

7591
.pdf40
Так как 1 5# , то #A YZ[ YL[O 8E. При этом 0A 60#A 60 ∙ 8 480 м.
3. Определяем скорость и ускорение груза в момент падения.
Определяем проекции вектора скорости на координатные оси:
'2 0, 60, '3 1, 10#.
Определяем проекции вектора ускорения на координатные оси:
2 '2, 06 0,3 '3, 16 10.
Вычисляем модуль вектора скорости:
' '2 '3 60 "10#$ 10√6 # .
При # #A 8E значение скорости будет равно ' 10√6 8 100 мс.
Найдем модуль ускорения: 2 3 √0 10 10 см..
4. Вычисляем нормальное и касательное ускорения точки, а также радиус кривизны траектории:
)- |
+ |
|
|
|
|
AO+ |
|
|
|
|
|
|
|||||||||
| 9| R)+R R10 |
|
|
R R |
|
|
|
R, |
|
|
|
|
|
|
||||||||
√LVT+. |
√LVT+. |
|
|
|
|
|
|
||||||||||||||
< 9 Y |
100 LVT+AOO+.. |
|
|
VO |
. |
|
|
|
|
|
|
||||||||||
√LVT+. |
? IJ |
L |
"36 # |
|
$ |
.\, |
|||||||||||||||
5. Определяем радиус кривизны траектории : |
-. |
[ |
|
|
|||||||||||||||||
откуда получаем радиус кривизны в момент падения при #A 8E: |
|
|
|||||||||||||||||||
-. |
[ |
|
|
|
$ |
.\ |
1666,7м. |
|
|
|
|
|
|
||||||||
? IJ |
L "36 8 |
|
|
|
|
|
|
|
|
||||||||||||
Ответ: 0A |
480 м, ' 100 мс , 10 |
м |
, ? 1666,7м. |
|
|
|
|
|
|||||||||||||
с. |
|
|
|
|
|
||||||||||||||||
Задача 2.6. Естественный способ задания движения точки
Материальная точка М движется по окружности, которая имеет
радиус R=2м. |
В начальный момент времени точка находится в |
||
положении О (начало отсчета дуговой координаты). |
Задан закон |
||
движения материальной точки М в естественной форме |
^ 2_# `K # . |
||
Положительное направление отсчета принято по часовой стрелке. |
|||
В момент времени |
t=2с найти: положение точки М |
(точку М1); |
|
вектор скорости |
'!; |
векторы полных, касательных и нормальных |
|
ускорений: !, !9, !<. |
|
|
|

41
Определить является движение в данный момент времени ускоренным или замедленным.
Решение 1. Покажем положение точки М на траектории в произвольный
момент времени t (рис.2.6).
Покажем на рисунке угол , который соответствует дуговой координате s.
|
|
R |
|
|
|
τ − единичныйвектор, |
|
R |
|
направленный в положительном |
|
|
|
||
− |
|
направлении дуговой координаты |
|
C |
O |
О − начало отсчета |
|
|
R |
дуговой координаты |
|
α |
τ |
||
|
|||
+ |
|
|
|
M |
|
S − дуговая |
|
|
|
||
R |
|
координата |
|
τ |
|
|
Рис.2.6
2. Определяем положение точки М при t=2c (точку М1).
Из геометрии известно соотношение между центральным углом окружности и длиной соответствующей дуги: ^ N .
Определим дуговую координату для момента времени t=2c.
8|+H M 2_ ∙ 2 `K ∙ 2 4_ _ 3_.
Это значение дуговой координаты соответствует центральному углу
N cb L` 270O.
Показываем точку М1 на рисунке.

|
|
|
|
|
42 |
|
|
R |
|
|
R |
R |
|
||
aτ |
M1 τ |
v |
|
||||
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
aτ ×vτ < 0 - движение |
R |
|
|
R |
|
|
||
|
|
|
|||||
|
|
an |
|
|
|
||
a |
|
|
− |
замедленное |
|||
|
|
|
|
|
|
||
3π |
|
|
C |
|
|
O |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
Рис.2.7
3. Определяем скорость точки.
