

Шпоры_2011
.doc
|
49. Неустойчивость частоты (лавина частоты). Явление неустойчивости (лавины) частоты может возникать при неблагоприятном сочетании характеристик агрегатов и вспомогательных устройств (собственных нужд), определяющих выработку генераторами мощности, с одной стороны, и потребление мощности нагрузкой — с другой. В этих случаях небольшое начальное снижение частоты может далее как бы усиливаться и приобретать лавинообразный характер. Причина этого явления заключается в снижении мощности, выдаваемой генераторами при снижении частоты. Это происходит при отсутствии резерва генерирующей мощности в системе в связи с тем, что механизмы собственных нужд тепловых станций снижают производительность со снижением частоты. Таким образом неблагоприятное сочетание характеристик агрегатов и вспомогательных устройств собственных нужд, определяющих выработку генераторами мощности с одной стороны и потребление мощности нагрузкой с другой. Нарушение устойчивости может быть связано также с неправильным действием регуляторов частоты, характеристики и параметры которых могут быть неблагоприятно выбраны в отношении устойчивости их параллельной работы. Меры предотвращения неустойчивости частоты. Автоматическая разгрузка по частоте. Приведенное выше исследование позволяет сделать выводы, что снижение частоты в электрической системе в некоторых случаях приводит к уменьшению активной мощности, выдаваемой генераторами, что может привести к неустойчивости их режима (лавине частоты). Понижение частоты вызывает уменьшение выдачи реактивной мощности и в то же время увеличение потребления реактивной мощности нагрузкой, что приводит к понижению напряжения в узлах нагрузки системы. При снижении частоты до 43—45 Гц напряжение может снизиться до критического значения, при котором возникает лавина напряжения. Лавины частоты и напряжения вызывают массовое отключение потребителей от действия их защит и стимулируют нарушение параллельной работы электрических станций. Ликвидация аварий и восстановление нормального режима системы могут длиться несколько часов. Явление лавины частоты и, возможно, одновременной лавины напряжения протекает в течение нескольких десятков секунд или секунд. В такое короткое время дежурному персоналу трудно правильно оценить создавшееся положение и провести необходимые мероприятия в системе. Понижение частоты до опасных пределов практически может быть предотвращено в двух случаях: 1) если в системе имеется достаточно большой вращающийся резерв; 2) если с понижением частоты автоматически отключается некоторая часть нагрузки, т. е. производится так называемая автоматическая частотная разгрузка (АЧР). Наиболее быстро дополнительную мощность можно получить в том случае, если вращающийся резерв составляют гидрогенераторы, однако, их большая инерционность позволяет выдать агрегатам резерва всю мощность только через 15—20 с. Это не всегда может предотвратить аварию. Эффективность гидрогенераторного резерва значительно повышается за счет использования динамического метода регулирования подачи энергоносителя на турбины. Резерв на ТЭС может быть эффективен только при достаточной мощности котлов и оборудования агрегатов совершенными автоматическими устройствами. Запуск резервных агрегатов при понижении частоты во многих случаях не может предотвратить развития аварии, т.к. даже гидрогенераторам требуется не менее 1—2 мин для набора мощности. В этом плане эффективным могут оказаться современные ГТУ на базе авиационных двигателей, которые позволяют уменьшить влияние больших возмущений по частоте. Суммарная мощность обычного вращающегося резерва, выбранного по условиям экономичности, должна составлять 10—20%, но часто оказывается меньше. В часы максимума нагрузки системы вращающийся резерв может полностью отсутствовать. При аварии, связанных с отключением генераторов и станций или с разделением системы на отдельные части, может появляться дефицит мощности, достигающий 30% и более. Поэтому наиболее надежным решением является автоматическое отключение соответствующей части нагрузки. Эту задачу и выполняют устройства АЧР. Роль АЧР особенно велика в энергетических системах небольшой и средней мощности с малым числом электрических станций и слабо развитыми электрическими сетями. По мере укрупнения энергетических систем относительное (а не абсолютное) значение возможного аварийного небаланса мощности снижается. Однако даже в мощных объединенных энергосистемах отказываться от АЧР было бы нецелесообразно. Т. о. в объединенных системах большое значение имеет разгрузка по частоте.
