

6. Принципиальные схемы узлов сэп.
В представленном проекте решаются две задачи. Во – первых, разработать алгоритмы управления двухкоординатным формообразованием и разработать схему сопряжения микроЭВМ с автономным электроприводом. Во – вторых, разработать принципиальные схемы узлов автономного следящего электропривода. При реализации второй поставленной задачи было решено оставить схемотехнические решения, применённые в системе числового программного управления Н33-2М воспользовавшись современной элементной базой.
На рис. 6.1 показан генератор тактовых импульсов вырабатывающий две последовательности импульсов сдвинутых по фазе на 180 эл. градусов частотой 100 кГц.
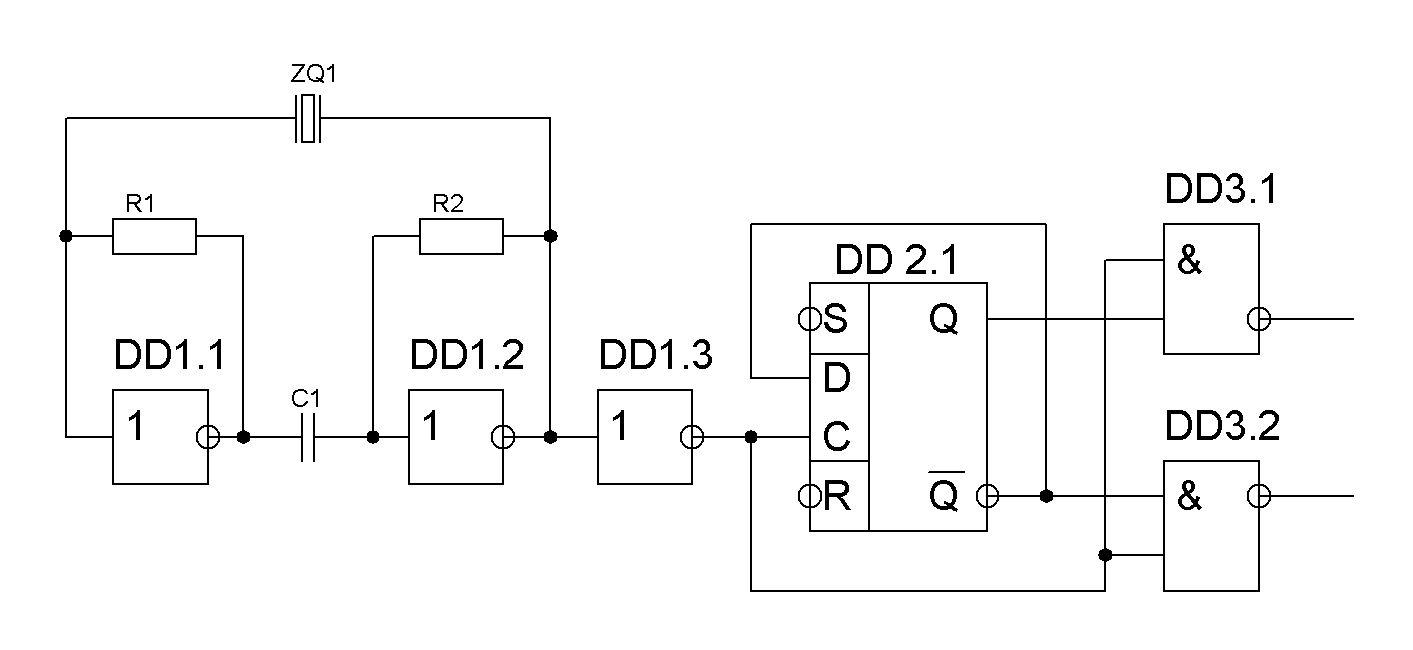
рис. 6.1. Принципиальная схема генератора тактовых импульсов.
С генератора тактовых импульсов последовательность ТИ 2 поступает на счётчик – делитель Д 2 изображённый на рис. 6.2, выделяющий каждый 5-й, 50-й, 100-й, 150-й, 195-й и 200-й импульсы. 50-й, 100-й, 150-й и 200-й импульсы используются для формирования питающих напряжений синусно – косинусного вращающегося трансформатора, использованного в качестве датчика положения. 5-й, 195-й и 200-й импульсы используются в схеме ограничения рассогласования.
На рис. 6.3 показана схема Блока синхронизации сложения (вычитания). В данном блоке производится синхронизация импульсов управляющей программы с последовательностями импульсов ТИ 1 и ТИ 2.

рис. 6.2. Принципиальная схема делителя Д 1.
