


25
Vа
|
Rpy |
|
|
|
VG |
|
а |
пa |
G |
пG |
Х |
|
|
|
|
|
Vпп |
|
|
|
Rгу |
ПП |
|
|
|
|
|
RцG Rпп
Rа Y
пa пG
О ЦЦ
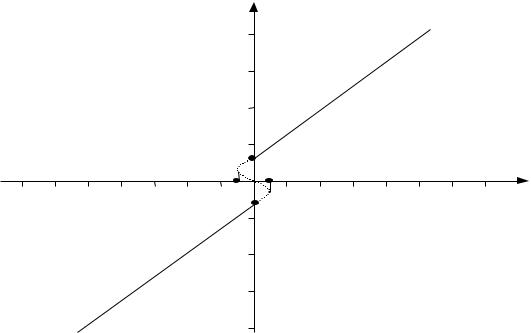
Рисунок 9 - Движение судна на циркуляции
При этом каждая такая точка имеет свой угол дрейфа, значение которого возрастает по мере удаления в сторону кормы. В нос от ЦТ углы дрейфа соответственно уменьшаются. Если же из центра циркуляции О опустить перпендикуляр на диаметральную плоскость (ДП), то в полученной точке будет полюс поворота (ПП), угол дрейфа в котором равен нулю. Эта точка носит название центра вращения или полюса поворота.
Полюс поворота при циркуляции для большинства судов располагается вблизи носовой оконечности - на расстоянии примерно 0.4 длины судна от центра тяжести, принимаемого на мидель-шпангоуте, поэтому угловая скорость начинает быстро возрастать.
Угол дрейфа ЦТ судна на циркуляции определяется по формуле
|
|
arctg( |
пп |
), |
|
|
|
|
|
|
пG |
|
R |
|
|
|
|
пп |
|
(42)
где |
|
пп |
- расстояние полюса поворота от центра тяжести. |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
Для произвольной точки а угол дрейфа будет |
|
||||||||
|
|
|
|
|
arctg( |
|
пп |
|
a |
), |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
пa |
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
пп |
|
|
где |
|
a - расстояние от точки а до центра тяжести (в корму знак «-»). |
||||||||
|
|
|
|
|
|
|
|
|
|
|
(43)
На судах, имеющих крутую циркуляцию, угол дрейфа может достигать 200 и более.
Как уже отмечалось, подъёмная сила пропорциональна углу атаки, а так
26
как углы дрейфа возрастают по длине корпуса в сторону кормы, то точка приложения поперечной гидродинамической силы Rгy по мере искривления траектории смещается в сторону кормы, а момент этой силы Мг постепенно уменьшаясь меняет знак и начинает действовать противоположно моменту руля Мр, т.е. становится демпфирующим. Рост угловой скорости при этом замедляется, а когда моменты Мр и Мг становятся равными по абсолютной величине, угловая скорость стремится к установившемуся значению уст.. Благодаря сопротивлению переложенного руля (сила Rpx) и некоторому увеличению сопротивления корпуса при движении с углом дрейфа, а также проекции Rцх центробежной силы, линейная скорость судна VG постепенно уменьшается, стремясь к некоторому значению Vуст..
Чем лучше поворотливость, т.е. чем большую кривизну имеет траектория, тем больше снижается скорость на циркуляции. В среднем, на крупнотоннажных морских судах при повороте на 900 скорость снижается, приблизительно на 1/3, а при повороте на 1800 – вдвое.
Как вытекает из теоретических представлений и подтверждается практическими наблюдениями на управляемость судна оказывают влияние следующие величины: отношение длины судна к его ширине L/B, отношение осадки к длине T/L, коэффициент общей полноты оп, форма оконечностей судна, дифферент, площадь, форма и размещение руля.
Рассмотрим кратко влияние каждой из перечисленных величин.
Влияние отношения L/B. Увеличение L/B приводит к росту гидродинамической силы Rгy, что ведёт к уменьшению угла дрейфа на циркуляции и, следовательно, к сохранению высокой линейной скорости, так как сопротивление воды при малых углах дрейфа возрастает незначительно. Кроме того, при увеличении L точка приложения силы Rгy смещается в сторону кормы, при этом увеличивается демпфирующее действие момента Mг, входящего в третье уравнение системы (1), что приводит к уменьшению угловой скорости (скорость изменения курса). Таким образом, увеличение L/B значительно ухудшает поворотливость судна.
