

Острецов А.В., Бернацкий В.В., Есаков А.Е. Роботизированные коробки передач. Конструкция
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ
Государственное образовательное учреждение высшего профессионального образования
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ МАШИНОСТРОИТЕЛЬНЫЙ УНИВЕРСИТЕТ (МАМИ)
А.В. Острецов, В.В. Бернацкий, А.Е. Есаков
РОБОТИЗИРОВАННЫЕ КОРОБКИ ПЕРЕДАЧ И ВАРИАТОРЫ
КОНСТРУКЦИЯ
Допущено Учебно-методическим объединением вузов по университетскому политехническому образованию в качестве учебного пособия для студентов высших учебных заведений, обучающихся по специальности
«Наземные транспортно-технологические средства»
Под общ. редакцией Засл. деятеля науки РФ, д.т.н.,
проф. В.М. Шарипова
Москва 2014
2
УДК 629.113 – 685
А.В. Острецов, В.В. Бернацкий, А.Е. Есаков. Роботизированные коробки передач. Конструкция/ Под общ. ред. В.М. Шарипова.– М.: Тракторы и сельхозмашины, 2014. – 95 с.
В учебном пособии рассмотрены особенности конструкций и принципы работы роботизированных коробок передач, клиноремённых и тороидных вариаторов, их преимущества и недостатки.
Рецензенты: начальник отдела тяжёлых наземных комплексов НПЦ СМ МГТУ им. Н.Э. Баумана, д.т.н., проф. Б.Н. Белоусов; профессор кафедры «Тракторы и автомобили» МГАУ им. В.П. Горячкина, Заслуженный деятель науки и техники РФ, д.т.н., проф. Г.М. Кутьков.
©А.В. Острецов, В.В. Бернацкий, А.Е. Есаков, 2014
©Московский государственный машиностроительный университет (МАМИ) /Университет машиностроения/, 2014
©Тракторы и сельхозмашины, 2014
3
ОГЛАВЛЕНИЕ
Введение .................................................................................................. |
.. 5 |
|
1. Роботизированные коробки передач ............................................... |
6 |
|
1.1 |
Особенности конструкций роботизированных коробок передач |
... 7 |
1.2 |
Принцип работы роботизированной коробки передач .................... |
9 |
2. Преселекторные коробки передач (коробки передач с двойным |
|
|
сцеплением) …………………………………………………………… |
. 13 |
|
2.1.Преимущества и недостатки преселекторных коробок передач . 15
2.2.Особенности конструкции преселекторной коробки передач с
двойным мокрым сцеплением ............................................................... |
17 |
2.2.1. Система переключения передач .................................................. |
22 |
2.2.2. Система управления сцеплением и коробкой передач ............. |
24 |
2.3. Особенности работы преселекторной коробки передач с двойным |
|
мокрым сцеплением ................................................................................ |
30 |
2.3.1. Процесс трогания автомобиля с места ........................................ |
31 |
2.3.2. Процесс переключения на понижающую передачу с пропуском |
|
нескольких передач (на несколько ступеней вниз) .............................. |
34 |
2.3.3. Блокирование трансмиссии на стоянке ....................................... |
34 |
2.3.4. Буксирование автомобиля............................................................. |
36 |
2.3.5. Защитные функции работы коробки передач и двойного |
|
мокрого сцепления .................................................................................. |
37 |
2.4. Особенности конструкции и работы преселекторной коробки |
|
передач с двойным сухим сцеплением ................................................. |
38 |
2.4.1. Особенности конструкции сцепления и коробки передач ........ |
38 |
2.4.2. Система переключения передач .................................................. |
44 |
2.4.3. Особенности системы управления преселекторной коробкой |
|
передач с двойным сухим сцеплением ................................................. |
47 |
3. Вариаторы .......................................................................................... |
51 |
3.1. Преимущества трансмиссий с вариаторами................................... |
54 |
3.2. Недостатки трансмиссий с вариаторами ....................................... |
55 |
3.3. Конструкция и принцип работы трансмиссии с клиноремённым |
|
вариатором................................................................................................ |
56 |
3.3.1. Фрикционы переднего и заднего хода ........................................ |
58 |
3.3.2. Планетарный механизм ................................................................. |
63 |
3.3.3. Конструкция и принцип работы вариатора ................................ |
65 |
3.3.4. Регулирование силы сжатия дисков шкивов в зависимости от |
|
передаваемого крутящего момента........................................................ |
71 |
4 |
|
3.3.5. Регулирование силы сжатия дисков шкивов в зависимости от |
|
передаточного отношения ...................................................................... |
74 |
3.3.6. Компенсирование динамического нагнетания давления масла 75
3.3.7. Система охлаждения масла........................................................... |
77 |
3.3.8. Шток выбора передач.................................................................... |
78 |
3.3.9. Система управления коробкой передач с клиноремённым |
|
вариатором................................................................................................ |
79 |
3.4. Буксирование автомобиля................................................................ |
87 |
3.5. Принцип работы тороидного вариатора ........................................ |
88 |
Список литературы .............................................................................. |
94 |
5
Введение
Общеизвестно, что автоматизация процесса управления автомобилем является одним из радикальных средств повышения безопасности его движения. Объектами автоматизации в автомобиле являются системы управления трансмиссией, тормозами, подвесками.