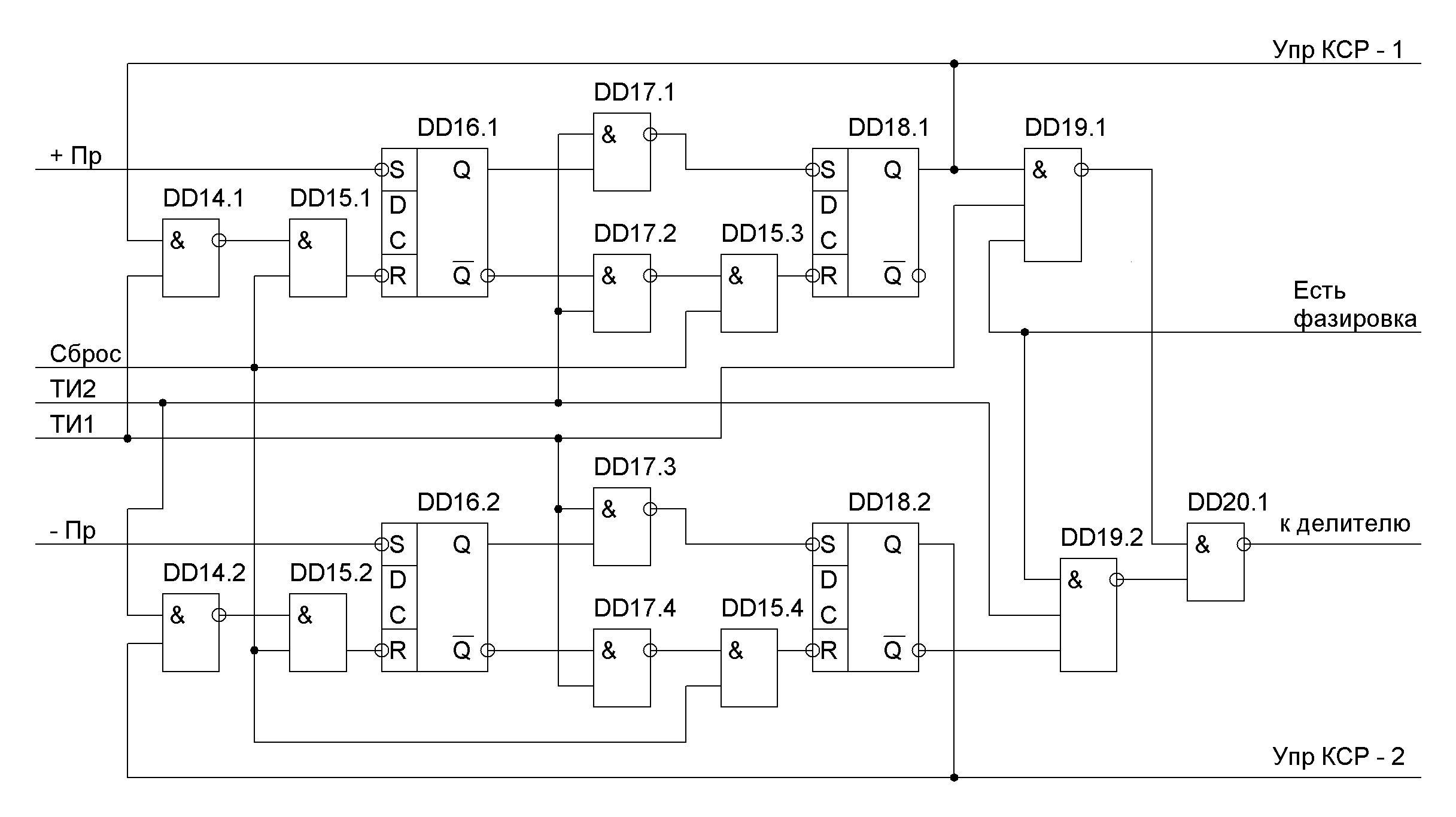
рис. 6.3. Принципиальная схема блока синхронизации и сложения (вычитания).
На рис. 6.4 изображена принципиальная схема канала компенсации скоростной ошибки, управляющие импульсы с которого подаются на блок согласования с электроприводами.

рис. 6.4. Принципиальная схема канала компенсации скоростной ошибки.
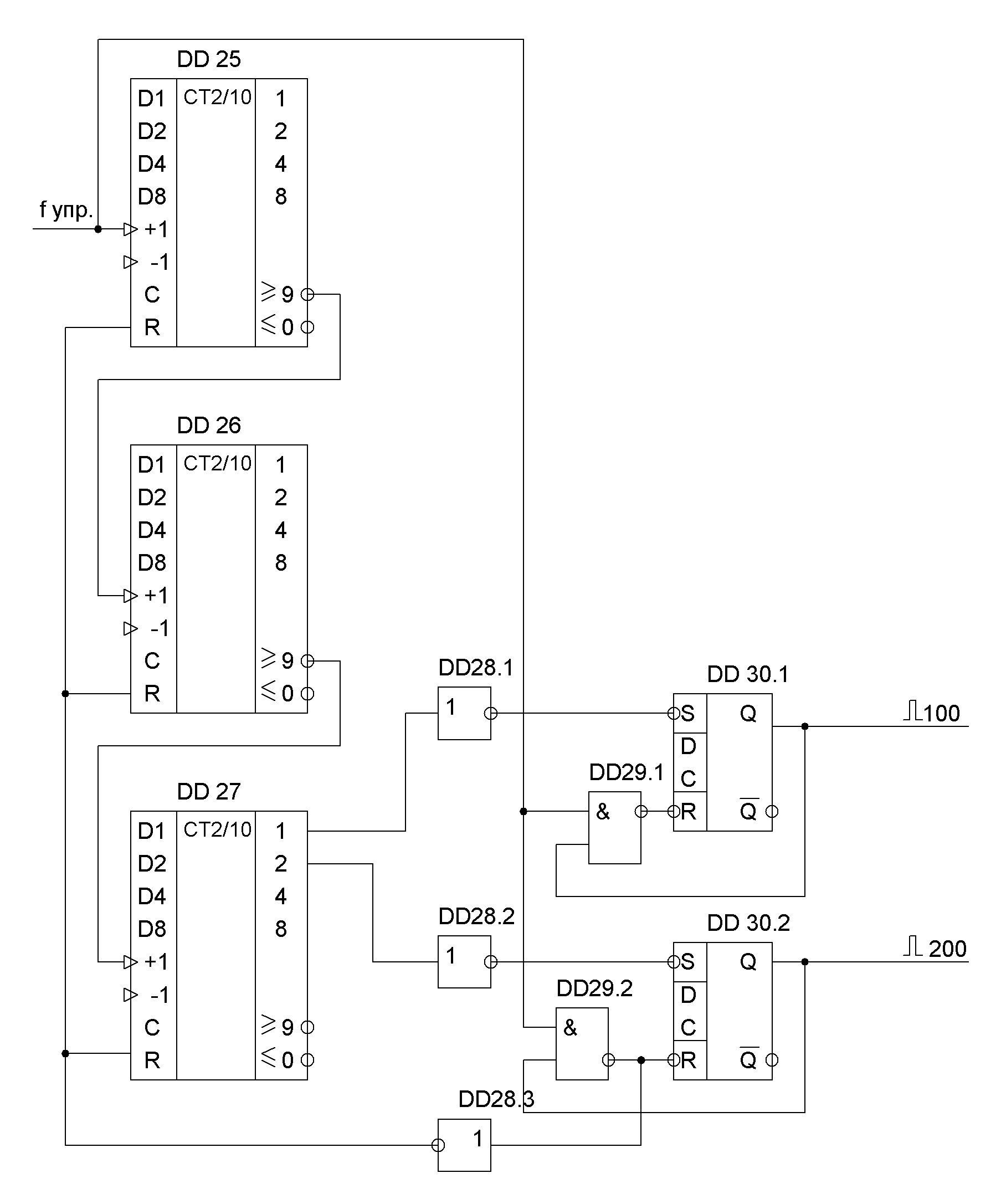
рис. 6.5 Принципиальная схема делителя Д 2.
На рис. 6.5 показана схема счётчика – делителя на 200. Последовательность импульсов, сформированная данным узлом сравнивается в фазовом дискриминаторе с последовательностью импульсов, сформированной формирователем импульсов обратной связи. Схема фазового дискриминатора представлена на рис. 6.6.
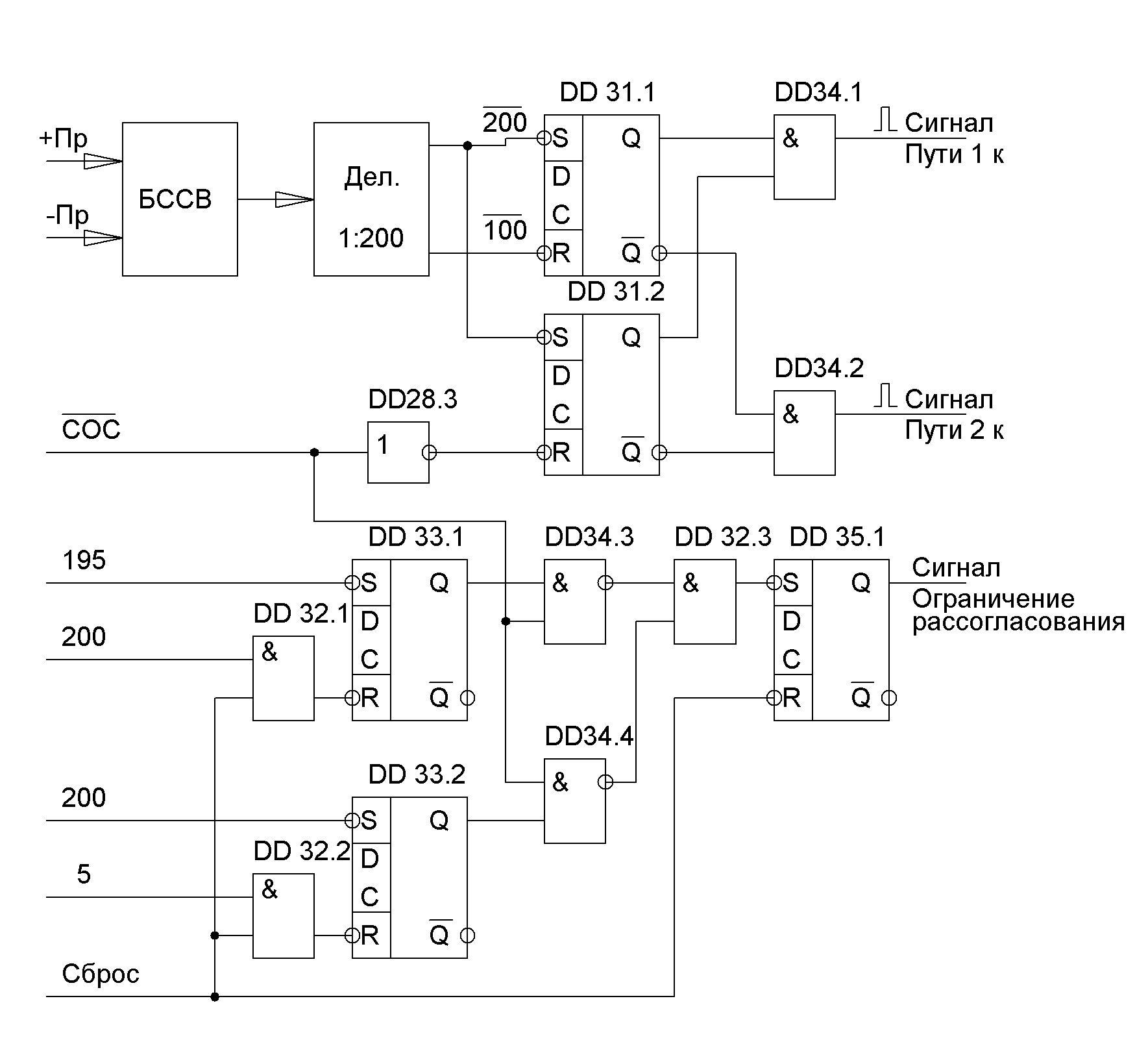
рис. 6.6. Принципиальная схема фазового дискриминатора и узла ограничения рассогласования.