Влияние отношения T/L. Увеличение T/L тоже приводит к росту силы Rгy, но в то же время точка приложения её смещается в сторону носа, что уменьшает демпфирующее действие момента Mг. В результате при увеличении отношения T/L поворотливость изменяется незначительно.
Влияние коэффициента оп. На поворотливость судна значительно влияет коэффициент продольной полноты , который выражается отношением оп к коэффициенту полноты мидель-шпангоута , т.е. = оп / . Увеличение приводит к уменьшению силы Rгy и уменьшению демпфирующего момента Mг. Поэтому увеличение оп значительно улучшает поворотливость.
Влияние формы носовой и кормовой оконечностей. Значительное влияние на поворотливость оказывает степень подреза штевней, критерием которой является коэффициент полноты диаметральной плоскости. Особенно сильно влияет степень подреза кормы. Чем больше кормовой подрез, тем больше смещается в нос точка приложения силы Rгy, что приводит к улучшению

27
поворотливости. С другой стороны, даже небольшое увеличение площади дейдвуда резко ухудшает поворотливость.
Степень подреза кормы можно охарактеризовать коэффициентом полноты площади погруженной части диаметральной плоскости к, который рассчитывается с учётом величины кормового подреза по формуле
|
|
1 |
f |
k |
|
|
|||
|
|
|
|
|
|
k |
|
LT |
|
|
|
|
||
,
(44)
где fk-площадь кормового подреза, площадь фигуры, заключённой между кормовым перпендикуляром (осью баллера руля) и контуром кормовой оконечности (снимается в масштабе с чертежа бокового вида), м2; L - длина между перпендикулярами, м; T - средняя осадка, м.
Носовой подрез влияет на поворотливость значительно меньше. Если носовой подрез велик как, например, у ледоколов, то поворотливость несколько ухудшается.
Влияние дифферента. Дифферент судна вызывает смещение точки приложения Rгy. Дифферент на нос улучшает поворотливость, но ухудшает устойчивость на курсе, т.е. увеличивает рыскливость. Дифферент на корму ухудшает поворотливость, но увеличивает устойчивость на курсе.
Влияние площади, формы и размещение руля. Форма руля, как уже отмечалось, характеризуется обычно его относительным удлинением р=h2/Sр. Увеличение р при неизменной его площади Sр увеличивает подъёмную(боковую) силу руля Rрy, что приводит к улучшению поворотливости.
Увеличение площади руля Sр также увеличивает подъёмную силу, но в то же время увеличивает и демпфирующее действие руля. Таким образом, увеличение площади руля приводит к улучшению поворотливости при больших углах перекладки, а при малых отклонениях руля поворотливость ухудшается.
Расположение руля относительно винта (винтов) значительно влияет на поворотливость. Если руль расположен в винтовой струе, то скорость натекания воды на руль увеличивается, что вызывает значительное улучшение поворотливости. Эффект винтовой струи проявляется тем сильнее, чем большая площадь руля попадает в поток от винта. Этот эффект проявляется особенно сильно в режиме разгона судна, а по мере приближения скорости к установившемуся для данного режима, его влияние уменьшается.
В зависимости от способов определения, получения и представления характеристик поворотливости различают (рис.10): по способу определения - экспериментальный, расчетный, экспериментально-расчетный; по способу получения – из натурных наблюдений, модельных испытаний в опытовых бассейнах, аналитический и эмпирический; по способу представления данных- в виде графиков и таблиц отрезков, графиков и таблиц перпендикуляров, графиков кривых траекторий ЦТ при циркуляции, таблиц элементов циркуляции.

28
Определения |
Получение |
Представле- |
ние |
|
Эксперимен- |
|
Эксперимен- |
|
|
|
|
|
||||
|
тальный |
|
тально- |
|
|
Расчетный |
|
|||||
|
|
|
|
расчетный |
|
|
||||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Натурные |
|
Модельные |
|
|
Аналитиче- |
|
|
Эмпириче |
|||
|
наблюдения |
|
испытания в |
|
|
ские |
|
|
ские |
|||
|
|
|
бассейнах |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Графиков и |
|
Графиков и |
|
Графиков кривых |
|
Табл. эле- |
таблиц отрез- |
|
таблиц пер- |
|
траекторий ЦТ при |
|
ментов цир |
|
|
|
|
|
|
|
ков |
|
пендикуляров |
|
циркуляции |
|
куляции |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 10 - Классификация методов определения характеристик поворотливости
Для характеристики поворотливости судна в период установившейся циркуляции используют диаграмму управляемости [4-10], которую представляют обычно в виде зависимости ( ) , приведенную на рисунке 11.
