

Свойство саморегулирования вращающего момента в соответствии с нагрузкой на валу.
Асинхронные двигатели обладают свойством саморегулирования. Оно заключается в следующем: при изменении противодействующего момента (момента сопротивления), создаваемого рабочим механизмом, автоматически изменяется вращающий момент двигателя и восстанавливается нарушенное равновесие моментов на валу.
Установившийся режим работы двигателя с постоянной скоростью вращения возможен только при равенстве моментов на валу – электромагнитного вращающего момента М и противодействующего момента (момента сопротивления) Мс.
Если внезапно увеличится противодействующий момент, то ротор начнет тормозиться. Скорость вращения ротора n будет падать, а скорость его скольжения относительно вращающегося поля, равная n1 – n будет возрастать. При увеличении скорости скольжения будет увеличиваться ЭДС, наводимая в обмотках ротора и активные составляющие тока в проводниках ротора. В свою очередь, увеличение тока ротора приводит к увеличению электромагнитных сил и момента, действующих на ротор. С ростом вращающего момента уменьшение скорости ротора замедлится, а затем и вовсе прекратится и наступит повторно равновесие моментов: скорость ротора установится на новом, более низком уровне.
Уравнения двигателя.
Первый случай. Обмотка статора включена в сеть. Цепь ротора разомкнута.
В этом случае ротор не вращается n = 0. Под действием подведенного к статору напряжения U1по обмотке статора течет ток холостого хода, создающий вращающийся магнитный поток. Вращающийся магнитный поток наводит в обмотках статора ЭДС Е1, величина которой практически равна приложенному напряжению U1. (Падением напряжения на активном сопротивлении обмотки статора и ЭДС рассеянья можно пренебречь).
![]() ,
,
где w1 – число витков обмотки статора;
kо1 – обмоточный коэффициент;
Фm – амплитуда магнитного потока.
![]() ,
,
где I1 – ток статора;
r1, x1 – активное и реактивное сопротивление обмотки статора.
![]()
![]()
![]() .
.
В асинхронном двигателе основной магнитный поток статора определяется главным образом приложенным напряжением. Основной поток наводит в фазе ротора ЭДС Е2.
Второй случай. Обмотка статора включена в сеть. Ротор замкнут и заторможен.
В этом случае ЭДС Е2 вызывает в короткозамкнутой обмотке ротора ток I2. Этот ток образует магнитное поле, которое вращается с той же скоростью, что и создающий его ток ротора.
![]() ,
,
где I2 – ток ротора;
r2, x2 – активное и реактивное сопротивление обмотки ротора.
Модуль тока ротора определяется как:
![]() .
.
При этом частота ЭДС ротора равна f2 =f. Следовательно, скорости полей статора и ротора одинаковы, т.е. эти поля неподвижны друг относительно друга. При заторможенном роторе частота ЭДС Е2 и тока I2 равна частоте питающей сети, т.е. 50 Гц.
Ток статора I1, потребляемый двигателем, превышает его номинальное значение в 4-7 раз. Поэтому двигатель не должен оставаться длительно в заторможенном состоянии во избежание чрезмерного нагревания и возможного выхода его из строя.
Третий случай. Обмотка статора включена в сеть. Ротор замкнут и вращается.
Несмотря на то,
что ротор вращается скорости полей
статора и ротора одинаковы, т.е. эти поля
неподвижны относительно друг друга.
Частота ЭДС (тока), наводимой полем в
роторе, равна частоте сети, умноженной
на скольжение:
![]() .
.
ЭДС, наводимая во
вращающемся роторе, равна ЭДС, наводимой
в неподвижном роторе, умноженной на
скольжение:
![]() .
.
Индуктивное
сопротивление вращающегося ротора
равняется индуктивному сопротивлению
неподвижного ротора, умноженному на
скольжение:
![]() .
.
Модуль тока ротора для этого случая определяется как
![]() .
.
В режиме холостого хода при отсутствии нагрузки на валу токи ротора малы и вращающееся магнитное поле создается токами статора I1x. С ростом нагрузки увеличиваются токи ротора, создающие свое магнитное поле и стремящиеся изменить результирующее поле, а вместе с ним и ЭДС Е1 в фазах статорной обмотки. Небольшое изменение ЭДС Е1 приводит к такому росту фазных токов I1, при которых восстанавливается то же вращающееся магнитное поле, что и при холостом ходе.
Ток статора I1 содержит две составляющие:
- I11 – ток, создающий вращающееся магнитное поле;
- I12 – ток, изменяющийся при нагрузке в соответствии с током ротора.
Ток I12 определяет активную мощность Р1, которая поступает из сети. Ток I12 является активным током, т.е. совпадает по фазе с напряжением U1. Сдвиг по фазе между напряжением U1 и током I1 зависит от нагрузки на валу: чем больше нагрузка, тем больше коэффициент мощности.
Векторная диаграмма фазы обмотки статора представлена на рис.6.
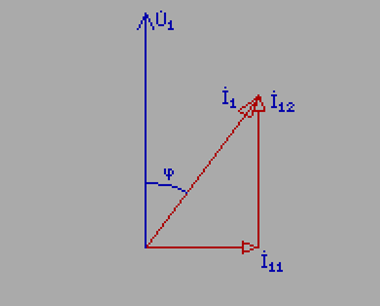
Рис. 6. Векторная диаграмма фазы обмотки статора.