

1.4.1 Приведение силы к точке
Рассмотрим случай переноса силы в произвольную точку,не лежащую на линии действия силы.
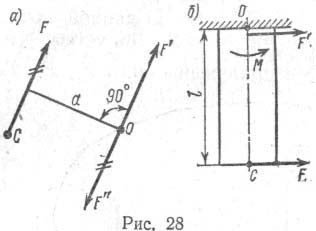
Возьмем силу F, приложенную в точке С. Требуется перенести эту силу параллельно самой себе в некоторую точку О. Приложимв точке О две силы F' и F", противоположно направленные, равные по значению и параллельные заданной силе F, т. е. F' = F" = F. От приложения в точке О этих сил состояние тела не изменяется, так как они взаимно уравновешиваются. Полученную систему трех сил можно рассматривать как состоящую из силы F', приложенной в точке О, и пары сил FF" с моментом М = Fa. Эту пару сил называют присоединенной, а ее плечо а равно плечу силы F относительно точки О.
Таким
образом, при
приведении силы F к точке, не лежащей на
линии действия силы, получается
эквивалентная система, состоящая из
силы, такой же по модулю и направлению,
как и сила F, и присоединенной пары сил,
момент которой равен моменту данной
силы относительно точки приведения: ![]()
В
качестве примера приведения силы
рассмотрим действие силы F на конец С
защемленного стержня (рис.28,б). После
приведения силы F в точку О защемленного
сечения обнаруживаем в нем силу F1 равную
и параллельную заданной, и присоединенный
момент М, равный моменту заданной силы
F относительно точки приведения О, ![]()
1.4.2 Приведение плоской системы сил к данной точке
Описанный метод приведения одной силы к данной точке можно применить к какому угодно числу сил. Допустим, что в точках тела А, В, С и D (рис. 30) приложены силы F1,F2,F3,F4.
Требуется привести эти силы к точке О плоскости. Приведем сначала силу F1 , приложенную в точке А. Приложим в точке О две силы F1' и F1'', параллельные ей и направленные в противоположные стороны. В результате приведения силы F1 получим силу F1' , приложенную в точке О, и пару сил F1' F1'' с плечом a1. Поступив таким же образом с силой F2 , приложенной в точке В, получим силу F2', приложенную в точке О, и пару сил с плечом a2 т. д.
Плоскую
систему сил, приложенных в точках А, В,
С и D, мы заменили сходящимися силами
F1,F2,F3,F4 ,
приложенными в точке О, и парами сил с
моментами, равными моментам заданных
сил относительно точки О:

Сходящиеся
в точке силы можно заменить одной силой
F'гл,
равной геометрической сумме составляющих,

Эту силу, равную геометрической сумме заданных сил, называют главным вектором системы сил и обозначают F'гл .
На
основании правила сложения пар сил их
можно заменить результирующей парой,
момент которой равен алгебраической
сумме моментов заданных сил относительно
точки О и называется главным
моментом относительно
точки приведения
![]()
Следовательно, в общем случае плоская система сил в результате приведения к данной точке О заменяется эквивалентной ей системой, состоящей из одной силы (главного вектора) и одной пары (главного момента).
Необходимо усвоить, что главный вектор F'гл является равнодействующей данной системы сил, так как эта система не эквивалентна одной силе F'гл. Только в частном случае, когда главный момент обращается в нуль, главный вектор будет равнодействующей данной системы сил. Так как главный вектор равен геометрической сумме сил заданной системы, то ни модуль, ни направление его не зависят от выбора центра приведения. Значение и знак главного момента Mгл зависят от положения центра приведения, так как плечи составляющих пар зависят от взаимного положения сил и точки (центра), относительно которой берутся моменты.
Могут
встретиться следующие случаи приведения
системы сил:
1. ![]() —
общий случай; система приводится главному
вектору и к главному моменту.
2.
—
общий случай; система приводится главному
вектору и к главному моменту.
2.![]() ;
система приводится к одной равнодействующей,
равной главному вектору системы.
3.
;
система приводится к одной равнодействующей,
равной главному вектору системы.
3.![]() ;
система приводится к паре сил, момент
которой равен главному моменту.
4.
;
система приводится к паре сил, момент
которой равен главному моменту.
4.![]() ;
система находится в равновесии, т. е. для
равновесия плоской системы сил необходимо
и достаточно, чтобы ее главный вектор
и главный момент одновременно были
равны нулю.
;
система находится в равновесии, т. е. для
равновесия плоской системы сил необходимо
и достаточно, чтобы ее главный вектор
и главный момент одновременно были
равны нулю.
Можно доказать, что в общем случае, когда , всегда есть точка, относительно которой главный момент сил равен нулю.
Рассмотрим
плоскую систему сил, которая приведена
к точке О, т. е. заменена главным вектором ![]() ,
приложенным в точке О, и главным
моментом
,
приложенным в точке О, и главным
моментом ![]() .
Для определенности примем, что главный
момент направлен по часовой стрелке,
т. е.
.
Для определенности примем, что главный
момент направлен по часовой стрелке,
т. е.![]() .
Изобразим этот главный момент парой
сил FF", модуль которых выберем равным
модулю главного вектора , т. е.
.
Изобразим этот главный момент парой
сил FF", модуль которых выберем равным
модулю главного вектора , т. е.![]() .
Одну из сил, составляющих пару, приложим
в центре приведения О, другую силу в
точке С, положение которой определится
из условия:
.
Одну из сил, составляющих пару, приложим
в центре приведения О, другую силу в
точке С, положение которой определится
из условия:![]() .
Следовательно
.
Следовательно ![]() .
.
Расположим
пару сил ![]() так,
чтобы сила F'' была направлена в сторону,
противоположную главному вектору F'гл.
В точке О имеем две равные
взаимнопротивоположные силы F'гл и
F'', направленные по одной прямой; их
можно отбросить (согласно третьей
аксиоме). Следовательно, относительно
точки С главный момент рассматриваемой
системы сил равен нулю, и система
приводится к равнодействующей
так,
чтобы сила F'' была направлена в сторону,
противоположную главному вектору F'гл.
В точке О имеем две равные
взаимнопротивоположные силы F'гл и
F'', направленные по одной прямой; их
можно отбросить (согласно третьей
аксиоме). Следовательно, относительно
точки С главный момент рассматриваемой
системы сил равен нулю, и система
приводится к равнодействующей ![]() .
.