|
50. Неустойчивость напряжения (лавина напряжения). В нормальном режиме системы при малых его возмущениях возникает необходимость проверки статической устойчивости синхронных двигателей, синхронных компенсаторов и больших групп асинхронных двигателей, которые, имея мощность, соизмеримую с мощностью питающих их генераторов, могут оказаться неустойчивыми, причем эта неустойчивость проявляется в виде специфического явления, называемого лавиной напряжения. Пуски двигателей, резкие колебания момента на их валу и т. д. приводят к изменениям значения и фазы напряжения в узлах нагрузки. В дисциплинах электрических машин и электропривода обычно отмечают, что асинхронные двигатели имеют большие запасы устойчивости и поэтому обеспечение статической устойчивости отдельных двигателей, входящих в нагрузку, не вызывает затруднений. Если запас устойчивости характеризовать отношением максимального вращающего момента к рабочему, то коэффициент запаса составит 1,5—1,7. Следовательно, даже значительные снижения напряжения на шинах двигателей не могут привести к нарушению их устойчивости. Однако это относится к единичному двигателю или группе двигателей, питаемых от шин напряжения, значение которого не зависит от режима двигателя. Если двигатель или группа двигателей питается от генератора или группы генераторов, замененных эквивалентным генератором соизмеримой мощности, то напряжение на шинах двигателя зависит от режима двигателя (от его скольжения). Условия нарушения устойчивости (опрокидывания) двигателя получаются при этом существенно иными. В этом случае качественные изменения условий устойчивости обусловлены изменением количества двигателей, подключенных к узлу нагрузки. В принятой постановке задачи должна рассматриваться как единое целое вся масса двигателей (эквивалентный двигатель), входящих в нагрузку, причем и параметры этих двигателей, и их рабочие режимы известны очень приближенно. В комплексную нагрузку могут также входить и синхронные двигатели, и различного рода статические устройства (печи, установки электролиза и т. д.), что еще более осложняет задачу в отношении точности. Пытаться оперировать с параметрами отдельных двигателей и по ним отыскивать «эквивалентный», в таких условиях, очевидно, безнадежно, и решение поставленной задачи будет проводиться в два этапа. 1. Получение качественных характеристик и основных математических соотношений в предположении, что для эквивалентного (всей нагрузке) асинхронного двигателя известны параметры схемы замещения. При этом, так как речь идет о качественных — физических — характеристиках, необходимых для обоснования рабочей методики, грубость схемы замещения не может быть существенна. 2. Получение на основе характеристик нагрузки расчетной практической методики для выявления возможности появления лавины напряжения и оценки имеющегося запаса
|
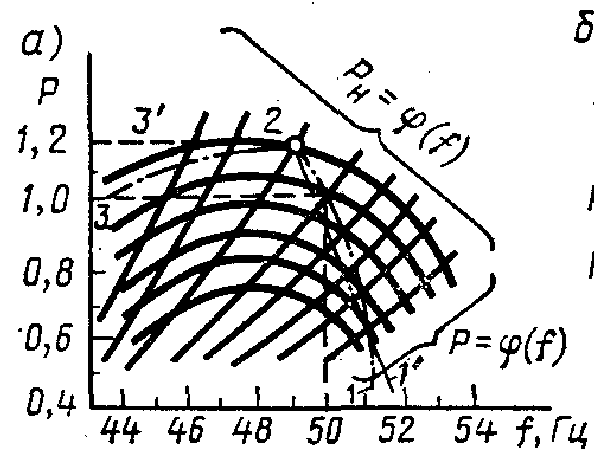
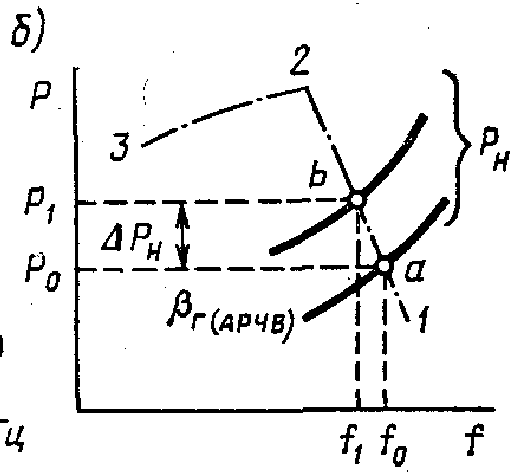
