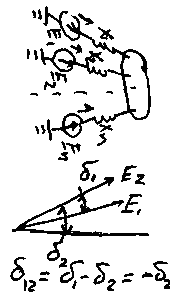
3. Уравнение движения ротора СМ
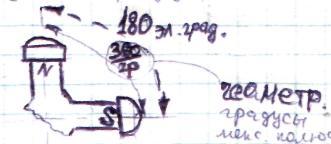
Угол поворота
ротора обычно задается в электрических
радианах, но иногда все величины
записывают в о. е. и угол выражают в
электрических градусах. Геометрический
градус между полюсами: 360/ 2р. δэл /
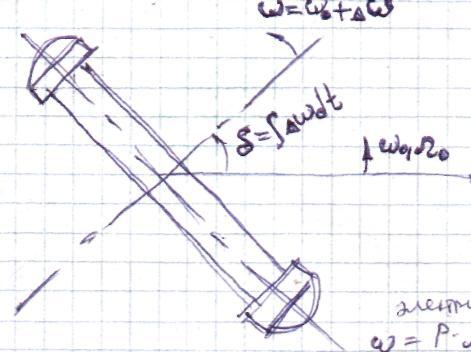
δгеом= 180*2р/360=р, δэл=рδгеом. При вращении
ротора различают его абсолютную
механическую скорость Ω, определяемую
как производную геометрического
смещения (выраженного в геометрических
углах) ротора по времени dθ/dt и абсолютную
электрическую скорость ω= dδ/dt, δ и θ
отсчитываютя от неподвижной оси.
Электрическая и механическая скорость
связанны ω= рΩ, Скорость ротра (∆ω) по
отношению к синхронно-вращающейся
оси определяется как разность
фактической электрич. скорости (ω) и
синхронной скорости (ω0). dδ/dt= ∆ω= ω-
ω0; ω= ω0+dδ/dt, ускорение ротора
характеризуется соотношением: α=
d∆Ω/dt= (∆МΩ02)/2(J
Ω02/2)=
∆МΩ02/Тj;
Тj- постоянная инерции(Вт*сек), τ Ω02/2
– кинетич. энергия, запасенная ротором.
∆М=∆Р/ Ω0; d∆ω/dt= d2δ/dt2=∆Рω0/Тj;
разделим на базисную мощность:
d2δ/dt2=(∆Р*)ω0/Тj;
Р*-
в о. е., δ-рад, Тj-сек, (d2δ/dt2)Тj/ω0=
Р0*-
Рмах*sinδ,
Р0-мощность турбины, Рмах- макс. активная
мощность, выдаваемая Г-м. Тj численно
равнв времени разгона tразг ротора
Г-а от неподвижного состояния до
синхронной скорости при условии, что
на ротор действует постоянный момент
сопротивления. δ=f(t) – уравнение
движения ротора Г-а. Его функция дает
картину изменения угла δ во времени,
позволяет судить об устойчивости Г-а
6. Характеристика мощности синхронного генератора с АРВ пропорц.
В г-рах, ток
возбужд. н-ых не регулир. Eq
пр любых медленных изменениях наргузки
- Р остается постоянным остальные
параметры режима характерезующие
работу г-ра Uг,Eq’,δ
и т.д. изменяется при изменении нагрузки
в этом случае U
и результир. Потокораспределение
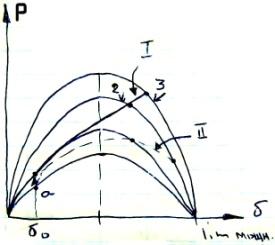
Eq’ падает с ростом нагрузки. Современные г-ры как правило имеют АРВ которые контролируют Uг. При понижении этого U АРВ поднимает ток возбужд. а вмете с ним и ЭДС Eq до тех пор пока не восстановит Uг. Т.к изменяется Eq изменяется и характеристика мощности СМ ЭДС г-ра будет повышатся с увеличением угла δ.
С ростом нагрузки режим переходит в тч. новых установившихся режимов 1,2,3. Кривая 1 - при сильном регулировании обеспечивает постоянство Uг, 2 – при постоянстве регулир. потокосцепления обм. возбужд. пропорциональна ему Eq’ с регулятором пропорционального типа – РПТ. СГ с таким АРВ не на много выше lim мощности не регулируемого г-ра это связано с тем что при возрастании выдаваемой мощности в некоторых точках характеристики 2 начинается самораскачивание СГ и переодические колебания с увеличением амплитуды приводят к выпадению СГ из синхронизма. СГ снабженный РПТ м/б представлен в схемах замещения переходным сопротивлением Xd’ и Eq’ т.о. мы рассматриваем 2 наиболее существенные характеристики. Статическая характеристика - отвечает случаю когда при изменении режима остается постоянный ток возбуждения т.е. Eq=const что имеет место при медленных изменениях режима не регулир. Машины. Динамическая характеристика – получается при постоянстве ЭДС Eq’= const соответствует постоянству регулир потокараспределению оби. возбужд. по продольной оси.