Автоматизация управления трансмиссией автомобиля связана, как правило, с разработкой автоматических и автоматизированных систем управления сцеплениями и коробками передач (КП), а также систем распределения мощности между колёсами автомобиля.
В настоящее время на легковых автомобилях получили широкое распространение автоматизированные механические КП (роботизированная и преселекторная) и вариаторы.
Роботизированные КП – наиболее дешевые (по себестоимости) и простые (по конструкции) автоматизированные трансмиссии в массовом производстве. В основном, они применяются на компактных ав-
томобилях типа Peugeot 207 (2011 г.), Citroen C3 (2010 г.), Toyota Corolla (2007 г.) и др.
Преселекторные КП (DCT – dual clutch transmission) первона-
чально устанавливались на гоночные прототипы Porsche 956 (1982 г.)
и962 (1984 г.). В массовом производстве они появились в 2003 г. на автомобилях VW Golf 32 IV поколения и Audi TT. В настоящее время эти КП устанавливаются на модели большинства автопроизводителей мира: Audi, Bugatti, Ford, Merсedes-Benz, Nissan, Porsche, Volkswagen
имногие др.
Трансмиссия с вариатором (CVT – Continuously Variable Transmission) была впервые установлена на автомобиль DAF-600 в 1958 г. голландским инженером Хубом Ван Доорном. Она была весьма несовершенна и ненадёжна. Только в 90-е годы ХХ века в связи с бурным развитием электроники и в результате разработки надёжного толкающего металлического ремня и толкающей металлической пластинчатой цепи, а также, вследствие внедрения автоматизированных систем управления прижимными муфтами шкивов вариатора, трансмиссии с вариаторами получили широкое распространение в массовом производстве автомобилей.
Тороидные вариаторы по конструкции и технологии изготовления существенно сложнее, а по себестоимости – выше, чем клиноремённые вариаторы, поэтому в настоящее время в автомобилестроении не применяется.
6
1. Роботизированные коробки передач
Роботизированная коробка передач (РКП) представляет собой механическую коробку передач (МКП), в которой функции выключения сцепления и переключения передач автоматизированы.
Преобразование МКП в автоматическую путём введения в конструкцию двух приводов, которые управляют сцеплением и КП, позволило получить самую дешевую (по себестоимости) автоматизированную трансмиссию для массового производства автомобилей. Такой тип трансмиссии обеспечивает прямую связь между колесами и двигателем, позволяя практически без потерь реализовывать запас мощности и крутящего момента.
РКП сочетает в себе преимущества автоматической и механической КП:
-удобство и лёгкость управления автомобилем. Автоматический режим снижает усталость водителя и обеспечивает возможность комфортного управления автомобилем практически в любых условиях движения.