47. Статические характеристики системы (медленные измен.част. в уст.режиме) Установившееся значение частоты при изменении нагрузки турбины, не имеющей регулирования скорости, может быть найдено с помощью способа пересечения характеристик P = φ(f) и Pн' = φ(f) (Pн' – частотная характеристика нагрузки при Uн = const, P – характеристика нерегулируемой турбины). При регулировании скорости агрегата регуляторами скорости характеристика активной мощности, отдаваемой генератором, будет получена в результате плавного перехода с одной характеристики P = φ(f), построенной при постоянном впуске энергоносителя (постоянном открытии), на другую (рис. 15.4,а). На участке 1 2 этой характеристики по мере уменьшения частоты мощность растет. Начиная с точки 2, после полного открытия направляющего аппарата (в случае турбогенератора — после полного открытия клапана), регулирование уже не может влиять на изменение мощности турбины, и в соответствии с ее естественной характеристикой происходит уменьшение мощности со снижением частоты. При аварийных режимах, когда частота в системе снижается настолько, что регуляторы полностью открывают устройства впуска энергоносителя, процессы считаются протекающими согласно характеристике 2 3 или 2 3'. На участке 2 I характеристику P= φ(f) можно заменить прямой 2 1', считая, что P = Pн+ΔP. Построенные характеристики относятся к одиночному агрегату, имеющему регулятор скорости, действие которого отражено в данном анализе переходом рабочей точки с одной характеристики на другую. В результате получилась характеристика регулируемой турбины (/ 2 на рис. 15.4,а). Если происходит изменение мощности нагрузки на ΔPн, то, как это показано на рис. 15.4,6, в системе «генератор — нагрузка» установится новая частота f1, которая соответствует пересечению новой характеристики нагрузки и характеристики генерации (точка Ь). Процесс перехода от a к b и соответственно от f0 к f1 начинается после того, как отклонение частоты превысит зону нечувствительности регулятора скорости, и происходит в течение 5—20 с. Регулирование при обычных механических регуляторах скорости начинается с запаздыванием порядка 0,2-0,5 с. После окончания действия регуляторов скорости или еще в процессе их работы в действие вступают регуляторы частоты. Зона нечувствительности автоматического регулятора частоты (АРЧ) значительно меньше, чем у регулятора скорости (АРС), но действует он значительно медленнее. Действие его отражается в смещении характеристик P = φ(f) из положения 1
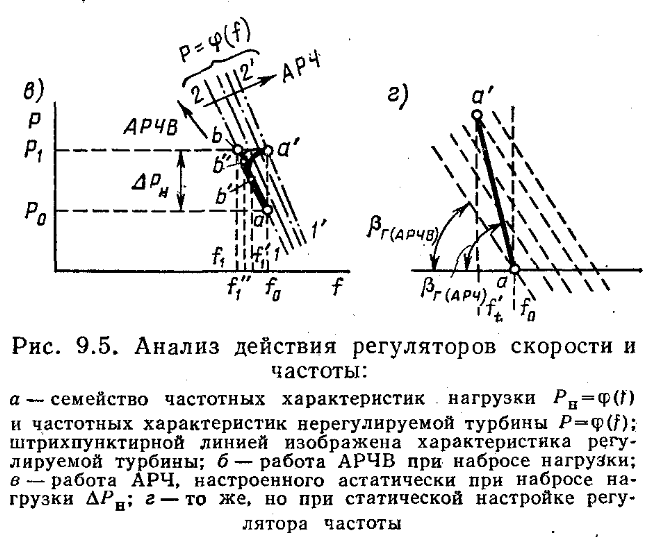
2 к положению 1' 2'. Это смещение занимает 10—40 с. Показанная на рис. 15.4,в настройка АРЧ, когда он восстанавливает частоту до начального значения f0, является астатической. При параллельной работе нескольких энергосистем, снабженных АРЧ, астатическая настройка невозможна (она привела бы к неопределенности в перераспределении мощностей по линиям связи). При статической настройке (обычно астатическую настройку частоты в системах не применяют) характеристики принимают вид, показанный на рис. 15.4,в. Действие АРЧ в этом случае не изменяет вида зависимости P= φ(f),меняя только наклон ее. Таким образом, все рассуждения и математические соотношения, полученные для системы с АРС. будут справедливы для системы с АРЧ, но при учете того, что углы наклона βГ(АРЧ) (рис. 15.4,г) будут разными. Построенные характеристики относятся к единичной турбине и единичной нагрузке. Однако они могут быть распространены на всю систему в целом. Для этого под характеристикой Pн = φ(f) надо понимать суммарную нагрузку всей системы PнΣ , а под характеристикой PГ = φ(f) — суммарную генерирующую мощность всех агрегатов PГΣ. При изменениях частоты около номинального значения характеристика нагрузки PнΣ= φ(f) имеет наклон касательной tg βН = bf = (ΔPНΣ / Δf)(f0 / PH0Σ), а характеристика генерации — tg βГ = 1/σГ = (ΔPГΣ / Δf)(f0 / PГΣ), где bf — регулирующий эффект нагрузки по частоте, причем величину 1/bf = σH иногда называют статизмом нагрузки; PH0Σ — суммарная нагрузка системы при номинальной частоте; σГ — статизм агрегатов системы. Суммарные характеристики нагрузок и генераторов системы, полученные при медленных изменениях частоты (статические характеристики), могут существенно отличаться от динамических характеристик системы, получаемых в условиях быстрого изменения частоты, хотя общий характер зависимости обычно не изменяется. Легко видеть, что для системы в целом ΔPΣ = ΔPГΣ – ΔPНΣ, где ΔPГΣ = – (PГΣ/ σГ)( Δf /f0); ΔPHΣ = – (PHΣ/ σH)( Δf /f0).
|
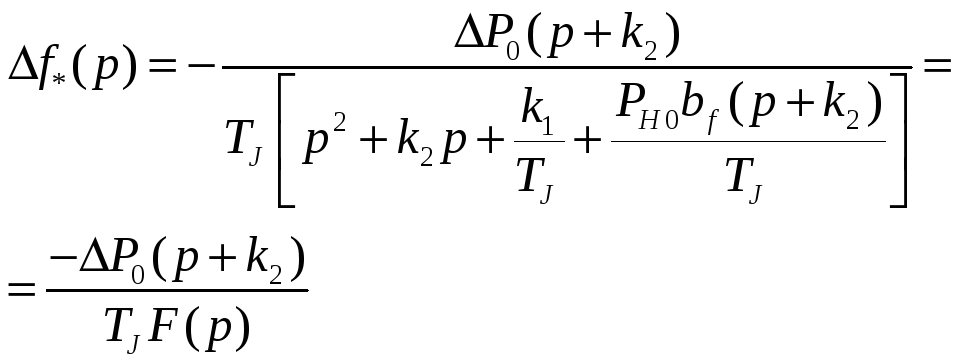
48. Динамические характеристики системы при изменении частоты Изменение частоты (скорости) в переходном процессе можно определить аналитически. Предположим, что мощность, потребляемая нагрузкой, будет пропорциональна частоте: PH = PH0(1+bf Δf*), (15.2) где PH0 — мощность нагрузки в первый момент после возмущения; bf — регулирующий эффект нагрузки по частоте; Δf*= Δf /f0=Δω*— относительное изменение частоты. В переходном режиме мощность турбины под действием регулятора турбины изменяется на величину Pрег, которая определяется как pPрег = – Δf*PT.ном/(σTs) – Pрег/Ts (15.3) где Ts — постоянная времени двигателя исполнительного механизма (серводвигателя). Дифференциальное уравнение, характеризующее изменение частоты в системе, имеет вид TJpΔf*+PH–PT=0, (15.3а), где PT = PT0+ Pрег. Введем обозначения: k1= PT.ном/(σTs); k2= 1/Ts. Здесь σ— коэффициент неравномерности (статизм) регулятора скорости. Тогда вместо (15.3) запишем pPрег+k2Pрег+ k1Δf*=0. (15.4а). Предположим, что в момент времени t=0 изменяются мощности нагрузки, тогда ΔP0=PH0 – PT0. При этом уравнение движения запишется в виде TJpΔf*+ PH0(1+ bf Δf*)– PT0– Pрег=0 (15.46) или TJpΔf*+ PH0 bf Δf*–– Pрег+ ΔP0=0, где из (15.4а) Pрег= –– k1 Δf* /(p+k2), откуда
TJpΔf*(p+k2)+PH0bfΔf*(p+k2)+k1Δf*+ΔP0(p+k2)=0;
Корни F
(р) имеют
значения –α±jΩсоб,
где
Переходя к временной зависимости, получим
, φ=arctg(B/A)
Значение Δf
выше фигурировало в относительных
единицах, окончательное выражение
может быть
записано в виде
В установившемся режиме значение частоты f∞=f0[1-ΔP0σ/(PT,НОМ+PH0bf σ)], при bf=0 отклонение частоты Δf=ΔP0σ f0/PT,НОМ. Эквивалентная механическая постоянная времени также зависит от режима системы или объединения. Так, в одной системе эта постоянная изменялась в течение суток от 15 до 18 с зимой и от 13 до 15 с летом. Выше предполагалось, что при набросе нагрузки (изменении на ΔP0) турбина под действием регулятора изменяет свою мощность на Pрег. Однако это изменение невозможно, если вся мощность турбины уже использована, т. е. полностью открыт направляющий аппарат (полный впуск пара). В этом случае Pрег=0 и протекание переходного процесса характеризуется уравнением TJpΔf*+ PH0 bf Δf*+ ΔP0=0, (15.9) откуда Δf* = [–ΔP0/( PH0 bf)](1–e—t/TJэ) (15.10), где TJэ=TJ/( PH0 bf). Изменение частоты Δf* имеет, согласно (15.10), экспоненциальный характер, причем если нагрузка системы не будет зависеть от частоты(bf=0), то режим установиться не сможет(Δf*→∞). Физически это означает, что при отсутствии регулирования (или саморегулирования) система не могла бы работать, так как появление малейшего небаланса ΔP приводило бы к полному нарушению режима системы (рис. 15.6). 