Определяем проекцию скорости на единичный вектор касательной: |
|||||
'9 |
, |
` |
|
, |
|
8, 2_ # |
|
|
|||
|
|
|
|
|
м. |
|
|
, ` |
∙ 2 _ 3.14 |
||
'9|+H M 2_ |
с |
||||
'9 d e, следовательно, вектор скорости направлен в сторону положительного отсчета дуговой координаты (вправо). Модуль скорости имеет то же значение, поскольку ' |'9|.
4. Определяем ускорение точки.
Определяем проекцию ускорения на единичный вектор касательной:
9 86 , ` 1.57 м .
M.
Определяем проекцию ускорения на единичный вектор нормали:
< ->. L.AK. 4.93 см..
Определяем модуль ускорения (полное ускорение): |
|||||
9 < √1.57 4.93 5.17 |
м |
. |
|
||
с. |
|
||||
5. Определяем характер движения. |
|
|
|
|
|
Проекции '9 и |
9 имеют разные знаки. |
!9 направлены в разные |
|||
Это говорит о том, что вектора |
'! |
|
и |
||
стороны. |
|
|
|
|
|
Таким образом, |
движение точки в заданный момент времени t=2c |
||||
является замедленным.
Ответ: ' 3.14 мс , 9 1.57 Mм. , < 4.93 см., 5.17 см.
43
2.2 Движение твердого тела
Простейшими видами движения твердого тела являются поступательное и вращательное движения.
Поступательным движением называется движение, при котором любой отрезок, принадлежащий телу, перемещается, оставаясь параллельным своему первоначальному направлению. Поступательное движение твердого тела полностью определяется движением какой-либо его точки, например центра тяжести.
Вращательным движением называется движение тела, при котором все точки тела, лежащие на некоторой прямой, остаются неподвижными.
Угловой скоростью называется лежащий на оси вращения вектор f!( ,
проекция которого на эту ось равна производной по времени от угла |
||||
поворота: |
fg h,. |
|
f |fg| |h,|, а его размерность |
|
Модуль угловой скорости равен |
||||
ifj |
радс сno. |
|
|
|
При |
pq d 0 угол поворота r увеличивается, а при pq s 0 уменьшается. |
|||
Угловым ускорением называется величина t(!, равная производной по |
||||
времени от угловой скорости: |
t(! f!( , |
|||
При этом проекция вектора углового ускорения на ось z будет равна: |
||||
uq p, r6 |
|
|
||
|
q |
. |
|
u |uq| |r6|, а его размерность |
|
|
|
||
Модуль |
углового ускорения |
равен |
||
iuj радM. сn . При pq ∙ uq d 0 вращение является ускоренным (направления |
||||
векторов совпадают), а при pq ∙ uq s 0 – |
замедленным (направления векторов |
|||
противоположны).
Скорость точки вращающегося тела определяется по формуле Эйлера:
' p .
Полное ускорение точки вращающегося тела является векторной
суммой касательного и нормального ускорений: v(! v(!w v(!x,
где vw t y - касательное ускорение, которое при рассмотрении твердого тела называют вращательным ускорением,
< p R - нормальное ускорение, которое при рассмотрении твердого тела называют центростремительным или осестремительным ускорением.
44
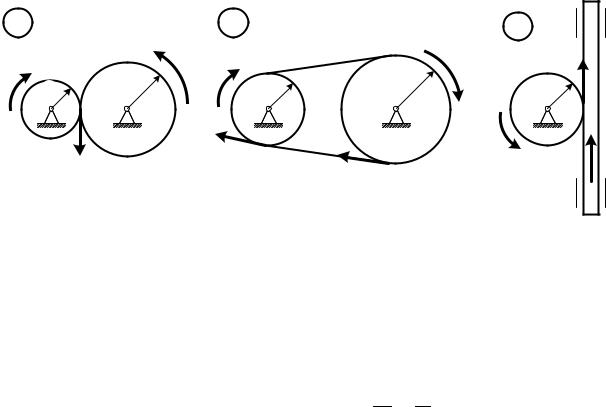
2.3Преобразование вращательного движения
Вдвижущихся элементах машин часто происходят преобразования движений:
∙преобразование одного вращательного движения в другое,
∙преобразование вращательного движения в поступательное (и наоборот).