9. Основные требования предъявляемые к режимам электрической системы. К нормальному режиму, который является установившимся, предъявляются следующие основные требования: 1. Качество, то есть снабжение потребителей электрической энергии осуществляется по установленным нормативам. 2. Надежность – это снабжение потребителей электрической энергией без перерыва и снижение ее качества длительнее, чем для данной системы и данного вида потребителей это предусмотрено соответствующими нормативами (устойчивое сохранение заданного режима – устойчивость). 3. Экономичность – это надежное снабжение потребителей энергией, удовлетворительного качества при возможно меньших затратах. Эти требования при расчете переходного процесса сводятся к проверке следующих условий: 1. Осуществимость режима, который должен наступить после затухания переходного процесса. 2. Устойчивость перехода от одного режима к другому и устойчивость режима после переходного процесса. 3. Удовлетворительные качества переходного процесса. 4. Проверка экономичности мероприятии, обеспечивающих осуществимость и качества переходного процесса, а также устойчивость.
|
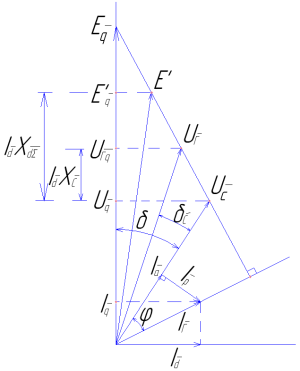
4. Основные характеристики неявнополюсного синхронного генератора. Рассмотрим простейшую электроэнергетическую систему – синхронный генератор, работающий на сеть неизменного напряжения и частоты.
Построим векторную диаграмму для неявнополюсного С.Г.
На векторной диаграмме выделены характерные ЭДС Eq, E’ и E’q. ЭДС холостого хода Eq пропорционально току возбуждения СМ, если не учитывать насыщение. При резких изменениях режима эта ЭДС также резко изменяется, повторяя ток ротора. E’ обусловлена результирующим полным потокосцеплением в обмотке возбуждения. E’q, ее поперечная составляющая, остается неизменной при любом резком изменении режима работы генератора. Эта переходная ЭДС не имеющая физического смысла и являющаяся расчетной величиной, широко применяется при анализе переходного процесса. Её неизменность E’q = const в момент резкого изменения режима позволяет связать режим системы до нарушения с режимом после нарушения.
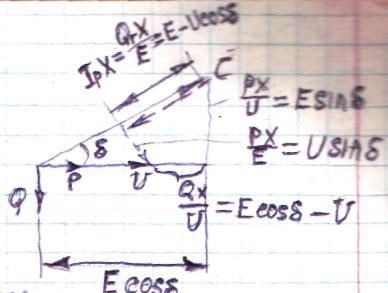
Из векторной
диаграммы следует, что
где Ia = I cosф – активная составляющая тока генератора. Получим выражение для мощности генератора
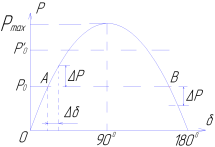
При Еq и U постоянных, δ определяется только его активной мощностью, которая в свою очередь определяется мощностью турбины.
Заданному значению мощности турбины соответствует две точки характеристики А и В, в которых мощности генератора и турбины уравновешивают друг друга. В точке А пусть мощность генератора по какой-либо причине измениться на величину ∆Р и положительное изменение ∆Р соответствует приращению ∆δ по синусоидальной зависимости. Поскольку тормозящий момент генератора преобладает над вращающим моментом турбины, то под его влиянием ротор начнет замедляться в сторону уменьшения угла δ и в точке А устанавливается исходный режим. Если в точке В при уменьшении SГ на валу возникает ускоряющий избыточный момент турбины, то угол δ возрастает. Возникает лавинообразный процесс выпадения генератора из синхронизма. Если в точке В возникает тормозной избыточный момент, то есть SГ увеличивается, то это вызывает перемещение рабочей точки в точку А, следовательно, точка В неустойчивое положение.
