

2.1.2 Установить параметры расчета модели мпт для исследования
Перед выполнением расчетов необходимо предварительно задать параметры расчета модели МПТ. Задание параметров расчета выполняется через меню Configuration Parameters. Для вызова данного окна необходимо на свободной от блоков и их соединений части схемы щелкнуть правой кнопкой мыши и выбрать в появившемся меню (рис.2).
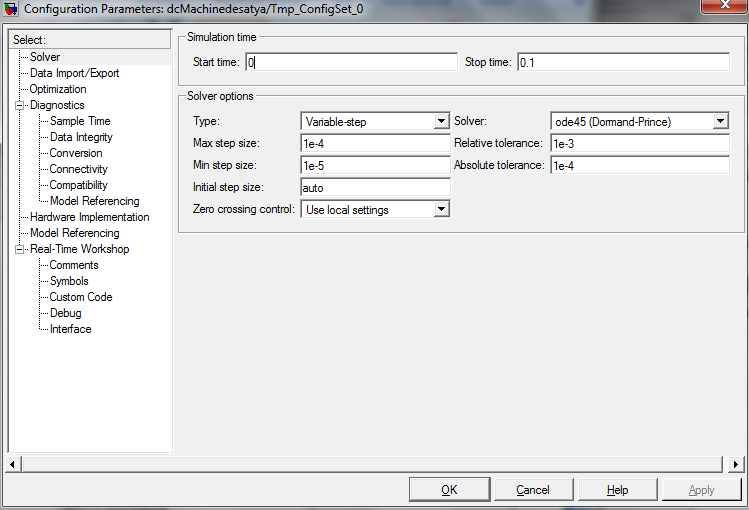
Рисунок 2 - Окно настройки параметров моделирования
Окно настроек параметров имеет несколько вкладок. Изменять параметры нужно только на вкладке Solver (-установка параметров расчета модели), на остальных вкладках изменять параметры не нужно, так как программа MATLAB автоматически задает параметры (Таблица 3).
Таблица 3
Значения параметров моделирования для МПТ
Solver -установка параметров расчета модели |
||
Название вкладки |
Окна данных |
Значение для МПТ |
Simulation time (время расчета) |
|
0 |
|
0.1 |
|
Solver option (параметры расчета) |
|
Variable-step |
|
Ode45 (Dormand-Prince) |
|
|
1e-3 |
|
|
1e-4 |
|
После того, как
собрали схему и задали параметры
необходимо нажать на запуск моделирования
( значок
 на
панели задач окна модели).
на
панели задач окна модели).
В случаи, если схема исследования соединена неверно или параметры блоков введены неправильно, запуск моделирования не произойдет, будет высвечиваться, как ошибка. (Правильный ввод данных параметров и соединение блоков смотрите в методичке указания по ЛБ однофазного трансформатора / Таблица 1 (Ряд действий для создания схемы модели в среде Simulink) ).
2.1.3 Снять показания приборов
Моделирование МПТ с последовательным возбуждением производится по модели (рис. 1), при изменении момента нагрузки (блок Constant) от 5 Hм до 50 Hм с шагом 5 Hм. В случаи, если зависимости характеристик строятся не плавно( некоторые точки совпадают), необходимо уменьшить шаг.
Значения
угловой скорости
 (рад/c),
ток якоря
(рад/c),
ток якоря и ток возбуждения
и ток возбуждения
 «снимаются» с блока <Display>
, (4-рий
рад на <Display>
показывает значения
электромагнитного момента
Te, в данной
ЛБ мы его не учитываем ).
«снимаются» с блока <Display>
, (4-рий
рад на <Display>
показывает значения
электромагнитного момента
Te, в данной
ЛБ мы его не учитываем ).
Показания приборов заносятся в таблицу 4.
Задание |
Измерения |
Расчет |
||||
M(Hм) |
(рад/c) |
|
|
|
|
|
5 |
|
|
|
|
|
|



Таблица 4
Снятие показания приборов
Вычисления производятся по формулам:
 ,
,
 ,
,
