

Вычисление работы сил
![]()
![]()
или
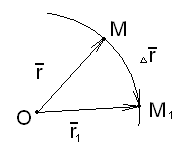
Элементарная работа силы равна:
![]()
![]()
Полная работа силы вычисляется через интеграл
и ли
ли
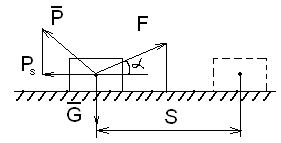
Работа силы в некоторых случаях
Сила постоянна по величине. Точка или тело движется прямолинейно.
![]()
Знаки работы:
при α < 90°; A > 0
при α = 90°; A = 0
при 90° < α < 180°; A < 0
Р
 абота
силы тяжести.
абота
силы тяжести.
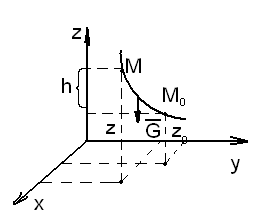
![]()
![]()

![]()
Работа силы при вращательном движении тела вокруг неподвижной оси.
![]()
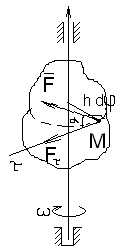
Е![]() сли
М =
const, то
сли
М =
const, то
Работа силы упругости пружины.
![]()
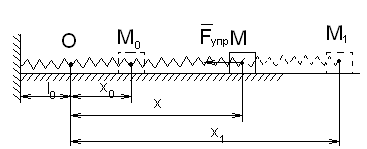
![]()

![]()
Если x0 = 0, то
Единицей измерения
работы в СИ
является –
![]()
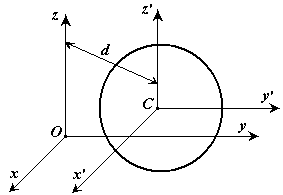
Установим зависимость между моментами инерции относительно параллельных осей, одна из которых проходит через центр масс.
Теорема о моментах инерции относительно параллельных осей. (Теорема Штейнера)
Момент инерции
системы относительно какой-либо оси
равен моменту инерции относительно
параллельной оси, проходящей через
центр масс, плюс произведение массы
системы на квадрат расстояния между
этими осями.
![]()
Доказательство:
Пусть имеется две декартовы системы
координат
и
![]() ,
оси которых параллельны. Начало системы
находится в центре масс системы. Докажем
теорему для осей
и
,
оси которых параллельны. Начало системы
находится в центре масс системы. Докажем
теорему для осей
и
![]() .
.
![]()
![]()
Координаты связаны между собой соотношениями:
![]() ,
, ![]() ,
, ![]()
Работа силы. Мощность.
Одна из основных характеристик силы, оценивающих действие силы на тело при некотором его перемещении.
Э лементарная
работа силы
скалярная величина равная произведению
элементарного перемещения на проекцию
силы на это перемещение.
лементарная
работа силы
скалярная величина равная произведению
элементарного перемещения на проекцию
силы на это перемещение.
![]() .
.
![]() ,
,
![]()
Элементарная работа силы равна скалярному произведению силы на элементарное перемещение или на дифференциал радиуса вектора точки приложения силы.
![]()
Элементарная работа силы равна скалярному произведению элементарного импульса силы на скорость точки.
![]()
Мощностью силы называется величина, определяющая работу, совершаемую силой в единицу времени. В общем случае мощность равна первой производной по времени от работы.
![]() ,
, ![]()
Мощность равна скалярному произведению силы на скорость.
Единицей измерения
мощности в СИ является –
![]()
В технике за единицу
силы принимается
![]() .
.
Теорема об изменении кинетической энергии системы.
Эта теорема существует в двух формах.
Теорема. Дифференциал кинетической энергии системы равен сумме элементарных работ всех внешних и внутренних сил, действующих на систему.
![]()
Теорема. Изменение кинетической энергии системы при ее перемещении из одного положения в другое равно сумме работ всех внешних и внутренних сил, действующих на систему, на соответствующих перемещениях точек системы при том же перемещении системы..
![]()
Теорема Кенига. Кинетическая энергия системы в абсолютном движении складывается из кинетической энергии центра масс, если в нем сосредоточить всю массу системы, и кинетической энергии системы при ее движении относительно центра масс.
![]()
Вычисление обобщённых сил
Если система имеет n степеней свободы, то у неё n обобщённых координат, независимых друг от друга (q1, q2, …, qn) и n возможных перемещений (δq1, δq2, …, δqn). Сумма элементарных работ, приложенных к системе сил, на возможные перемещения системы равна
![]() .
.
Обобщёнными силами называются коэффициенты, стоящие перед соответственными возможными перемещениями. Так как обобщённые координаты не зависят друг от друга, то для определения обобщённой силы системе необходимо сообщить возможные перемещения, соответствующие координатам, а все остальные возможные перемещения принять за нуль, то есть для определения Q1 необходимо, чтобы δq1 ≠ 0, δq2 = 0, δq3 = 0, …, δqn = 0, тогда
![]()
 .
.
Размерность обобщённых сил зависит от размерности обобщённых координат: если qj = x (м), то Qj – сила (Н); если qj = φ (рад), то Qj – момент (Н∙м).