Схема замещения неявнополюсной синхронной машины.
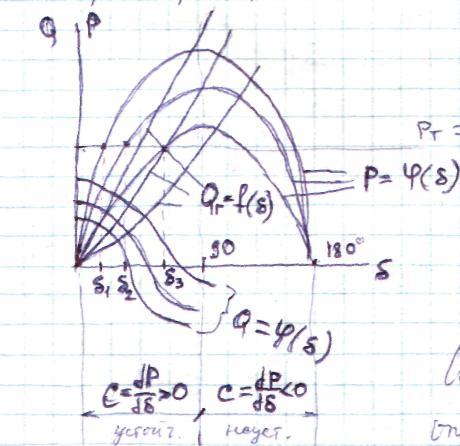
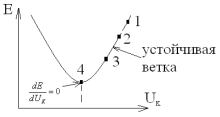
11. Качество П.П. Динамический переход от 1 режима к другому подвергается качественной отценке при этом отценивается характер протекания П.П. (быстро, медленно, апериадически, монотонно) и характер нового уст. ПП. Быстрое затухание пп, апериодичность или хотя бы монотонность в большинстве случае авт. регулирования считаются показателем хорошого качества пп. Режим наступающий после пп должен иметь достаточный запас устойчивости который должен иметь достаточный запас устойчивости который проверяется измерением какого либо параметра. Наибольшая величина отклонения при которой систем а оставляет устойчивость определяет запас устойчивости выраженный коэф. запаса. Например: Ku=U-Uкр/Uo – запас по U. Kр=Pmax-Pкр/Ро запас по Р. Формальным признаком статической учтойчивости ЭС может служить знак приращения мощности к приращению угла dP/dδ>0 если усл. выполняется то простейшая система устойчива. Повышение мощности ТУ от Р0 до Ро’ приводит к возрастанию от δо до δо’ и уменьшению запаса стат. устойчивости. Запас устойчивости Эл. передачи связывающий станцию с шинами ЭС должен быть >=20% в н.у. и соотв. >=8% в кратковременном послеаварийном режиме.
|
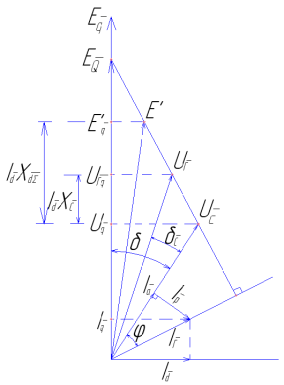
5. Основные характеристики явнополюсного синхронного генератора. Рассмотрим простейшую электроэнергетическую систему – синхронный генератор, работающий на сеть неизменного напряжения и частоты.
Построим векторную диаграмму для явнополюсного С.Г.
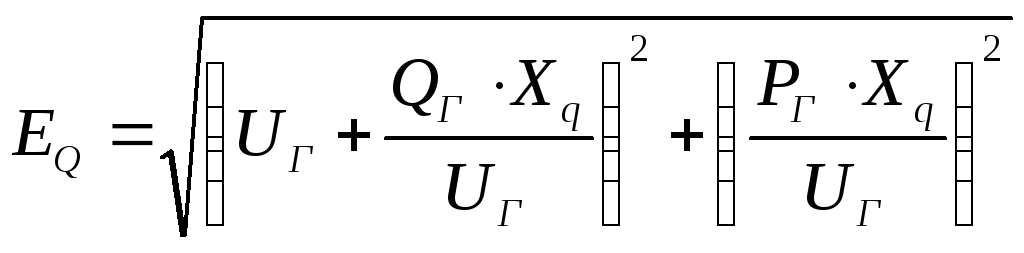
Фиктивная
расчетная ЭДС EQ
не имеет физического смысла. Она
позволяет искусственно ввести в схему
замещения системы явнополюсную СМ,
которая не имеет обычную схему замещения
в виде постоянных сопротивлений и
ЭДС, приложенных к ней. Схема замещения
содержит EQ,
зависящая от режима и приложенная за
постоянным сопротивлением Xq.
Если оперировать Eq,
то она будет приложена за зависящим
сопротивлением от режима
Из векторной диаграммы следует, что
Характеристика мощности явнополюсной СМ, кроме основной синусоидальной составляющей, содержит sin2δ.
1 – Р = f (δ); 2 – sinδ; 3 – sin2δ При расчетах электромеханических переходных процессов с синхронной машиной явнополюсную заменяют неявнополюсной с сопротивлением Xq по обоим осям и ЭДС ЕQ.