На рис. 6.7 представлена схема источника питания. Напряжения – 15В и + 15 В используются для питания оптронных пар и для питания датчика положения. Напряжение + 5 В подаётся на все остальные блоки где необходимо питание цифровых микросхем.
Спецификации на используемые в системе управления элементы представлены в приложении 2.
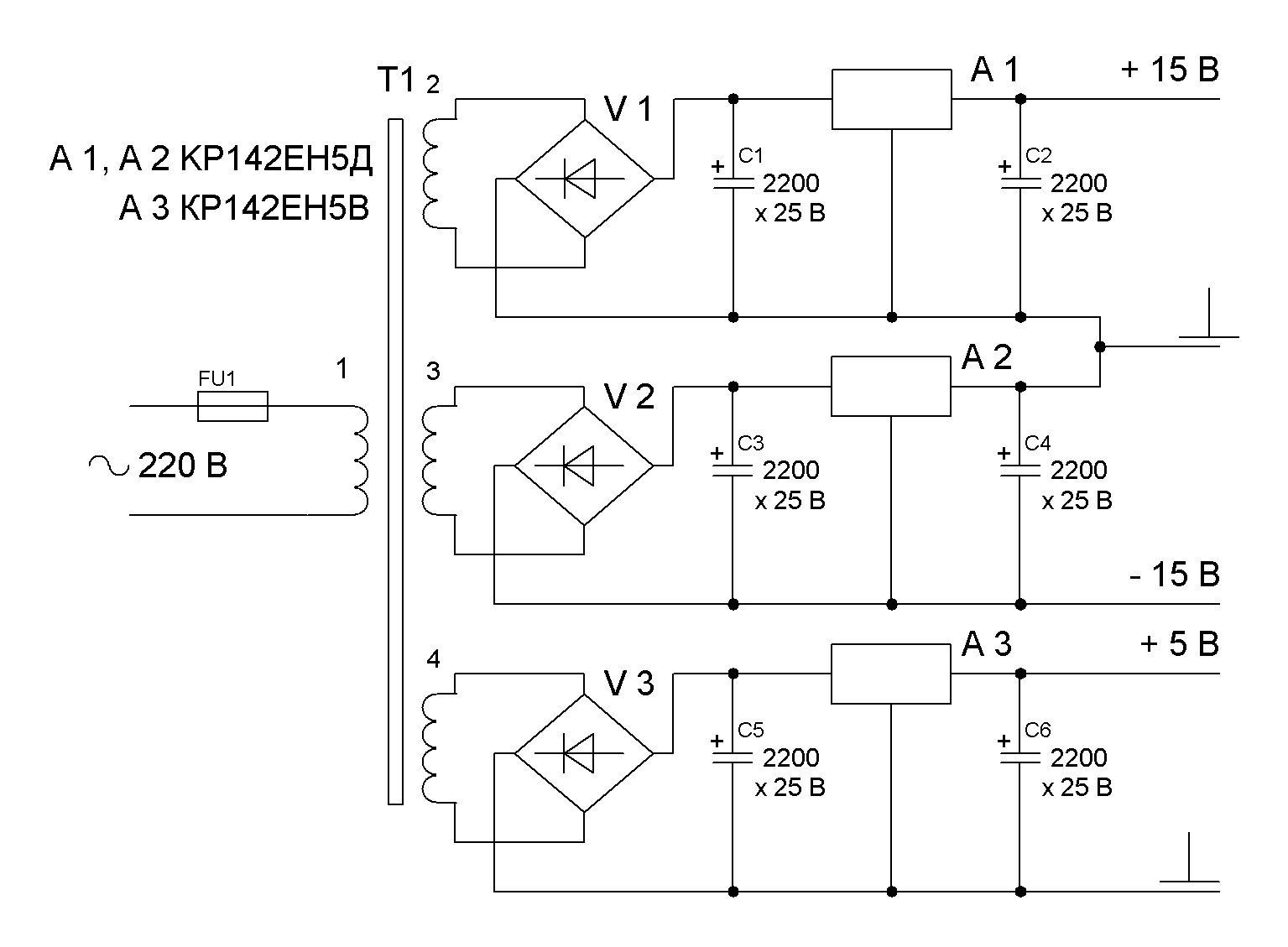
рис. 6.7 Принципиальная схема источника питания.
7. Расчёт параметров сэп.
