

26
ЛАБОРАТОРНАЯ РАБОТА № 3
Анализ временных рядов (регрессии, классификация) с использованием языков программирования Python и R
Цель работы: изучение основных моделей временных рядов и стационарных временных рядов, расчѐт автокорреляционной и частной автокорреляционной функции временного ряда.
ТЕОРЕТИЧЕСКАЯ ЧАСТЬ
Анализ моделей временных рядов является логическим продолжением базового курса эконометрики пространственных данных. Принципиальное различие в структурах пространственных и временных выборок требует рассмотрения для них отдельных методов и подходов к оцениванию. При построении эконометрических регрессионных моделей для временных рядов возникает ряд особенностей, которые необходимо учесть:
•упорядоченность во времени (хронологический порядок);
•зависимость от прошлого (―память‖, серийная или автокорреляция);
•различаются краткосрочные и долгосрочные зависимости и модели;
•часто встречается феномен ―ложной регрессии‖;
•бывает небольшое число наблюдений (как правило при работе с макроданными), которое невозможно увеличить (т.к. изменяется вид или структура зависимости).
Наиболее распространѐнные модели временных рядов (одномерные и многомерные): 1. стационарные ряды;
2. стационарные относительно тренда или TS-ряды; 3. ряды с единичным корнем или DS-ряды;
4. ряды с переменной волатильностью или с условной гетероскедастичностью. Для каждой модели существуют свои подходы к оцениванию и построению регрессий.
Рассмотрим основные модели стационарных временных рядов:
•модель скользящего среднего MA (Moving Average);
•модель авторегрессии AR (AutoRegression);
•общая смешанная модель ARMA авторегрессии-скользящего среднего.
Модели стационарных рядов Для удобства представления различных моделей часто используется (формальный)
лаговый оператор L:
Далее
Следовательно,
и формально положим 
Модель ARMA Начнѐм сразу с общего вида модели ARMA(p, q)
(1.1)
Замечание. Проинтерпретировать модель можно следующим образом: текущеезначение зависит от прошлых значений до лага p и от текущего и прошлых внешних

27
шоков до лага q. Коэффициенты такой модели в общем случае не имеют экономической интерпретации
Запишем (1.1) используя лаговый оператор L:
Перепишем в виде
Теперь введѐм два многочлена степени p и q:
Тогда модель (1.1) формально можно записать
Определение. Многочлен φ(z) называется авторегрессионным многочленом.
Определение.  называется авторегрессионной частью модели ARMA, а
называется авторегрессионной частью модели ARMA, а  – частью скользящего среднего.
– частью скользящего среднего.
Утверждение. Модель ARMA определяет стационарный ряд выполнено условие стационарности: все корни (в том числе из C) авторегрессионного многочлена
по модулю больше единицы. Ссылка:
https://drive.google.com/file/d/1yH4QKhV2iJPdF2fnbSJK9ovgKD6U9Y85/view?usp=shari
ng
ПРАКТИЧЕСКАЯ ЧАСТЬ Задание на лабораторную работу
1.Произвести расчѐт автокорреляционной и частной автокорреляционной функции временного ряда
2.Определить степень стационарности временного ряда с помощью критериев ДикиФуллера
3.Применить модель ARIMA для прогнозирования значений временного ряда наодин период
28
ЛАБОРАТОРНАЯ РАБОТА № 4
Применение нейронных сетей для анализа временных рядов с использованием языков программирования Python и R
Цель работы – ознакомиться с мультиплексированием с ортогональным частотным разделением каналов (OFDM) и принципами его работы и смоделировать систему передачи и приема сигналов с модуляцией OFDM в GNU Radio.
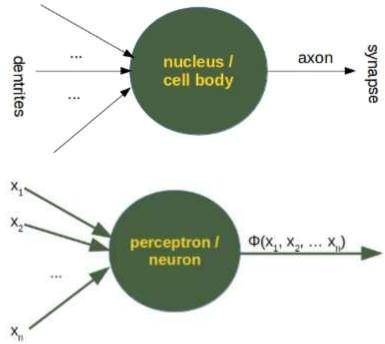
Когда идет речь о «нейронных сетях», мы имеем в виду искусственные нейронные сети (ИНС). Идея ИНС основана на биологических нейронных сетях, подобных мозгу живого существа. Базовой структурой нейронной сети, как искусственной, так и живой, является нейрон. Нейрон в биологии состоит из трех основных частей: сомы (тела клетки),дендритов и аксона.
Дендриты отходят от сомы древовидно и с каждой ветвью становятся тоньше. Они получают сигналы (импульсы) от других нейронов в синапсах. Аксон — всегда только один
— также выходит из сомы и обычно простирается на большее расстояние, чемдентриты. Аксон используется для отправки выходного сигнала нейрона к другим нейронам или, лучше, к синапсам других нейронов.
Абстракция биологического нейрона и искусственного нейрона Несмотря на то, что приведенное выше изображение уже является абстракцией для
биолога, мы можем еще больше абстрагироваться:
Персептрон искусственных нейронных сетей имитирует биологический нейрон.
Входные сигналы умножаются на значения веса, т.е. каждый вход имеет соответствующий вес. Таким образом, ввод можно настроить индивидуально для каждого xi. Мы можем видеть все входные данные как входной вектор и соответствующие веса как вектор весов.
Когда поступает сигнал, он умножается на значение веса, назначенное этому конкретному входу. То есть, если нейрон имеет три входа, то он имеет три веса, которые можно настроить индивидуально. Веса обычно корректируются на этапе обучения.
После этого модифицированные входные сигналы суммируются. К этой сумме также можно добавить так называемое смещение 'b'. Смещение — это значение, которое также можно отрегулировать на этапе обучения.

29
Наконец, необходимо определить фактическую производительность. Для этого к взвешенной сумме входных значений применяется активационная или ступенчатая функция
Φ.
Простейшей формой функции активации является бинарная функция. Если результат суммирования больше некоторого порога s, результатом Φ будет 1, иначе 0.
Источник: https://python-course.eu/machine-learning/neural-networks-introduction.php
ПРАКТИЧЕСКАЯ ЧАСТЬ Задание на лабораторную работу
1.Используя метод MLPRegression библиотеки Sklearn произвести прогнозирование значений временного ряда на один период, оценить точность модели по метрике коэффициента детерминации и среднеквадратической ошибки. (https://scikitlearn.org/stable/modules/generated/sklearn.neural_network.MLPRegressor.html#sklearn.neural_ network.MLPRegressor)
2.Произвести исследование влияния гиперпараметров модели MLPRegression на точность прогнозирования, для этого выбрать один из гиперпараметров модели и получить зависимость изменения значений данного гиперпараметра от конечной точностипрогнозной модели