Схема замещения явнополюсной синхронной машины.
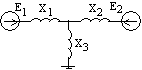
8. Методы определения собственных и взаимных проводимостей. 1. Метод преобразования сети. Основан на приведении схемы замещения системы к виду мноугольника с диагоналями и нагрузочными сопротивлениями в узлах. Используют метод преобразования треугольник в звезду и звезду в треуг., замена многолучевой звезды многоугольником, разрезание сети по балансирующему узлу. 2. Метод единичных токов. Предполагает, что в ветви i приложена некоторая эдс протекает ток Iki=1. Определяем падение напряжения в ветви k: ∆Uk= IkiZk. Далее произведя токораспределение находим токи и напряжения во всех ветвях, а также Iii, Еi. Yki=1/∆Еi, Yii= Iii /∆Еi. 3. Метод эквивалентного 4-хполюсника. Дана двухмашинная система с промежуточными нагрузками.
Р1=Е12Y11sinα11+ Е1 Е2 Y12sin(δ12-α12), Q1= Е12 Y11cosα11- Е1Е2 Y12cos(δ12-α12), При рассмотрении системы примем, что станция 2 является системой с ∞ мощностью, при этом Е2= const. Предположим r=0, кси=90, α=0, Р1= Е1 Е2 Y12sinδ= Рмах sinδ, Q1= Е12 Y11- Е1Е2 Y12cosδ; Рмах = Е1U Y12. Наиболее часто Т-образная сх.
1/ Y12=Х12= Х1+Х2+ (Х1Х2)/Х3, Рмах = Е1UY12 Предположим есть актив. сопротивление
Р11= Е2Y11sinα11; Y11= Y22= Y12= Y=1/(r+jx)=Ye-jψ; ψ=arctg(x/r), α = (π/2) – ψ; Р= Е2Ysinα + ЕUYsin(δ-α)
|


|
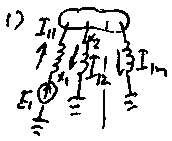
7. Х-ка мощности сложной системы. Система где имеется больше 2-х станций, мощность каждой станции зависит от модуля и сдвига ф.
Воспользуемся методом наложения согласно к-му ток протикает по обм. ген. и сх можно разбить на n режимов.
ток I11 представляет собой ток который протекал бы по обм. ген. и ЭДС ген = 0, и цепи этих генераторов оставались замкнуты на землю.
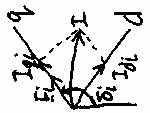
I1=I11-I12-…-I1n, токи вызаваются в первой ветви. Т.к все линейно можно записать: Ii= -Yi1E1 – Yi2E2 – Yi(i-1)Ei - … - YinEn Если обозначить фазовые углы Ei через δ а аргумент собств и взаимные сопротив Zn=1/Y11, то Ii=Eiejδjyiiejαii+∑Ekejδkjyikejαik.
Комплексное значение мощности определяется произведением произведение сопряженных комплекса токов на комплексное сопряженное ЭДС: Si=-EiE1Yi1-…-EiEiYii-…-EiEnYn. С учетом полученных выражений Si=Yi1(-Ei)E1ej(δi1+ψi1) - …+Ei2Yiiejψii-…-EiEnYinej(δin+ψin) и тригонометрической форме….
Из формул видно что расчет мощности отдаваемой ген в систему необходимо ЭДС от генератора и их аргументов, а также комплексное сопротивление и взаимные проводимости.