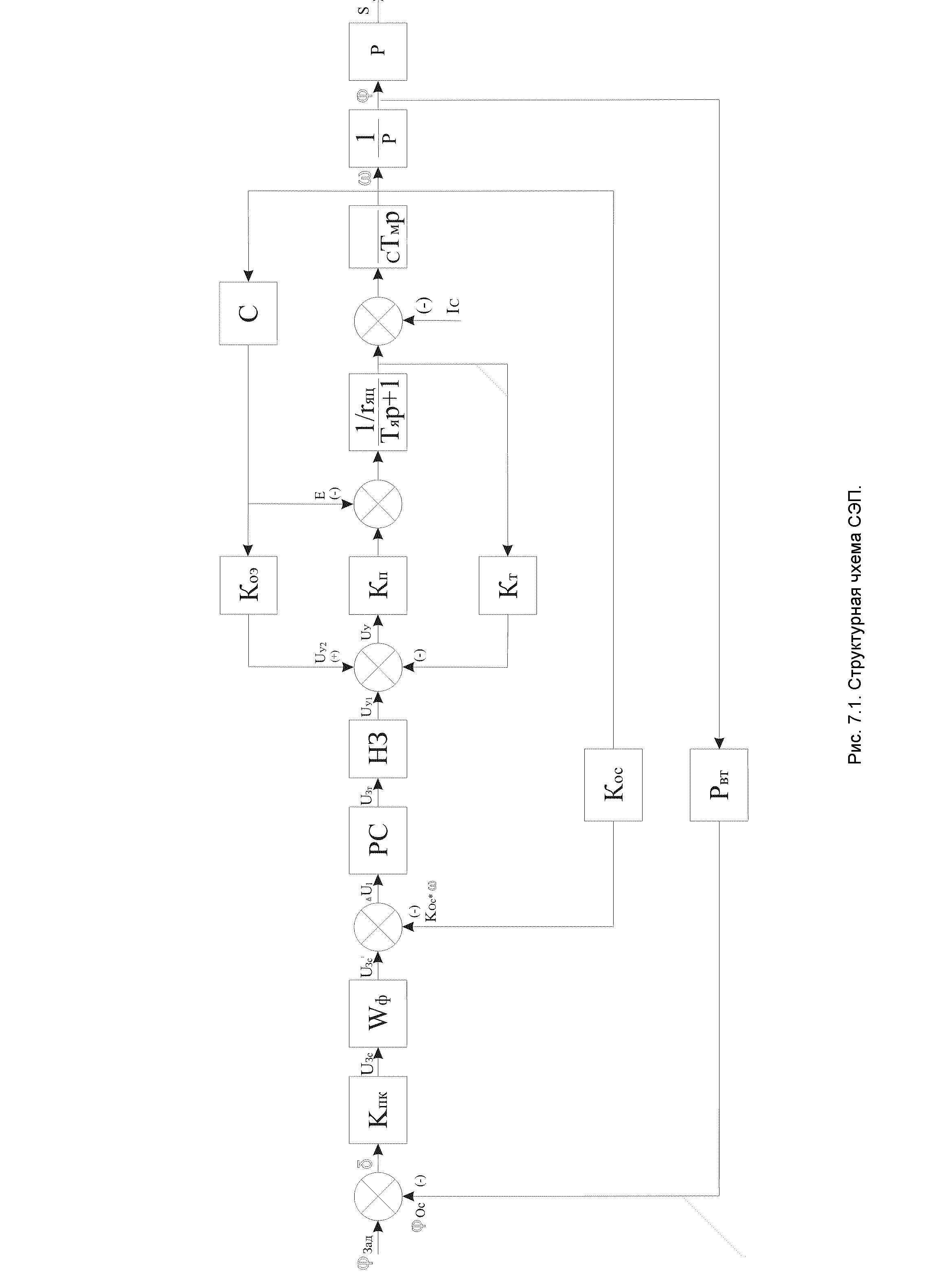
Структурная схема следящего электропривода представлена на рисунке 7.1. Определим основные передаточные функции.
Передаточная функция замкнутого контура тока
![]() , (7.1)
, (7.1)
где
![]() , (7.2)
, (7.2)
![]() . (7.3)
. (7.3)
Передаточная функция объекта регулирования
![]() , (7.4)
, (7.4)
где
![]() .
.
Зададимся желаемой ЛАЧХ разомкнутого контура скорости «2-1-2»
![]() , (7.5)
, (7.5)
![]() , (7.6)
, (7.6)
где
![]() , (7.7)
, (7.7)
![]() . (7.8)
. (7.8)
Из структурной схемы видно, что
передаточный коэффициент преобразователя
![]() равен
равен
![]() , (7.9)
, (7.9)
где
![]() - коэффициент усиления управляемого
выпрямителя
- коэффициент усиления управляемого
выпрямителя
![]() ; (7.10)
; (7.10)
![]() - коэффициент усиления управляющего
органа (
- коэффициент усиления управляющего
органа (![]() )
;
)
;
![]() - коэффициент усиления переключателя
характеристик (
- коэффициент усиления переключателя
характеристик (![]() )
.
)
.
Задавшись
![]() с, найдём
с, найдём![]() из (7.3) и
из (7.3) и![]() из (7.2)
из (7.2)
![]() В/А ,
В/А ,
![]() В/А .
В/А .
Следовательно, передаточная функция замкнутого контура тока по () примет вид
![]() .
.