1 Уравнения (15.4а) и (15.46) относились как к агрегату, так и ко всей системе в целом. В зависимости от того, что понималось под Ts и σ, эти уравнения могли характеризовать изменения частоты под действием только АРС (первичный регулятор) или АРЧ (вторичный регулятор). Рассмотрим совместное действие первичного и вторичного регуляторов. Пусть в системе действует АРЧ астатического типа, который при появлении отклонения Δf изменяет установки регулятора скорости, стремясь свести Δf к нулю. При этом уравнение АРС запишется в виде TSpPрег = (−Δf*/σ)PT,НОМ−Pрег+PАРЧ (15.11) где PАРЧ—изменение мощности за счет действия АРЧ, которое можно определить из уравнения, отражающего переходный процесс в АРЧ: T2pPАРЧ=−(Δf*/σ) PT,НОМ (15.12) Определив из (15.12) величину PАРЧ и подставив в (15.11), получим pPрег+k2Pрег+ Δf*(k1+k3/p)=0, (15.13) Где k1и k2 имеют прежние значения, а k3= PT,НОМ/(σ2T2TS) Далее, из (15.13) и (15.46) получим TJpΔf*+PH0(1+bfΔf*) – PT0+[ Δf*/(k2+p)](k1+k3/p) =0; После преобразования [p3+p2(k2+k'TJ)+p(k'k2+k1)/TJ+k3/TJ] Δf*= – (p2+pk2)ΔP0/TJ (15.14) или A(p) Δf*= – B(p) ΔP0/TJ, тогда Δf*= – [B(p)/A(p)] (ΔP0/TJ). От полученного в операторной форме решения можно перейти к временной зависимости:
где pk— корни уравнения A(p)=0.
|


 (15.15)
(15.15)
|
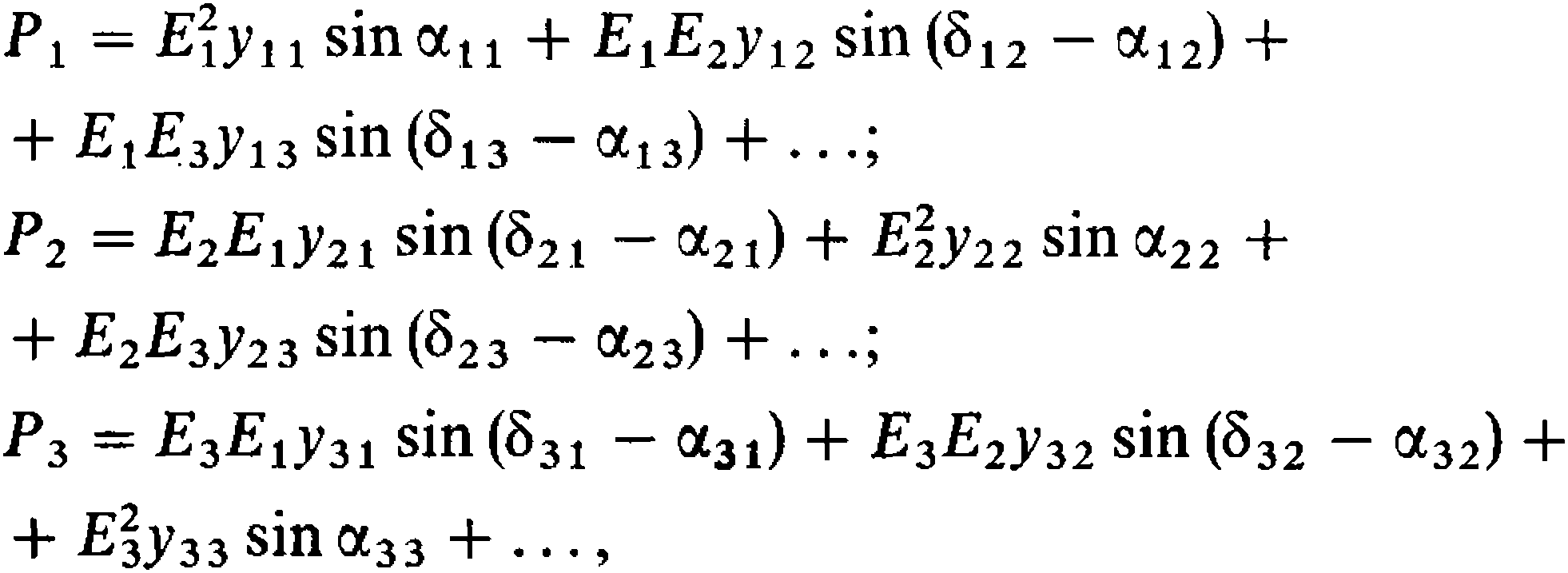
16.Применение метода малых колебаний для анализа статической устойчивости сложных систем. Предпосылка постоянства мощности промежуточных станций в расчетах статической устойчивости сложных систем оставляет некоторую неудовлетворенность и может рассматриваться в лучшем случае как практический расчетный прием. Для выяснения истинных критериев статической устойчивости сложных электрических систем с несколькими электростанциями и нагрузками мы снова обратимся к методу малых колебаний, причем так же, как и раньше, для упрощения выкладок, но без ущерба для общности результатов, предположим сначала, что все нагрузки системы представлены постоянными сопротивлениями. Тогда мощности генераторов легко могут быть выражены через собственные и взаимные проводимости ветвей электростанций в расчетной схеме системы:
Относительные углы представляют собой разность абсолютных углов, отсчитываемых от произвольно выбранной синхронно вращающейся оси. Если число генераторов в системе равно М, то только М — 1 относительных углов в уравнениях являются независимыми переменными, через которые могут быть выражены все остальные относительные углы. Таким образом, мощности машин являются функциями М – 1 независимых переменных и их можно записать следующим образом:
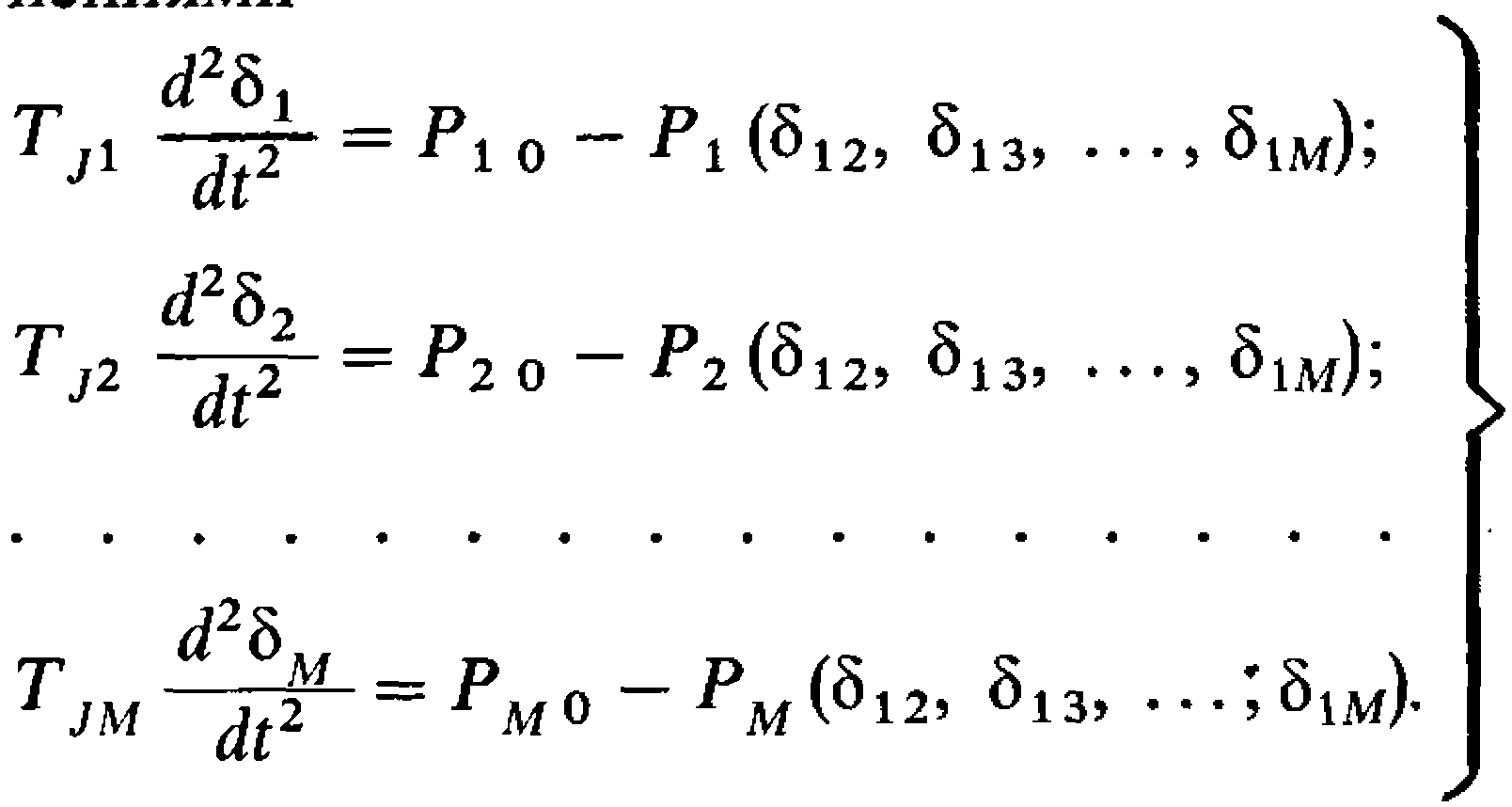
При нарушении установившегося режима работы системы возникают качания машин, характер которых определяется дифференциальными уравнениями
Отбрасывая члены разложения высших порядков и преобразуя левые части уравнений к виду
получаем уравнения малых колебаний системы:
Разделив затем уравнения на соответствующие значения постоянных инерции Тj1 Tj2, .Tj и вычтя из первого из них все остальные поочередно, мы переходим к окончательному виду уравнений малых колебаний, связывающих относительные углы:
- относительные ускорения станций, взятых попарно. Полученная система уравнений позволяет судить о характере колебаний всех относительных углов при малых возмущениях.