-обеспечивает автомобилю хорошую динамику разгона (у лучших образцов время переключения передач вверх составляет 0,05… 0,06 с), высокую эффективность передачи мощности к ведущим колёсам (высокий КПД, как и у МКП - 98…99 % ) и практически одинаковую топливную экономичность с автомобилями, оборудованными МКП;
-простоту конструкции, хорошую ремонтопригодность и высокий уровень безотказности, так как основу её конструкции составляет базовая МКП;
-относительно низкую себестоимость. Например, себестоимость РКП 2-Tronic Citroen выше себестоимости базовой МКП примерно на
15 тыс. руб. [17];
-бó льший срок службы силового агрегата и трансмиссии автомобиля по сравнению с трансмиссией с МКП.
При этом РКП бюджетных автомобилей значительно дешевле классических автоматических КП (АКП), но им присущи недостатки, связанные с применением простых и дешевых систем управления сцеплением и КП:
- большое время переключения передач (0,3…0,5 с) в случае динамичного движения автомобиля, когда необходимо быстрое ускорение (например, при обгоне или перестроении в более скоростной ряд), для чего требуется переключение передач на одну или две ступени вниз.
7
Этот недостаток проявляется на автомобилях, имеющих относительно высокую массу, с двигателями, не обеспечивающими достаточного запаса мощности при низкой частоте вращения коленчатого вала; - недостаточная плавность работы КП в городских условиях (с рывками и «провалами») из-за частого переключения передач (вниз - вверх), что снижает комфортабельность движения. Для повышения плавности работы КП в алгоритм управления сцеплением на время переключения передач введена функция принудительного буксования сцепления. Это, в свою очередь, привело к необходимости сохранения работоспособности сцепления путём разрыва потока мощности на довольно продолжительное время, что вызывает «провалы» при
разгоне автомобиля.
Устранение указанных недостатков связано с сокращением времени разрыва потока мощности от двигателя к ведущим колёсам, что требует совершенствования системы управления КП и приводит к росту себестоимости автомобиля.
1.1. Особенности конструкций роботизированных коробок передач
РКП состоит из следующих общих составных частей конструкции:
-сцепления фрикционного типа;
-МКП;
-приводов сцепления и КП;
-системы управления.
Сцепление может быть сухим одноили двухдисковым и мокрым
многодисковым. РКП могут иметь электромеханические или электрогидравлические приводы управления сцеплением и переключением передач. В первом случае РКП называются собственно роботизированными КП, а во втором – секвентальными КП (от sequensum – последовательность), что связано с последовательным переключением передач в полуавтоматическом (ручном) режиме управления КП.
При электромеханическом приводе исполнительными органами являются сервоприводы – актуаторы. Электрогидравлический привод осуществляется с помощью гидроцилиндров, которые управляются электромагнитными клапанами.
Электромеханический привод отличает невысокое время переключения передач (0,3…0,5 с), но и относительно небольшое энерго-
8
потребление, что предопределило его применение на бюджетных автомобилях.
Электрогидравлический привод предполагает постоянное поддержание давления в системе, а значит большие затраты энергии, но его отличает высокое быстродействие, поэтому им оборудуются дорогие автомобили. Время переключения передач секвентальных КП, устанавливаемых на спортивные автомобили (например, Ferrari 599 GTO, Lamborghini Aventador), составляет 0,05…0,06 с.
В основу конструкций РКП положены МКП и в их производстве используются, в основном, готовые технические решения. Например,
секвентальная КП SMG (Sequential M Gearbox) BMW – на базе 6-и
ступенчатой МКП, оборудованной электрогидравлическим приводом сцепления, а РКП 2-Tronic Citroen – на базе 5-и ступенчатой МКП, оборудованной электромеханическим приводом.
Система управления КП включает входные датчики, электронный блок управления (ЭБУ КП), исполнительные механизмы и селектор.
Входные датчики отслеживают основные параметры коробки передач: частоту вращения на входе и выходе, положение вилок включения передач, положение селектора, а также давление и температуру масла (для гидравлического привода) и передают их в ЭБУ КП.
На основании сигналов датчиков электронный блок управления КП формирует управляющие воздействия на исполнительные механизмы в соответствии с заложенной программой. В своей работе ЭБУ КП взаимодействует с системами управления двигателем, ESP, ABS и др.
ЭБУ КП контролирует все функции: режим работы двигателя, автоматический режим работы КП, безопасность и индикацию на панели приборов. Он диагностирует возможные неисправности КП и сцепления и в случае необходимости восстанавливает работу нарушенных функций.