Преобразования эти происходят с помощью
∙зубчатых или фрикционных передач,
∙ременных или цепных передач.
ω |
ω2 |
ω1 |
|
|
ω2 |
v |
1 |
|
|
|
R2 |
|
|
R |
R |
R1 |
|
|
R |
|
2 |
|
|
|
|||
1 |
|
|
|
|
|
|
|
v |
v |
v |
|
ω |
v |
|
|
|
|
Рис.2.8
Связи между скоростями двух различных движений устанавливаются из условия отсутствия проскальзывания между взаимодействующими телами, то есть из условия равенства скоростей двух тел в точке их соприкосновения.
Так, справедливым является соотношение pA A p или
которое получено из условия, что в точке соприкосновения 'A ' (скорость точки первого тела равна скорости точки второго тела).
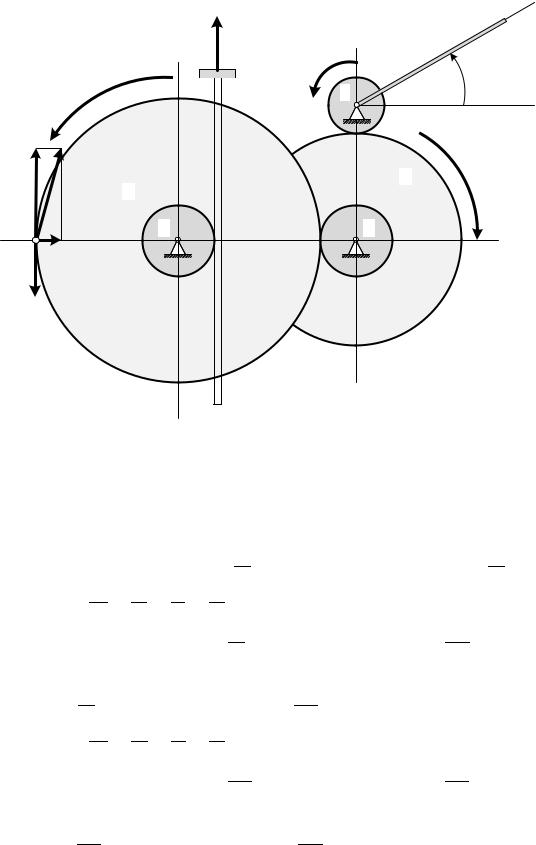
Задача 2.7. Преобразование движений твердого тела
В механизме домкрата рукоятка А отклоняется на угол r, который изменяется в пределах от -300 до +300 по закону r `V 8C4 |`+L }. Рукоятка
А жестко соединена с шестерней 1, то есть rA r. Шестерни 2, 3, 4, 5, вращаясь, толкают зубчатую рейку В, для которой движение вниз запрещено.
45
Определить скорости и ускорения деталей 1, 2, 3, 4, 5 и В, если |
|||
известно, |
что [ 16 см, а количество зубьев на шестеренках равно: |
||
~A 6, ~ |
24, ~L 8, ~K 32. При |
t=1c |
определить скорость и |
ускорение рейки В и точки М, если известно, что K 48 см.
|
|
vB |
ω > 0 |
ω4 |
= ω5 |
> 0 |
1 |
|
|||
|
|
B |
1 |
R |
R |
|
|
aM |
2 |
||
aMτ |
|||
|
4 |
|
|
M |
5 |
3 |
|
|
R |
|
|
|
an |
|
|
|
M |
|
|
R |
|
|
|
vM |
|
|
ϕ > 0
ω2 = ω3 < 0
Рис.2.9
Решение:
Определяем скорости и ускорения элементов механизма, принимая положительное направление поворота против часовой стрелки.