Коэффициент нелинейного звена определим по формуле
![]() ,
,
где
![]() - перегрузочная способность двигателя
по току (
- перегрузочная способность двигателя
по току (![]() ),
),
![]() - максимальное значение задания тока,
принимаем 10 В.
- максимальное значение задания тока,
принимаем 10 В.
Зная номинальную скорость двигателя и
задавшись максимальным напряжением
задания скорости
![]() =
10 В, можем определить коэффициент
обратной связи по скорости
=
10 В, можем определить коэффициент
обратной связи по скорости![]()
![]() В с .
В с .
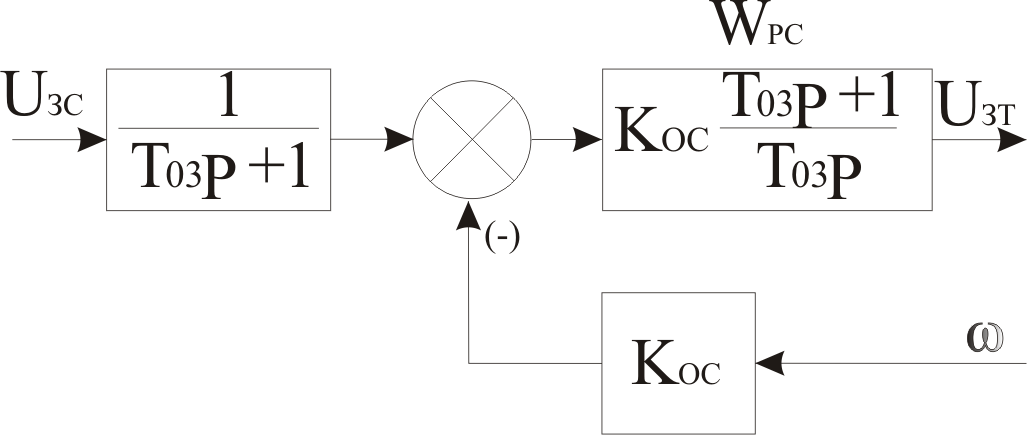
Запишем передаточную функцию замкнутого контура скорости
 ,
,
тогда с учётом фильтра на входе с передаточной функцией
![]() ,
,
передаточная функция замкнутого контура скорости примет вид
![]()
.
С учётом вышеизложенного, структурную схему СЭП можно представить в упрощённом виде, представленном на рис. 7.2
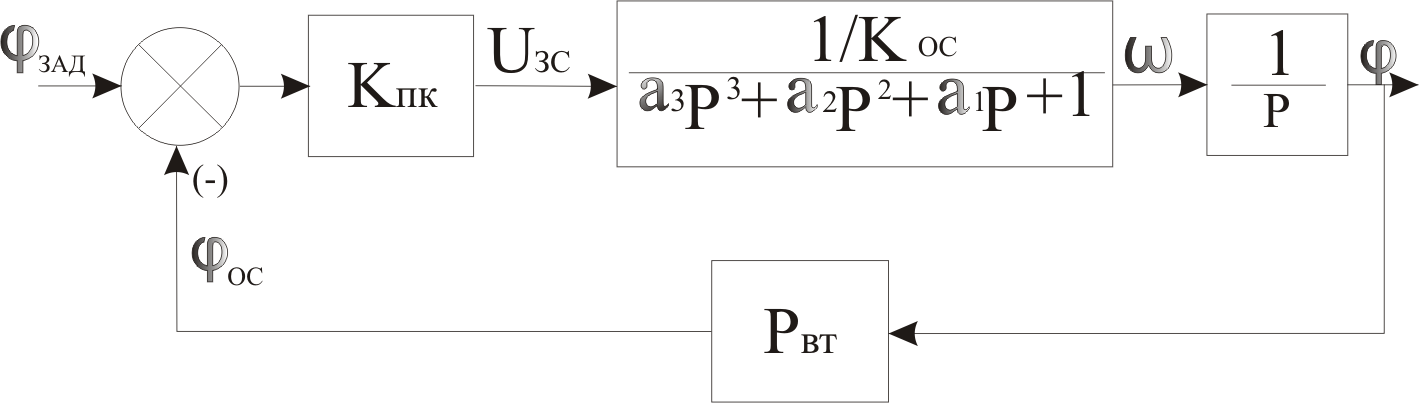
рис. 7.2. Упрощённая структурная схема СЭП.
Передаточная функция разомкнутого контура положения
![]() ,
,
тогда при
![]() ,
,
передаточная функция замкнутой системы примет вид
![]() ,
,
Зададимся биноминальной настройкой которая характеризуется переходным процессом без перерегулирования, со следующими характеристиками:
a=2.66;b=2.25;
с=2.66;![]() ;
;![]() .
.
Зная
![]() с,
находим остальные постоянные времени
с,
находим остальные постоянные времени
![]() с,
с,
![]() с,
с,
![]() с.
с.
Добротность СЭП по скорости
![]()
![]() .
.
Коэффициенты регулятора скорости и путевого канала находятся по формулам
![]()
![]()
![]() ,
,
![]()
![]() .
.
Расчётное время переходного процесса
![]() с.
с.
7.1 Настройка контура ток.а
Электропривода серии ЭПУ характеризуются
отсутствием «ПИ»-регулятора тока.
Следовательно, настройка токового
контура сводится к установке токоограничения
![]() ,
при котором обеспечивается максимальное
быстродействие.
,
при котором обеспечивается максимальное
быстродействие.