ЭБУ КП учитывает и анализирует все параметры, необходимые для обеспечения корректного переключения передач: массу и скорость движения автомобиля, состояние и профиль дороги (спуск, подъём, поворот), частоту вращения коленчатого вала двигателя и первичного вала КП, положение селектора, педалей тормоза и подачи топлива, угол поворота рулевого колеса, а также температуру двигателя.
9
Для того чтобы автомобиль тронулся с места, ЭБУ КП включает сцепление в зависимости от позиции педали подачи топлива и режима работы двигателя.
Во избежание слишком частых переключений, изменения передач осуществляются с различными скоростями при увеличении и уменьшении скорости движения.
В секвентальных КП в систему управления дополнительно включен гидравлический блок управления, который обеспечивает непосредственное управление гидроцилиндрами и давлением в системе.
Исполнительными механизмами в зависимости от типа привода являются актуаторы (шаговые электродвигатели с редукторами) или электромагнитные клапаны гидроцилиндров.
Селектор не имеет жесткой связи с коробкой передач. Его положение оценивается соответствующим датчиком, который приводит в действие определенный алгоритм управления КП.
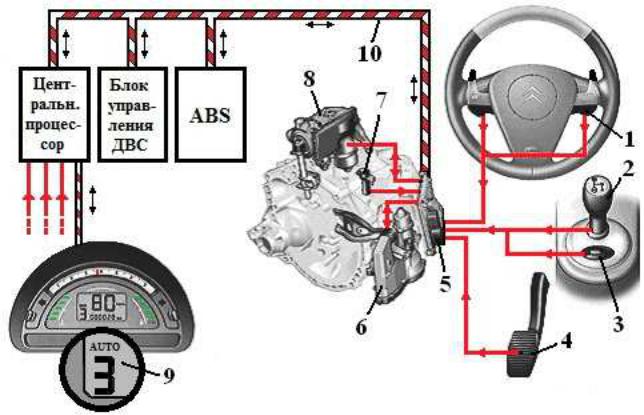
1.2. Принцип работы роботизированной коробки передач
На рис. 1,а показана схема системы управления РКП 2-Tronic автомобиля Citroen C3, а на рис. 1,б – общий вид самой коробки, в которой применены электромеханические приводы управления сцеплением и КП.
Работа РКП 2-Tronic концерна «Peugeot-Citroen» может осуществляться в одном из трёх режимов [17]: полностью автоматическом («Auto»), ручном (секвентальном) и автосеквентальном. Полностью автоматический или ручной режимы работы могут быть включены на любое необходимое водителю время, а автосеквентальный – только на короткое время (до 10 с), в течение которого водитель должен произвести действия в соответствии со своими намерениями.
Вполностью автоматическом режиме ЭБУ КП 5 реализует управление КП с помощью исполнительных механизмов 6 и 8, используя набор программ-алгоритмов переключения передач. Выбор определённой программы позволяет адаптировать работу РКП 2- Tronic к стилю управления автомобилем. Например, при плохом сцеплении шин с дорогой включается программа «зимний режим» и на дисплее панели приборов загорается символ «*».
Вавтоматическом режиме обеспечиваются:
-включение нейтрального положения КП (только селектором);
-пуск двигателя (только при нажатой педали тормоза и положении «N» селектора КП);
10
-включение передачи заднего хода КП (только селектором и в случае, если автомобиль стоит на месте и нажата педаль тормоза). При её включении звучит сигнал зуммера;
-сохранение включённой передачи или её понижение для увеличения эффективности торможения двигателем;
-выбор шага изменения повышающей передачи при движении на поворотах;
-автоматический перевод КП в нейтральное положение в случае длительной (3...5 мин) остановки автомобиля с работающим двигателем и включенной 1-й передачей в КП;
-получение максимального ускорения движения автомобиля (понижение передачи) при резком нажатии на педаль подачи топлива
(режим «kick down»).
Вавтоматическом режиме на дисплее 9 панели приборов включается надпись «Auto» в дополнение к информации о включенной передаче.
Алгоритм управляющих воздействий ЭБУ КП в этом режиме осуществляется в следующей последовательности:
- уменьшение передаваемого крутящего момента;
а)