Рукоятка А жестко соединена с шестерней 1, поэтому
|
` |
`+ |
, |
|
|
|
|
`. |
`+ |
u |
|
|
|
|
|
`\ |
`+ |
}. |
||
r r V 8C4 |
| L |
} |
p r, A• EF8 | L }, |
|
|
p, r6 [K 8C4 |
| L |
|||||||||||||
A |
|
|
|
|
|
A |
|
A |
|
|
A |
|
|
A A |
|
|
|
|
||
Из условия |
zz.{ cc{. qq{. VK 4 |
найдем, |
|
что |
|
p KA pA, откуда |
||||||||||||||
следует, что |
p |
|
K p |
W EF8 |
| L }, |
u |
|
|
p, AV 8C4 |
| L }. |
|
|||||||||
|
|
|
|
A |
A |
|
`. |
`+ |
|
|
|
|
`\ |
`+ |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Шестерни 2 и 3 связаны жестко, поэтому |
|
|
|
`+ |
|
|
|
|
|
|
||||||||||
|
`. |
|
|
`+ |
}, |
|
|
|
`\ |
|
|
|
|
|
|
|
|
|
||
pL p W EF8 | L |
|
uL u AV 8C4 | L }. |
|
pK KA pL, откуда |
||||||||||||||||
Из условия |
zz€\ cc\€ |
qq\€ L• 4 |
найдем, |
|
что |
|
||||||||||||||
следует, что |
p |
|
K pL |
•• EF8 | L }, |
u |
|
|
p, •VK 8C4 |
| L }. |
|
||||||||||
K |
|
|
A |
|
|
`. |
`+ |
K |
|
K |
|
`\ |
`+ |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Шестерни 4 и 5 связаны жестко, поэтому |
|
|
|
`+ |
|
|
|
|
|
|
||||||||||
|
`. |
|
|
`+ |
|
|
|
`\ |
8C4 |
|
|
|
|
|
|
|
|
|||
p[ pK •• EF8 |
| L }, |
|
u[ uK •VK |
| L }. |
|
|
|
|
|
|
||||||||||

46
Скорость рейки В при p[ s e будет равна нулю (движение вниз |
||||||||||||||||||||||||||||||||||
отсутствует), а при p[ d e находится из условия |
'• p[ [: |
|||||||||||||||||||||||||||||||||
|
|
|
`. |
|
|
|
`+ |
|
|
|
|
|
|
|
`. |
|
`+ |
|
|
|
|
|
|
|||||||||||
'• p[ [ |
|
|
|
|
EF8 |
| L } ∙ 16 |
|
|
EF8 | L |
}. |
|
|
|
|
||||||||||||||||||||
•• |
A• |
|
|
|
|
|||||||||||||||||||||||||||||
При этом ускорение рейки В будет равно |
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
`\ |
|
|
|
`+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
', |
|
|
|
|
8C4 | L }. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
[K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
• |
• |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При t=1c определяем скорость и ускорение рейки В. |
||||||||||||||||||||||||||||||||||
|
_ |
|
|
|
|
|
|
|
_ |
_ |
1 |
0.274 |
м |
|
|
|
|
|
|
|||||||||||||||
'•|+HA 18 EF8 |3} 18 |
∙ 2 |
с. |
|
|
|
|
||||||||||||||||||||||||||||
•|+HA |
`\ |
|
|
|
|
|
|
|
` |
`\ |
|
√L |
|
|
м |
|
|
|
|
|||||||||||||||
|
8C4 |
|L} |
|
|
|
|
∙ |
|
|
|
|
0.497 |
|
. |
|
|
|
|||||||||||||||||
[K |
[K |
|
|
с. |
|
|||||||||||||||||||||||||||||
При t=1c определяем скорость и ускорение шестерни №4. |
||||||||||||||||||||||||||||||||||
pK|+HA |
`. |
|
|
|
|
|
` |
`. |
|
|
|
|
|
A |
|
рад |
|
|||||||||||||||||
|
|
EF8 |
|L |
} |
|
|
|
|
∙ 0.017 |
|
с |
, |
|
|
|
|||||||||||||||||||
•• |
•• |
|
|
|||||||||||||||||||||||||||||||
uK|+HA |
`\ |
|
|
|
|
|
` |
`\ |
|
|
|
|
√L |
|
|
|
рад |
|
||||||||||||||||
|
8C4 |
|L} |
|
∙ |
|
0.031 |
с. . |
|
||||||||||||||||||||||||||
•VK |
•VK |
|
|
|||||||||||||||||||||||||||||||
При t=1c |
определяем скорость и проекции ускорения точки М по |
|||||||||||||||||||||||||||||||||
формулам: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Eм |
|
|
|
|
|
|
|
|||||||