При х, вещественных
и отрицательных угловые частоты coz-
вещественны1
и колебания
вида
имеют незатухающий синусоидальный характер. В действительности при учете потерь в этих условиях колебания затухают и система может быть признана устойчивой. Если же xf не удовлетворяет указанным выше условиям, то система неустойчива.
|
|
|
|

|
16. Применение метода малых колебаний для анализа статической устойчивости сложных систем.(Продолжение) Так, например, при х вещественных и положительных частоты получаются
мнимыми:
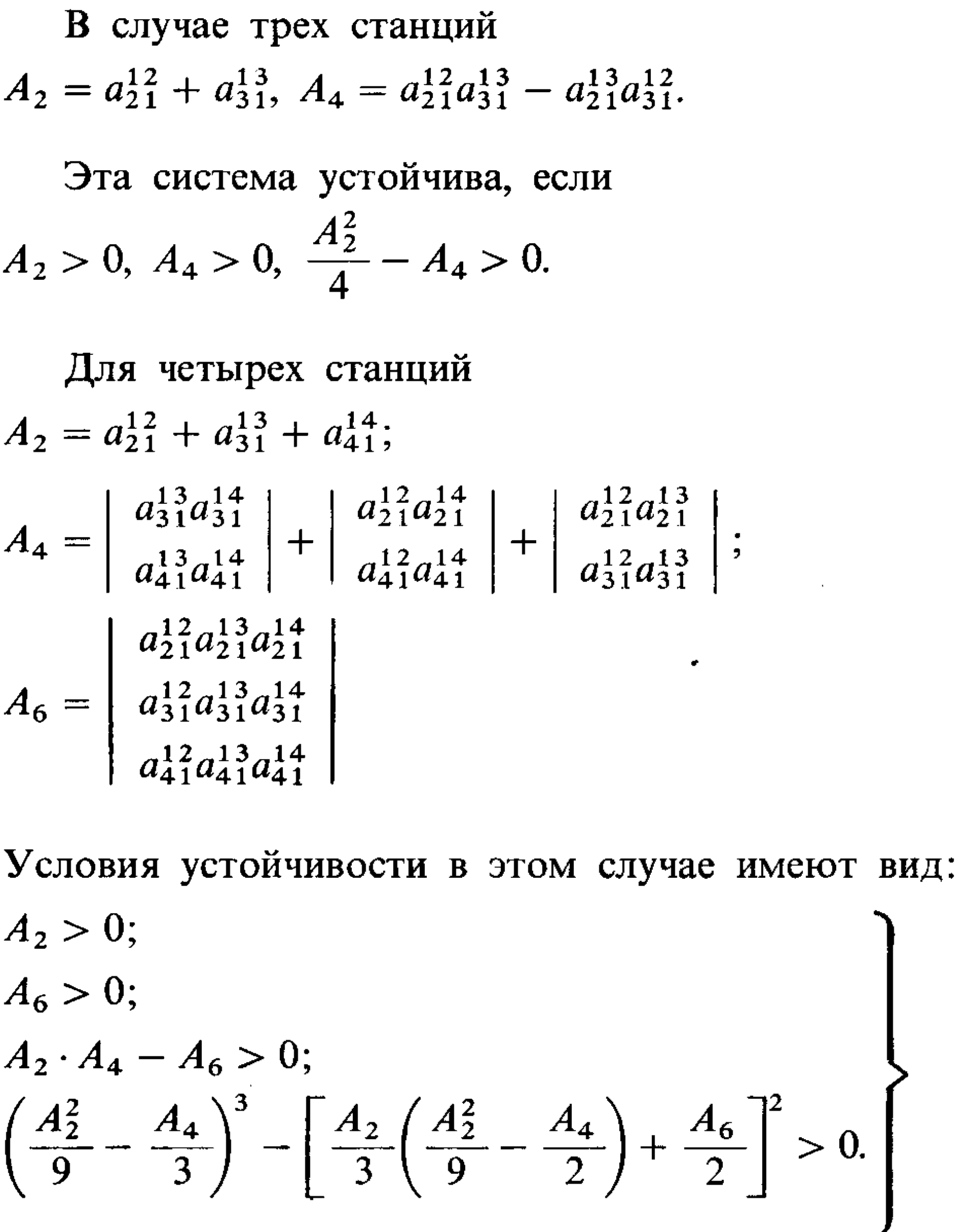
Для устойчивости системы необходимо и достаточно, чтобы корни х были вещественны и отрицательны. Это требование выполняется при определенных соотношениях между коэффициентами Ai для случаев двух, трех и четырех станций Для двух станций условие устойчивости системы имеет вид:
Коэффициенты А содержат относительные ускорения а, в которые входят частные производные мощностей по относительным углам дРг/дδ12, дРг/дδ13, ..., дР2/дδ12, дР2/дδ1Ъ и т.д. Эти производные при любых характеристиках нагрузок системы могут быть найдены с помощью (16-5), (16-6), но при иных дополнительных условиях, уравнивающих число уравнений и неизвестных. Вместо допущения постоянства мощностей промежуточных станций в настоящем случае при вычислении производных по какому-либо относительному углу, например по углу б12, следует полагать приращение всех других относительных углов равными нулю: Δδ13 = = Δδ14 = ... =0, поскольку определяемые производные являются частными производными2 по относительным углам.