Диаграмма управляемости теоретически обладает симметрией, однако, на практике она нарушается из-за наличия боковой силы винта, обусловленной неравномерностью попутного потока. Поведение судна при движении постоянным курсом определяется видом начального участка диаграммы управляемости. Приведенная на рисунке 11 диаграмма характерна для теоретически неустойчивого судна. Область неустойчивости существует только вблизи начала координат. Ее определяют углом обратной перекладки руля ро
[3-6] |
и |
угловой |
скоростью |
обратной |
поворотливости |
о. |
29
|
|
|
|
|
|
|
|
|
0.8 |
|
|
|
|
|
|
0.6 |
|
|
|
|
|
|
0.4 |
|
|
|
|
|
|
0.2 |
|
|
|
|
|
|
|
о |
|
|
|
|
|
- |
|
|
|
|
|
|
ро |
ро |
|
|
|
30 |
20 |
10 |
10 |
20 |
30 |
|
|
|
|
- о |
|
|
|
|
|
-0.4 |
|
|
|
|
|
|
-0.6 |
|
|
|
|
|
|
-0.8 |
|
|
|
|
Рисунок 11 - Диаграмма управляемости теоретически неустойчивого судна
2.4. Определение характеристик поворотливости из эксперимента
Экспериментальный способ определения характеристик поворотливости более трудоемок, по сравнению с определением характеристик торможения, поскольку требует более точных способов траекторных измерений и значительной продолжительности по времени их выполнения.
Для получения данных о поворотливости судна предусматривают выполнение следующих маневров:
–циркуляция;
–спираль (прямая и обратная);
–симметричный зигзаг;
–несимметричный зигзаг.
Программа испытаний и ее объем зависят от того, какие данные о характеристиках поворотливости необходимо получить. Если необходимо получить полное представление о них, то значения скорости и углов перекладки руля определяется количеством характерных точек, которых достаточно для построения надежных зависимостей. Обычно подробный объем испытаний проводят для головных судов серии. Для последующих судов ограничиваются меньшим числом контрольных маневров, позволяющих судить о тождественности маневренных характеристик головного и типового судов.
Последовательность выполнения испытательных маневров существенного значения не имеет. Рекомендуется начинать испытания с наибольших скоростей хода. Перекладку руля в процессе испытаний производят как на правый, так и на левый борт. Это обусловлено тем, что элементы поворотливости зависят от боковых сил, возникающих на винте (винтах), и
30
технологической не симметрии судна.
Маневр “циркуляция” обычно выполняют для углов перекладки руля на 15 и 35 градусов при максимальной, средней и малой скоростях движения. На судах с ДВС при больших скоростях движения возникают перегрузки двигателей. Чтобы не изменять положение регуляторов подачи топлива рекомендуется испытания проводить при маневренном режиме.
Маневр “циркуляция” состоит из трех периодов: маневренный; эволюционный; установившийся. Маневренный период начинается от момента подачи команды на перекладку руля до момента окончания перекладки руля на заданный угол. Эволюционный период начинается, от момента окончания перекладки руля и заканчивается, когда элементы движения судна перестанут изменяться во времени. Установившийся период начинается с момента окончания второго периода и длится все время, пока руль находится в переложенном положении. Между вторым и третьим периодом резкой границы провести не представляется возможным, поэтому в практике судовождения считают, что установившееся движение наступает при повороте судна на 1800.
По результатам выполнения маневра получают значения геометрических
элементов кривой циркуляции |
|
1 |
|
|
2 |
|
Dт и |
Dy и зависимости |
|
|
|
|
|
|
|
времени поворота от угла курса при различных скоростях и углах перекладки руля.
Маневр “Спираль” выполняют в следующей последовательности: при движении судна с постоянным курсом и скоростью перекладывают руль на 300 вправо и удерживают в таком положении до тех пор, пока не установится постоянное значение угловой скорости с. При достижении постоянного значения сi уменьшают угол перекладки руля на 50 и выдерживают его в таком
положении до момента достижения постоянного значения сi+1. Процедуру повторяют до тех пор, пока руль не будет переложен на 50. В зоне перекладки50 угол изменяют на 10 или 20, как позволяет указатель положения пера руля. Маневр повторяют аналогично на левый борт (обратная спираль) до углов 300. В процессе маневрирования регистрируют скорость судна, угол перекладки руля и угловую скорость. По результатам испытаний строят диаграмму управляемости = f ( и получают данные о зоне неустойчивости 0 и ро.