'М9 pK K 0.017 ∙ 48 0.816 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
с , |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
М9 |
uK K 0.031 ∙ 48 1.488 смс. , |
|
|
|
|
|
|
|
||||||||||||||||||||||||||
М< pK K 0.017 ∙ 48 0.0139 смс. . |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
При этом модуль ускорения точки М будет равен: |
||||||||||||||||||||||||||||||||||
|
|
|
K uK pKK 48√0.031 0.017K 1,488 смс. . |
|||||||||||||||||||||||||||||||
ƒ Y" М9 |
$ " М< $ |
|||||||||||||||||||||||||||||||||
Ответ: |
'•|+HA 0.274 мс, •|+HA 0.497 |
м |
, |
'М 0.816 Mмс , ƒ |
||||||||||||||||||||||||||||||
с. |
||||||||||||||||||||||||||||||||||
1,488 смс. . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Задача 2.8. Преобразование движений твердого тела
Два шкива соединены ременной передачей. Точка А одного из шкивов имеет скорость ' 20 см⁄с. Определить скорость точки В другого шкива.
R
v A
A |
C |
D |
|
|
r |
r |
|
2r |
B |
||
|
|||
|
|
r / 2 |
47
Рис.2.10
Решение: |
|
Зная скорость точки А можно найти угловую скорость левого шкива: |
|
|
pлев ' ⁄2 . |
Умножив эту угловую скорость на расстояние до точки С, найдем ее |
|
скорость, которая в свою очередь будет равна скорости точки D: |
|
|
'„ pлев ∙ ' ∙ ⁄2 ' ⁄2 '…. |
Поделив скорость точки D на расстояние до оси вращения, получим |
|
угловую скорость правого шкива: pправ '…⁄ ' ⁄2 . |
|
Скорость точки В получим, умножая угловую скорость pправ на расстояние |
|
⁄2: '• |
pправ ∙ " ⁄2$ ' ∙ " ⁄2$⁄2 ' ⁄4 20⁄4 5" мсnA$. |
Ответ: |
'• 5 мсnA. |
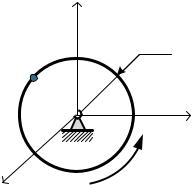
Задача 2.9. Вращательное движение твердого тела Диск радиуса R=10 см вращается вокруг оси Ох
по закону r 2 #L, где r ─ угол поворота тела в радианах (рис.2.11).
Найти величину нормального ускорения точки A А в момент времени t=2c.
x
z |
|
|
R |
O |
y |
|
|
|
ϕ (t ) |
Решение: |
Рис.2.11 |
Дифференцируя по времени закон вращательного движения, получим
угловую скорость диска, а затем и угловое ускорение вращающегося тела: p† r, 3#.
Подставляя в полученное выражения значение времени, получим, что при |
|
t=2 c угловая скорость будет равна:p† 3 ∙ 2 12 "сnA$. |
|
Теперь нормальное ускорение точки А, лежащей на краю диска, можно |
|
найти по формуле: |
< p 12 ∙ 10 1440 "см ∙ сn $. |
Ответ: < 1440 |
"см ∙ сn $ |
Задача 2.10. Вращательное движение твердого тела
Тело равномерно вращается вокруг оси z с угловой скоростью p 6 сnA. На какой угол повернется тело за время t =2 с?
Решение:

48
По условию задачи вращение тела является равномерным. Поэтому, угол, на
который тело повернется за некоторый промежуток времени, следует искать по формуле: r p# 6 ∙ 2 12 "рад$.
Ответ: r 12 рад.
2.4 Плоскопараллельное движение твердого тела
Плоскопараллельным или плоским движением называется движение твердого тела, при котором его точки перемещаются в плоскостях, параллельных некоторой неподвижной плоскости.
Скорость точки плоской фигуры равна векторной сумме скорости полюса и скорости, которую эта точка имеет в относительном вращении этой фигуры вокруг полюса: '!ƒ '!„ '!ƒ„.