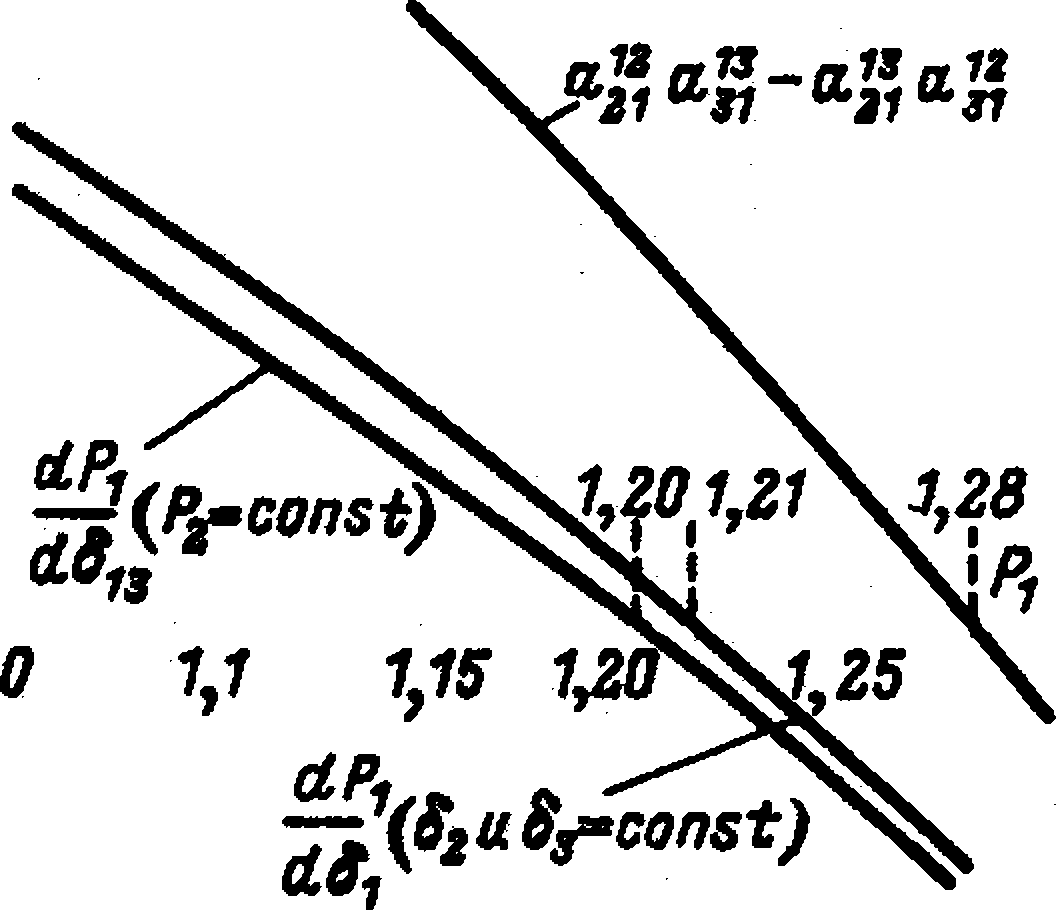
Рис. 17-1. Сопоставление пределов мощности, получаемых по различным условиям устойчивости. Помимо производных мощностей генераторов ускорения а содержат также и постоянные инерции Тл, TJ2 и т. д., которые отсутствуют в выражении синхронизирующей мощности, используемом в гл. 16 в качестве приближенного критерия устойчивости. На это обстоятельство мы уже обращали внимание в случае двух электростанций. Можно думать, что и для сложных систем истинная область устойчивости несколько шире определяемой знаком синхронизирующей мощности, подобно тому, как это имело место для двух электростанций. На рис. 17-1 иллюстрируется это положение для схемы с тремя станциями. Из условий устойчивости (17-13) раньше других нарушается
Однако вытекающий отсюда предел передаваемой мощности все же выше, чем определяемый знаком синхронизирующей мощности. Последняя вычислялась при условии постоянства мощности промежуточной станции (Р2 = const), а также и при постоянстве углов всех станций, кроме данной (δ2 и δ3 = const).
|
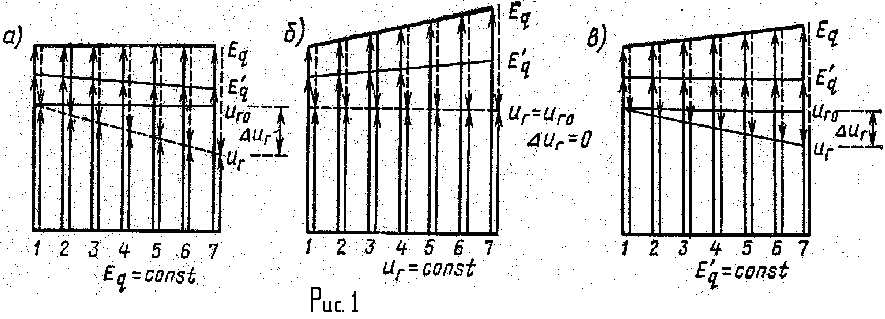
21.АРВ пропорционального действия: Эффективность АРВ п.д. с точки зрения увеличения предельно передаваемой мощности зависит от правильного выбора величины коэффициента регулирования по отклонению напряжения и параметров стабилизации. При больших K0U=50÷100 напряжение на выводах генератора поддерживается практически постоянным (ΔUГ≈0) и работа отражается угловой характеристикой 1234567 (рис.1, б). Однако в этих случаях АРВ п.д. обеспечивает предельную мощность, лишь немного большую, чем нерегулируемый генератор (Eq=const). Мощность ограничена, т.к. при UГ=const в системе и некотором значении P=P3 (точка 3 рис.1, б) начинается самораскачивание и ее синхронная работа нарушается. Поэтому АРВ п.д. в системах, содержащих дальние передачи, не стремятся поддерживать UГ=const, допуская некоторое его снижение ΔUГ с ростом нагрузки (рис.1, в), т.е. работая со статизмом KСТ=(ΔUГ/UГ0)100. Передаточные функции: Передаточная функция, записанная в операторной форме:
Те, Тр – соответственно постоянные времени возбудителя и регулятора; Передаточная функция регулятора зависит от закона регулирования и от типа АРВ. В некоторой идеализации можно записать для АРВ п.д.:
Общий вывод: АРВ проводит своего рода исправление характеристик генераторов. Так, генератор, имеющий идеальное – безынерционное, без зоны нечувствительности – регулирование, может приближенно замещаться не сопротивлением Xd и приложенной за ним ЭДС Eq, как у нерегулируемого генератора, а некоторой ЭДС EX, приложенной за сопротивлением ΔX. Величина сопротивления ΔX будет тем меньше, чем сильнее регулирование, т.е. больше способность регулирующих устройств поддерживать напряжение при изменении нагрузки.