Маневр “зигзаг” выполняют на маневренном и среднем ходу. Порядок выполнения следующий: при движении судна постоянным курсом и скоростью перекладывают руль на 200 правого борта и выдерживают его в таком положении до тех пор, пока курс не изменится на 200; в момент изменения курса на 200 вправо перекладывают руль на 200 левого борта и ожидают изменения курса на 200 влево относительно первоначального. Процедуру повторяют не менее пяти раз на каждый борт. В процессе испытаний регистрируют моменты времени, когда происходят манипуляции с рулем и изменения курса, включая прохождение через линию первоначального и скорость судна в соответствующие моменты. Результаты испытаний маневра “Симметричный зигзаг” используют для нахождения коэффициентов математических моделей, описывающих движение судна.
31
Для получения данных о маневренных характеристиках производят испытания мореходных качеств после постройки судна перед сдачей в эксплуатацию. Назначением таких испытаний является как проверка проектных решений, которые приняты при постройке судна, так и получение данных, которыми необходимо обеспечить судно в соответствии с рекомендациями ИМО и требованиями национальных нормативных документов. Порядок выполнения указанных испытаний определяется специальными программами, которые составляются конструкторским бюро при проектировании судна, и согласовываются с заводом строителем и заказчиком.
В зависимости от целей, которые ставятся перед производством сдаточных натурных наблюдений, все испытания судов можно разделить на три группы: пропульсивные, маневренные и мореходные.
Полностью пропульсивные испытания судов производят крайне редко. Обычно ограничиваются определением скорости при различных режимах работы главной силовой установки. Результаты скоростных испытаний позволяют получить следующие данные:
–зависимость между частотой вращения гребных винтов и скоростью судна, при водоизмещении в грузу и в балласте, на тихой воде;
–значение наибольшей скорости хода при номинальной нагрузке главных двигателей;
–зависимость мощности на гребном валу и упора винта от частоты его вращения.
Обычно при выполнении скоростных испытаний производят калибровку лага и строят ходовые паспортные диаграммы судна для различных условий его эксплуатации.
Основные параметры циркуляции можно получить из натурных наблюдений, а также по эмпирическим формулами, при этом параметры
выражаются в длинах корпуса судна L .
1 6.41 |
|
|
0.7 0.93 |
(45) |
|
|
|
|
|||
|
|
||||
|
|
|
|
|
|
|
|
5.84 |
|
0.68 2.15 |
(46) |
||||||||||
2 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
DT |
11.75 |
|
|
|
|
|
|
1.35 3.9 |
(47) |
||||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
Dy |
11.61 |
|
|
|
|
|
|
|
1.2 |
4.31 |
(48) |
||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где Ф - фактор руля и корпуса; |
|
|
- угол перекладки руля в градусах; - угол |
||||||||||||
дифферента в градусах, определяется по формуле |
|
||||||||||||||
|
|
|
T K T H |
57.3; |
|
||||||||||
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
32
или
где
Фактор руля и корпуса учитывает различные характеристики судна, так
иначе влияющие на поворотливость судна, и определяется из выражения |
|||||||
|
|
|
|
|
|
|
|
|
|
L |
B |
|
2 |
|
|
|
|
|
|
|
|||
|
|
|
|
K |
(49) |
||
|
|
|
|
|
|||
|
S |
|
% |
||||
|
|
p |
p |
||||
|
|
|
|
|
|
||
K |
- коэффициент полноты ДП, рассчитывается по площади подреза кормы; |
||||||
Sp% - относительная площадь поворотной части пера руля в процентах от площади погруженной части ДП; p - относительное удлинение руля.
Коэффициент K определяется из выражения
|
|
1 |
|
f |
K |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
K |
|
L |
|
T |
|
|
|
|
|
cp |
||
|
|
|
|
|
,
(50)
где fK - площадь кормового подреза, ограниченного кормовым перпендикуляром, базовой линией и контуром кормы, включая кронштейн полуподвесного руля.