12. Практические критерии статической устойчивости. 1)Статическая устойчивость есть состояние в к-х система получив случайное возмущение стремиться восстановить исходный или близкий к нему режим. 2)Стат устой как свойство постепенно ухудшающего режима противостоять к малым до нек-го предельного режима. Для обеспеч устой ЭС должна работать с нек-м запасом Кз=Pm-Po/Po>1. Для определения коэф запаса необходимо определить придельный режим и критические параметры. Критические условия м-но записать ∆W/∆П>∆Wг/∆П или d(W-Wг)/dП<0 ∆W-дополнительный расход эн в системе, ∆Wг- дополнительная эн в ген, ∆П- изменение определяющего параметра. В практике первоначальная задача определить с неполными эс, а с нек-ми зависящих от нее величинами выбираемыми из практич соображений для каждой практической критерии устойчивости. С практической точки зрения необходимо знать зависимость параметров режима от времени. Малые возмущения могут привести к статически неустойчивой энергосистеме к возрастающему увеличению параметров в виде медленно самопроизвольного изменения (сползания, текучести) параметров режима. С практической точки зрения нет необходимости знать зависимость параметров режима от времени а достаточно ответить на вопрос устойчив режим или нет и каков запас устойчивого режима. Для выявления условий возникновения параметров текучести режима необходимо рассмотреть уравнения характеризующие установившийся режим и исследовать эти уравнения при допущении о малых отклонениях каких-либо параметров режима. При этом часть параметров будет фиксированной а часть изменяемая. |
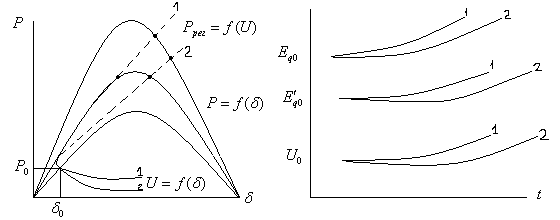
10. Осуществляемость режима. Режим, который должен установиться после возмущения и последующего переходного процесса, обусловлен балансом мощности. Активная мощность, вырабатываемая генераторами системы РГ, должна быть равна мощности, поглощаемой в нагрузках РН и теряемой во всех элементах системы ∆Р: РТ = РН + ∆Р = Р. В цепях переменного тока такое же условие и для реактивной мощности: QТ = QН + ∆Q = Q. Активная и реактивная мощности связаны соотношением: S2 = P2 + Q2. Известно, что: 1. Изменение активной мощности вырабатываемой генератором главным образом влияет на изменение частоты в системе, оказывая небольшое влияние на напряжение. 2. Изменение реактивной мощности, выдаваемой устройствами и ее генерирующими, влияет главным образом на изменение напряжения в системе. Необходимость баланса активной и реактивной мощностей приводит к следующему правилу. В установившемся режиме графические зависимости РГ = f1(П), Р = f2(П) всегда имеют общую точку, пересекаясь между собой или хотя бы касаясь друг друга. При этом QГ = ψ1(П) и Q = ψ2 (П) также имеют общую точку при одном и том же параметре режима П = П1 для Р и Q. Такой графоаналитический способ определения параметров установившегося режимов широко применяется на практике.
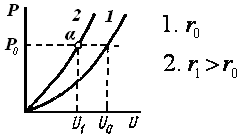
Предположим, что нагрузка генератора нелинейна и сделаем предположение, что она уменьшается. В качестве параметра возьмём напряжение U в точке Н. П → U.
Рассмотрим какие параметры будет иметь новый установившийся режим если Р0 = const, X = const. Уменьшение нагрузки возможно только за счёт активного сопротивления. Точка α указывает на значение напряжения, которое должно установиться если режим будет существовать, т.е. для этого необходимо соблюдать баланс реактивной мощности, который соблюдался при U0.
Характеристики реактивной мощности пересеклись в точке β. При U1 эти хар-ки не пересекаются, поэтому при P0 = const и r = r1 режим не может существовать. Для его существования необходимо изменить реактивную мощность QГ и точку подключения нагрузки, уменьшив направляемую Q. Это можно достичь уменьшив возбуждение генератора или подключить дополнительную реактивную нагрузку.
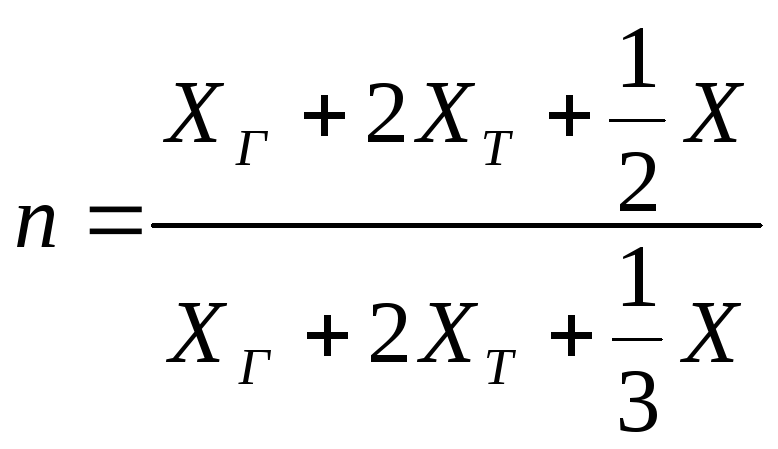
Станция связана с шинами неизменного по величине и частоте напряжения трехцепной электропередачей. Предположим одна цепь отключилась.