7.2 Настройка контура скорости.
Настройка контура скорости заключается в настройке параметров регулятора скорости.
Передаточная функция регулятора скорости имеет вид
![]() ,
,
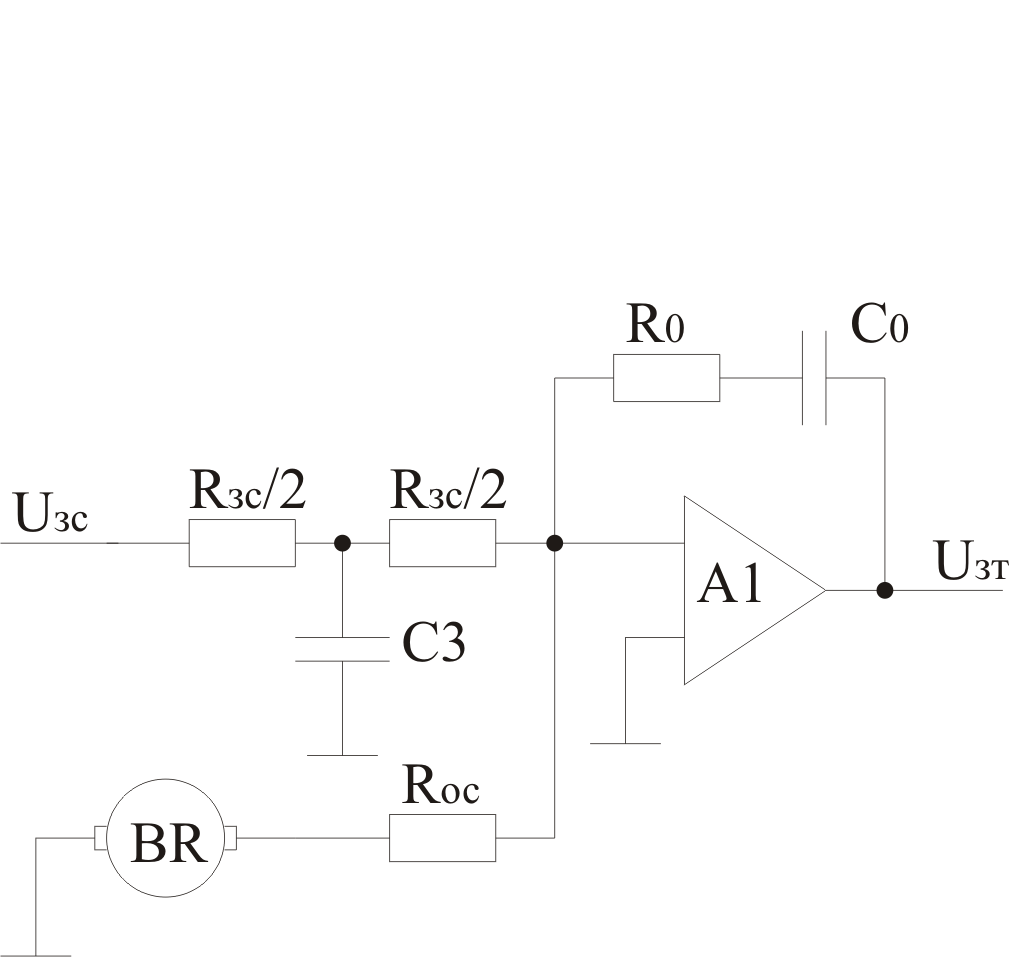
Принципиальная и структурная схемы регулятора скорости и фильтра на его входе приведены на рисунке 7.3.
|
|
|
б)
рис. 7.3. Принципиальная (а) и структурная (б) схемы регулятора скорости
Для принципиальной схемы
 .
(7.2.1)
.
(7.2.1)
Используя свойство операционного
усилителя (![]() ),
определим
),
определим![]() ,
,
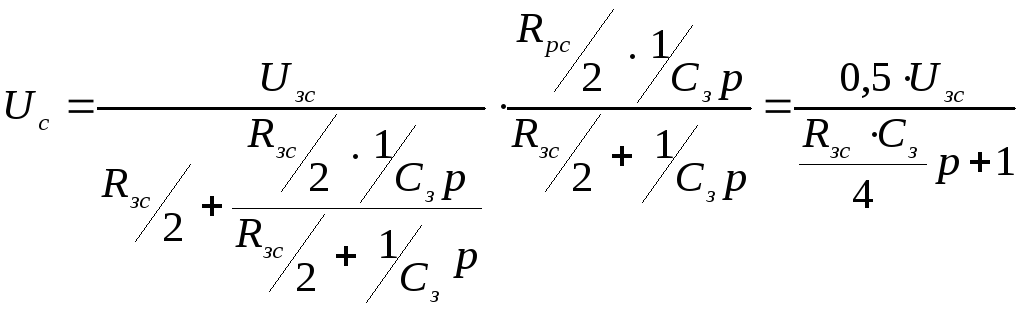 .
(7.2.2)
.
(7.2.2)
С учётом (7.2.2) выражение (7.2.1) принимает вид
 ,
(7.2.3)
,
(7.2.3)
Для структурной схемы имеем
![]() ,
(7.2.4)
,
(7.2.4)
Анализируя равенства (7.2.3) и (7.2.4) имеем
![]() ,
(7.2.5)
,
(7.2.5)
![]() ,
(7.2.6)
,
(7.2.6)
![]() ,
(7.2.7)
,
(7.2.7)
![]() .