22.АРВ сильного действия: АРВ с.д. позволяет поддержать постоянство напряжения во всем рабочем диапазоне изменения мощности вплоть до PMAX UГ=CONST (рис.1, б, точка 7). В этом случае установка больших коэффициентов по напряжению (K0U≈100 и более) не влечет за собой самораскачивание, т.к. в регуляторе приняты специальные меры стабилизации (регулирование по ряду дополнительных параметров, включающих первую и вторую производные от регулируемой величины). Следовательно, в схеме замещения системы генератор с АРВ с.д. должен быть замешен параметрами XГ=0, UГ=const. АРВ с.д. по сравнению с АРВ п.д. увеличивает предельно передаваемую мощность тем больше, чем больше X1d и меньше XC. Передаточные функция: Для АРВ с.д. (при пренебрежении постоянными времени дифференцирующих звеньев):
K0П j, K1П j, K2П j – коэффициенты усиления АРВ по отклонению, первой и второй производным режимного параметра. Общий вывод: АРВ проводит своего рода исправление характеристик генераторов. Так, генератор, имеющий идеальное – безынерционное, без зоны нечувствительности – регулирование, может приближенно замещаться не сопротивлением Xd и приложенной за ним ЭДС Eq, как у нерегулируемого генератора, а некоторой ЭДС EX, приложенной за сопротивлением ΔX. Величина сопротивления ΔX будет тем меньше, чем сильнее регулирование, т.е. больше способность регулирующих устройств поддерживать напряжение при изменении нагрузки.
|
Система регулирования с зоной нечувствительности: В действительности наличие той или иной зоны нечувствительности или инерционности в АРВ любого типа неизбежно. При достаточно интенсивном действии регулятора возбуждения генератор может не выпасть из синхронизма. За углом, превышающим предельный угол, может наступить квазиустановившийся режим, проявляющийся в больших установившихся колебаниях. Эти автоколебания могут быть устойчивыми (с постоянной амплитудой) или неустойчивыми, с нарастающей амплитудой, т.е. давать самораскачивание. Режим больших качаний, имеющий место при сохранении устойчивости и приводящий к изменениям напряжения и тока, в эксплуатации неприемлем, и, следовательно, в любом случае регулятор с зоной нечувствительности практически не может обеспечить работу генератора при c1=dPEq/dδ<0 хотя некоторое время может держать генератор в таком режиме (искусственная устойчивость). Чем меньше зона нечувствительности, тем меньше размах колебаний при dPEq/dδ<0. Регулятор без зоны нечувствительности: Этот регулятор дает возможность работать без качаний при повышенной мощности, когда естественная характеристика указывает на неустойчивость. Однако для реализации этой возможности нужно выбирать закон регулирования, параметры и настройку АРВ так, чтобы исключить возможность самораскачивания. Это физически соответствует введению в электрическую систему демпфирующего эффекта.
26.Регулятор частоты. Установившееся значение частоты при изменении нагрузки турбины, не имеющей регулирования скорости, может быть найдено с помощью способа пересечения характеристик P = φ(f) и Pн' = φ(f) (Pн' – частотная характеристика нагрузки при Uн = const, P – характеристика нерегулируемой турбины).
П При аварийных режимах, когда частота в системе снижается настолько, что регуляторы полностью открывают устройства впуска энергоносителя, процессы считаются протекающими согласно характеристике 2 3 или 2 3'. На участке 2 I характеристику P= φ(f) можно заменить прямой 2 1', считая, что P = Pн+ΔP. Построенные характеристики относятся к одиночному агрегату, имеющему регулятор скорости, действие которого отражено в данном анализе переходом рабочей точки с одной характеристики на другую. В результате получилась характеристика регулируемой турбины (/ 2 на рис. 15.4,а). Если происходит изменение мощности нагрузки на ΔPн, то, как это показано на рис. 15.4,6, в системе «генератор — нагрузка» установится новая частота f1, которая соответствует пересечению новой характеристики нагрузки и характеристики генерации (точка Ь). Процесс перехода от a к b и соответственно от f0 к f1 начинается после того, как отклонение частоты превысит зону нечувствительности регулятора скорости, и происходит в течение 5—20 с.
|
|
 ри
регулировании скорости агрегата
регуляторами скорости характеристика
активной мощности, отдаваемой
генератором, будет получена в результате
плавного перехода с одной характеристики
P
= φ(f),
построенной при постоянном впуске
энергоносителя (постоянном открытии),
на другую (рис. 15.4,а). На участке 1
2 этой
характеристики по мере уменьшения
частоты мощность растет. Начиная с
точки 2,
после
полного открытия направляющего
аппарата (в случае турбогенератора —
после полного открытия клапана),
регулирование уже не может влиять на
изменение мощности турбины, и в
соответствии с ее естественной
характеристикой происходит уменьшение
мощности со снижением частоты.
ри
регулировании скорости агрегата
регуляторами скорости характеристика
активной мощности, отдаваемой
генератором, будет получена в результате
плавного перехода с одной характеристики
P
= φ(f),
построенной при постоянном впуске
энергоносителя (постоянном открытии),
на другую (рис. 15.4,а). На участке 1
2 этой
характеристики по мере уменьшения
частоты мощность растет. Начиная с
точки 2,
после
полного открытия направляющего
аппарата (в случае турбогенератора —
после полного открытия клапана),
регулирование уже не может влиять на
изменение мощности турбины, и в
соответствии с ее естественной
характеристикой происходит уменьшение
мощности со снижением частоты.