Сопротивление между точками 1 и 2 выросло в
Следовательно в n раз уменьшится максимум хар-ки P = Pmaxsinδ, которая в этом случае не пересечется с хар-кой РГ=Р0=const.Сл-но, существование режима будет невозможно.
Таким образом после изменения параметров системы изменяется параметр режима, который становится осуществимым, если имеется возможность свободного изменения реактивной мощности.
17 Применение практических критериев устойчивости Рассм. применение критерия d∆Qгн /dUк , который обычно применяется при устойчивости с-мы, имеющей узловую точку. В кач-ве узловой точки можно выбрать любую точку на ЛЭП. Пусть точка к делит в сх.с-мы реактивность всех с-м: X1, X2; X=X1+X2 Предположим, в с-ме передаваемая мощность активная P=const и с-ма за счет изменения Uк подходит к предельному режиму Uк=var δ= δ1 + δ2 —› 900 P=Е эU/x=Е эU/X1+X2 тогда δ1 = 900 - δ2 δ2 = 900 – δ1 Запишем sin δ2 = cos δ1; sin δ1 = cos δ2 в соответствии с этим запишем: sin δ1=PX1/ Е эUк = (Е эU/X1+X2)*X1/ Е эUк =U/Uк*(X1/(X1+X2)) sin δ2=PX2/ U*Uк = (Е эU/X1+X2)*X2/ U*Uк =Е э/Uк*(X2/(X1+X2)) cos δ1= Е э/Uк*(X2/X1+X2); cos δ2= U/Uк*(X1/X1+X2) Реактивные мощности, поступающие с мощности генерации в точку к и отходящие ( мощность нагрузки ) будут соответственно: Q1=- [Uк2/X1- Е эUк /X1* cos δ1] Q2=- [Uк2/X2- U*Uк /X2* cos δ2] Возьмем производную по Uк : dQ1/dUк =-1/X1 [2 Uк - Е э/ cos δ1] dQ2/dUк =1/X2 [2 Uк - U/ cos δ2] Полученные производные позволяют определить производную d(Q1-Q2)/d Uк = d∆Q г/ dUк =0 Т.о. условия подхода с-мы при изменении напряжения к критической по условию устойчивости режима дает ур-ие: d∆Q г/ dU=0
|
13. Прямой критерий статической устойчивости.
Выделим в
рассматриваемой системе одну
генераторную ветвь.
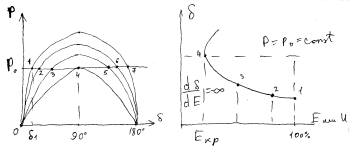
14. Косвенные (вторичные) критерии статической устойчивости. Пусть изменение режима вызывает изменение ЭДС или напряжения. Мощность генератора РГ = const равный мощности турбины РТ = Р0 = const.
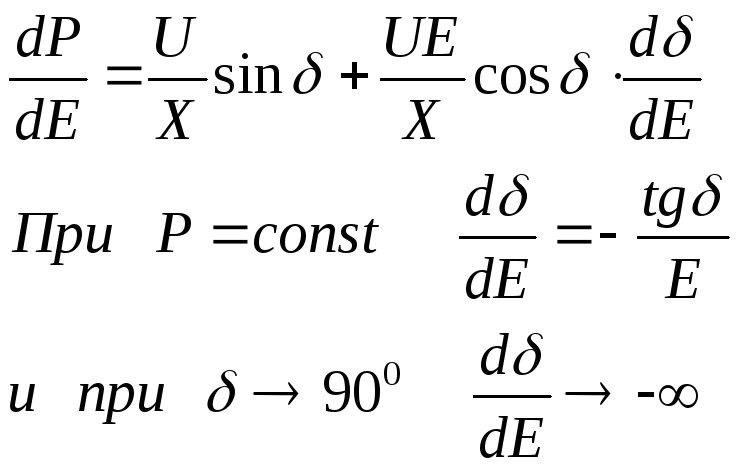
На основе характеристик мощности можно получит зависимость δ = f (E или U). Из зависимости δ = f (E) следует, что если к критической точке подходит, сохраняя неизменную мощность генератор и изменяя ЭДС или напряжение, то появлении неустойчивости в виде текучести режима или сползания наступит при (dδ/dE) = ∞. Поскольку любая точка на нижней части кривой δ = f (E) соответствует устойчивому режиму, т.к. такая точка отвечает точке при С > 0 на кривой Р=f (δ). Таким образом условие устойчивости системы может быть записана как (dE/dδ) < 0, а её критическое состояние (dE/dδ) = 0. Получим, рассмотренный графически критерии, аналитическим путем. Для этого возьмем производную dP/dE.