(7.2.8)
.
(7.2.8)
Зададимся ёмкостью
![]() кОм,
тогда из (7.2.5) – (7.2.8) найдём недостающие
параметры принципиальной схемы:
кОм,
тогда из (7.2.5) – (7.2.8) найдём недостающие
параметры принципиальной схемы:
![]() ,
,
![]() кОм,
кОм,
![]() ,
,
![]() кОм,
кОм,
где
![]() -
коэффициент тахогенератора,
-
коэффициент тахогенератора,
![]() .
.
7.3 Настройка контура положения и канала компенсации скоростной ошибки.
Структурная схема для расчётов параметров СЭП импульсно-фазового типа представлена на рисунке 7.4.
На рисунке обозначено:
ИФП – импульсно-фазовый преобразователь,
![]() ;
;
ФД – фазовый дискриминатор,
![]() ;
;
ПЧН – преобразователь «частота-напряжение»,
![]() ;
;
У – подстроечные усилители, для канала скоростной компенсации и контура положения.
Определим коэффициенты усилителей
![]() и
и![]() .
Зная добротность СЭП по скорости, как
коэффициент усиления разомкнутой
системы, по структурной схеме определим
её
.
Зная добротность СЭП по скорости, как
коэффициент усиления разомкнутой
системы, по структурной схеме определим
её
![]() ,
(7.3.1)
,
(7.3.1)
откуда получаем
![]() .
.
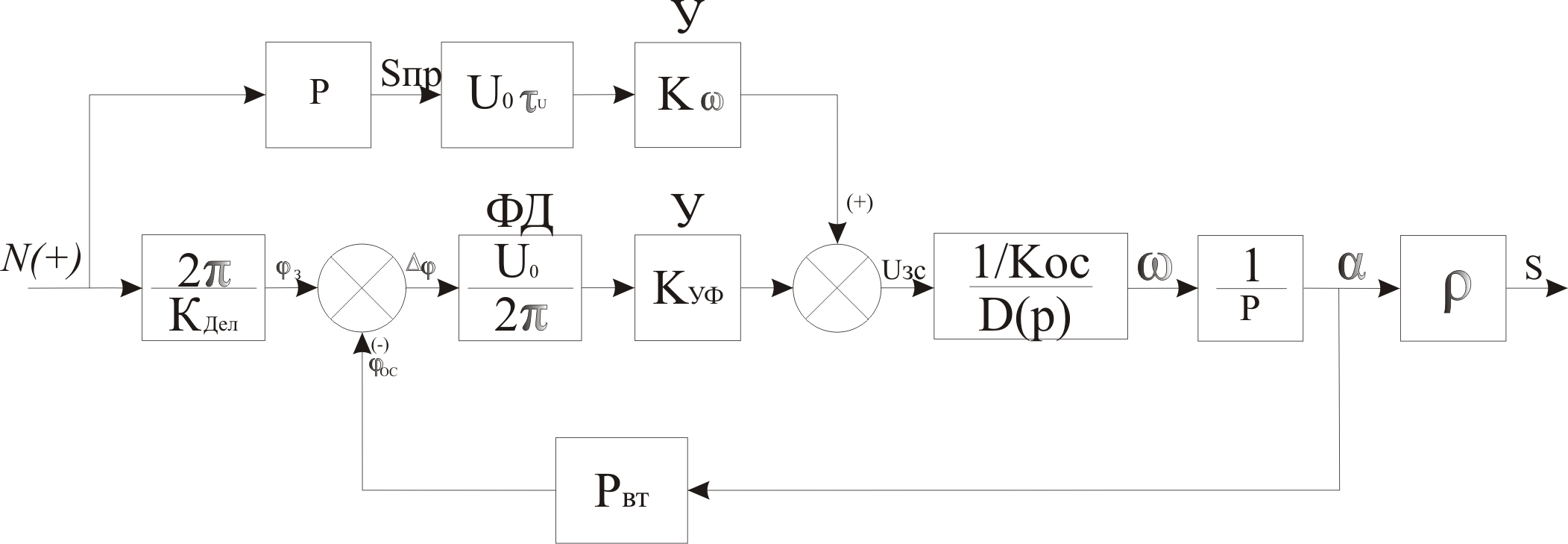
рис. 7.4 Структурная схема СЭП импульсно-фазового типа.
При настройке канала компенсации
скоростной ошибки, необходимо учесть,
что максимальная длительность импульсов
компенсации
![]() не должна превышать период следования
импульсов программы при работе привода
на максимальной частоте следования
импульсов
не должна превышать период следования
импульсов программы при работе привода
на максимальной частоте следования
импульсов![]() .
.
Очевидно, что период следования импульсов
программы
![]() равен 0,0001с, тогда длительность
равен 0,0001с, тогда длительность![]() должна быть не меньше
должна быть не меньше![]() ,
,
![]() ,
,
отсюда при n=10,![]() =0,0001с.
=0,0001с.
Из структурной схемы получим
![]() (установившийся режим непрерывной
заводки),
(установившийся режим непрерывной
заводки),
![]()
![]() ,
(7.3.2)
,
(7.3.2)
откуда можно найти
![]()
![]() .
.
Настройку преобразователя ПЧН (рис.
) на заданную настройку производят
установкой на счётчиках кода
![]() перемычками.
перемычками.