Относительное удлинение руля рассчитывается по формуле |
|
|
p hp |
2 S p , |
(51) |
где: hp - высота руля, м; Sp - площадь пера руля без кронштейна. Относительная площадь пера руля определяется по формуле
S |
|
% |
S |
p |
|
|
|
|
|||
|
|
|
|
|
|
|
p |
|
L T |
|
|
|
|
|
cp |
||
|
|
|
|
|
|
100%
.
(52)
Для уточнения расчетных параметров циркуляции выполняют эксперимент и определяют значения переходных коэффициентов
|
|
|
|
|
1 |
э 1 p 1
; |
|
|
2
э 2 p 2
; |
|
|
|
|
D |
э |
|
|
|
|
|
T |
||
|
|
||
D |
|
|
p |
T |
|
D |
|
|
|
|
|
|
|
T |
|
; |
|
|
|
D |
э |
|
|
y |
|
|
|
||
|
|
|
|
Dy |
|
D |
p |
|
|
y |
|
|
|
|
(53)
Примечание: Если в задании результаты эксперимента не приведены, то переходные коэффициенты принимать равными единице. Если на судне 2 руля, то при расчете Sp% по формуле (52) значение Sp умножают на 2.
Для построения траекторий на циркуляции существует три способа – отрезков, перпендикуляров и эллипса.
По результатам эксперимента профессор Мальцев А.С. предложил [5] метод определения отрезков МН и МК через вспомогательные значения коэффициентов а1 и в1
МН а |
в |
tg ( / 2), |
|
1 |
1 |
|
|
МK а2 |
в2 |
tg ( / 2). |
(54) |
В выше приведенных формулах значения коэффициентов поворотливости
33
а |
, в |
, а |
2 |
, в |
2 |
1 |
1 |
|
|
можно приблизительно определить по формулам:
а |
|
|
D |
|
|
D |
|
0; в |
|
|
|
|
T |
; в |
T |
; a |
|
. |
|||||
1 |
|
|
2 |
||||||||
1 |
|
2 |
1 |
|
2 |
2 |
2 |
|
|
||
|
|
|
|
|
|
|
|
|
|
Недостатком способа отрезков является ухудшение точности нанесения траектории при углах поворота более 1500.
По характеристикам отрезков можно получить приближенные зависимости для расчета координат методом перпендикуляров, которые имеют вид
НР |
|
|
D |
tg( / 2) |
|
|
tg( / 2) cos ; |
|
|
T |
|
||||||
1 |
2 |
2 |
||||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
KP |
2 |
tg( / 2) sin |
. |
(55) |
|
|
|||
Способ перпендикуляров дает возможность |
построения |
траектории для |
||
углов поворота без ограничений. Недостатком способа является невозможность определить координаты начала поворота относительно точки М пересечения путей, до и после поворота, положение которой известно. Поэтому приходится определять точку начала поворота отрезков, а затем наносить траекторию относительно точки начала поворота методом перпендикуляров.
Метод эллипса используется для аналитического расчета плановой
траектории по геометрическим элементам циркуляции |
|
, |
2 |
, D |
и |
D |
1 |
|
T |
Y . Он |
позволяет получить точки для любого значения угла поворота. Уравнение эллипса можно представлять в виде зависимости:
Х а cos |
и У в sin . |
|||
где: а и в– полуоси эллипса; |
|
- угол поворота. |
|
|
|
|
|||
Термин “маневренные |
качества |
судна” |
включает в себя, как уже |
|
отмечалось, характеристики торможения и управляемости. Для проведения качественных испытаний необходимо кроме выполнения требований к погодным условиям (сила ветра не более 4 баллов, волнение моря не более 3 баллов по шкале Бофорта), необходимости отсутствия течения и глубине моря
Н (должна быть больше чем вычисленная по формуле Н 4 |
B Tср |
и Н 0.35· V |
2 |
, |
|
|
|
|
|
|
|
|
c |
|
где В, Тср и Vс - ширина, средняя осадка и скорость судна в м/с), требуется обеспечить высокую точность траекторных измерений. При использовании плавающего ориентира и определении расстояния до него с помощью РЛС или по углу снижения, измеренного с помощью секстана, удается получить оценки среднеквадратической погрешности равные 6-10 метрам. Использование плавающего ориентира позволяет существенно уменьшить влияние течения на точность определения характеристик торможения и поворотливости. Последнее время при сдаточных испытаниях используют методы определения места по спутниковым системам, работающим в дифференциальном режиме. Они позволяют определить место судна со СКП, достигающей 3-5 метров.