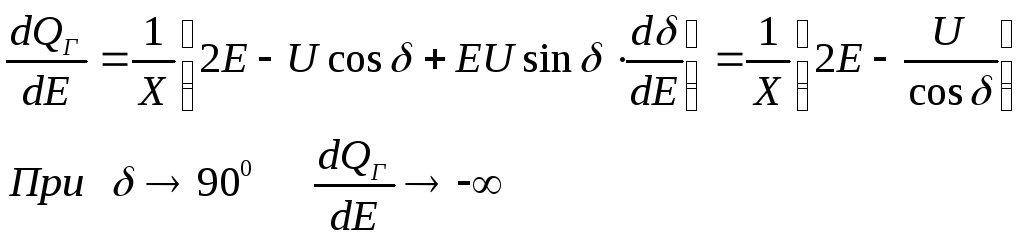
Возьмём производную реактивной мощности по dE.
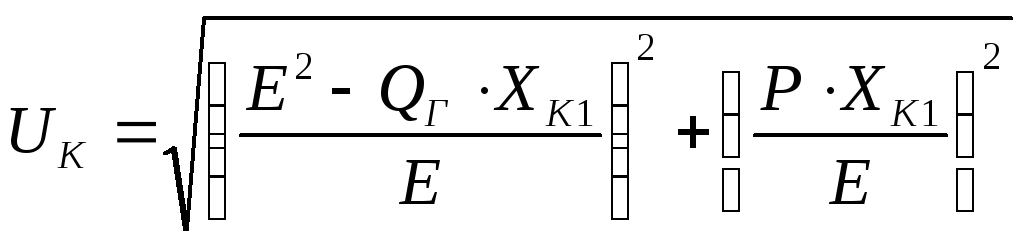
Рассмотрим систему
Напряжение UK в любой точке системы можно выразить через Е в начале (точка 1).
Из этого уравнения мы можем получить dUK/dE = φ (dQГ/dE). Т.е. по величине этой производной или dE/dUK можно также судить об устойчивости системы и при Р = const предельный по устойчивости режим наступает при (dE/dUK) = 0.
(dE/dUK) > 0 - условие по устойчивости.
|
15. Исследование статической устойчивости методом малых отклонений ( малых колебаний ) Применим метод малых колебаний для исследования статической устойчивости простейшей задачи сх.генератора ШБМ При небольших возмущениях движения ротора генератора описывается выражением: Tj *(d2 δ/dt 2)= P0 – Pmax sinδ (1) Правая часть ур-ия (1) не линейна, поэтому не имеет аналитич. решения при малых отклонениях от положительного равновесия ∆δ мало оказывается возможно линеоризовать это ур-ие: Разложим функцию в ряд Тейлора в области ∆Р0: ∆P=P0 – Pmax*sinδ =P0 – Pmax*sinδ0 – (dP/dδ) δ =δ0 * ∆δ-1/2!( d2 P/dδ 2 ) δ =δ0* ∆δ2 - …… Где ∆δ=δ- δ0 – малое отклонение угла от его исходного значения При малых значениях ∆δ его степенями выше 1-ой можно пренебречь и с учетом, что: P0 = Pmax*sinδ0 ∆P = -(dP/dδ) δ =δ0 * ∆δ Т.к. δ= δ0+∆δ ;δ0 – пост. величина, то запишем: d2 δ/dt 2= d2 (δ0 + ∆δ)/ dt 2= d2 ∆δ/ dt 2 Подставим полученное ур-ие в ур-ие ускорения ротора: α= d2 δ/dt 2=∆P/ Tj d2 ∆δ/ dt 2 +1/Tj *dP/d δ *∆ δ =0 Решением этого ур-ия явл-ся изменение ∆δ во времени по выражению: ∆δ = f(t) ∆δ = к1еp1t + к2еp2t Где p1 и p2- корни характеристического ур-ия. p2 +1/Tj *dP/dδ =0 Эти корни имеют вид: P1=p2=+-(-1/ Tj *dP/dδ)под корнем))=+-j (1/ Tj *dP/dδ)под корнем)) Если при анализе учесть демпферный момент, то ур-ие ускорения запишем в виде: Tj *d2 ∆δ/ dt 2 +( Pd *d ∆δ/ dt)+ dP/dδ*∆δ=0 Если предположить, что ЭДС и напряжение изменяются Еq =var то: ∆P= ∂P/dδ*∆δ+∂P/∂ Еq * ∆Еq +∂P/∂U*∆U=c1∆δ+в1∆Еq+d1*∆U (2) C1=∂P/dδ; d1=∂P/∂U; в1=∂P/∂ Еq Тогда осн. ур-ие малых колебаний: Tj *d2 ∆δ/ dt 2 +( Pd *d ∆δ/ dt)+ c1∆δ+в1∆Еq +d1∆U=0 (3) Корни характеристического ур-ия P1 и P2 получаются чисто мнимыми при dP/dδ>0 , либо чисто вещественными при dP/dδ<0 При чисто мнимых корнях P1,2=+jw или -jw w=+-((1/ Tj *dP/dδ)под корнем)) Решение характеристического ур-ия имеет вид: ∆δ=К1е-jwt + К2е-jwt И изменение угла происходит по закону незатухающих колебаний в окрестности δ. Если учесть потери характеристик колебаний становится затухающим. Если корни вещественны, то изменение угла имеет апериодический характер. Т.о. необходимым и достаточным условием устойчивости яв-ся: dP/dδ>0 , что было восстановлено ранее. Метод малых колебаний предполагает линеоризующее ур-ие движения ротора – генератора получение характеристического ур-ия и анализ корней этого ур-ия. Ур-ие движения ротора в опереат.виде: T jp2 ∆δ + Pd p ∆δ + c1 ∆δ=0 (4) Характеристич. ур-ие для ур-ия (4) имеет вид: T jp2 + Pd p + c1 =0 p1,2=-Pd +(-) (( Pd2-4 T j C1)/2 T j под корнем))=+(-) (-[С1/ T j – (Pd2/2 T j2)]под корнем)) +( – (Pd/2 T j)=+(-)jγD+α α=– (Pd/2 T j); γD=(С1/ T j)-α2 ( под корнем всё ур-ие ) Решение ур-ия (4) имеет вид: ∆δ = с1еp1t + с2еp2t (5) Определив С1 и С2 получим зависимость угла ∆δ от времени ∆δ=f(t). При изучении малых колебаний эту зависимость редко строят. В инженерных задачах достаточно выяснить её характер, установить, будут ли изменения угла апериодическими или колебательно затухающими или нарастающими ( самораскачивание). Исследовать процесс можно при помощи: Найти знач. характеристического ур-ия Пользуясь математическими критериями устойчивости определить знаки вещественных корней ( частей корней )без нахождения их численного значения. Сделать выводы об устойчивости с-мы. Выражение (5) позволяет выявить зависимость между характером процесса и виды корней ур-ия, расположение их на комплексной плоскости. Появление в числе корней хотя бы 1го « + » корня или хотя бы 1го комплексного корня с « + » вещественной частью, будет указывать на непрерывное увеличение угла. ∆δ=f(t).т.е. неустойчивость характера процесса. При « - » вещественных корнях комплексный характер ПП будет затухающим. При обращении корня в 0 т.е при α=γ=0 полученная с-ма нач. отклонения должна сохранятся неизменной. Обращение в 0 действительных частей корней показывает на появление не затухающих и вариант 2х кратных частей.
24.Физическая интепритация уравнений для генератора с регулированием возбуждения. Всякое изменение U на ΔU0 на шинах генератора ведёт к изменению Еq при росте нагрузки Р и ↑δ сопровождается ↓U; Еq↑(действие АРВ) и восстанавливает U → рабочая точка характеризующая режим будет перемещаться в плоскости Р - δ переходит с характеристики имеющую меньшую Еq на характеристики с большим значением Еq.
В зависимости от коэффициента усиления изменяется Еq и вместе с этим поддерживается U будут различны; различными будут и степень изменения Е`q обычно по условию устойчивости системы у регуляторов пропорционального действия выбирают такой КOU при котором Е`q=const. Поскольку Е`q при резких изменениях режима в начальный момент времени не меняется а далее меняется медленно можно считать что регулятор возбуждения способствует постоянству Е`q и у генераторов имеющих пропорциональный регулирования возбуждения электромеханические пп определяются согласно характеристике Р=f(δ) при Е`q= Е`= const. соответственно замещать генераторы ЭДС Е`q или Е` необходимо вводить в схему замещения Х`d
|

 Ii=(Iqi-jIdi)ejδi+∑
Ekejδkjyikejαik.
Ii=(Iqi-jIdi)ejδi+∑
Ekejδkjyikejαik.