Если выбрать в качестве полюса МЦС, то скорость произвольной точки М будет равна: '!ƒ '!‡ '!ƒ‡ '!ƒР.
Мгновенным центром скоростей (МЦС) называется точка Р плоской фигуры, скорость которой в данный момент времени равна нулю: '‡ 0. Такая точка всегда существует.
Скорость произвольной точки М плоской фигуры равняется скорости, которую она имеет в относительном вращении вокруг МЦС.
Ускорение точки плоской фигуры равно векторной сумме ускорения полюса и ускорения, которое имеет эта точка в относительном вращении
фигуры вокруг полюса:
!ƒ !„ !ƒ„ !„ !ƒ9 „ !ƒ< „.
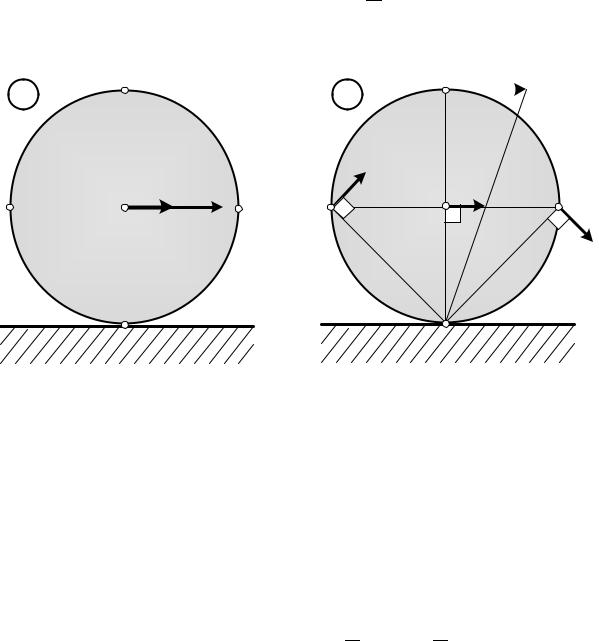
Задача 2.11. Плоскопараллельное движение твердого тела
Пусть колесо радиусом R=1м катится без скольжения по горизонтальной плоскости. Скорость центра колеса 'O 1 мс , а ускорение центра колеса по направлению совпадает со скоростью и равно O 1 см..
Определить скорости и ускорения точек А, В, С, Р, расположенных на ободе колеса.
Решение:
1. Определение скоростей МЦС колеса – точка Р. Относительно точки Р колесо вращается по
часовой стрелке. Соединим точку Р с точками А, В, С и покажем
49
направления скоростей в сторону вращения по перпендикуляру к
отрезкам АР, ВР, СР. |
формулы, |
|
|
|||
Угловую скорость колеса получим из |
которая связывает |
|||||
угловую скорость со скоростью центра колеса: |
'O |
p ∙ , из которой |
||||
получается, что p |
-ˆ |
1 AM. |
|
|
|
|
c |
|
|
|
|
||
Модули скоростей получим по формуле Эйлера 'ƒ„ p ƒ„: |
м |
|||||
|
м |
м |
'„ p ∙ √2 √2 |
|||
' p ∙ √2 √2 с ; '• p ∙ 2 2 |
с ; |
с. |
||||
2. Определение ускорений Расстояние от точки О до МЦС (точки Р) всегда постоянно. Кроме
того точка О движется прямолинейно. В этом случае угловое ускорение |
|||||||||||
можно найти следующим образом: |
u p, ) |
|-Š |
} -,Š IŠ. |
||||||||
|
)+ |
|
‹‡ |
|
c |
c |
|||||
То есть в данный момент времени: |
u |
IŠ |
|
Aсм. |
1 радс . |
|
|
||||
c |
Aм |
R |
|||||||||
B |
|
|
|
|
|
|
B |
vB |
|||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
vA |
|
R |
|
A |
O |
C |
A |
O |
vO |
C |
|
|
|
||||
|
R |
|
|
|
||
|
R |
|
|
|
|
|
|
aO |
vO |
|
|
|
|
R vC
P P
Рис.2.12
Выберем в качестве полюса центр колеса (точку О) и используем для определения ускорения произвольной точки М теорему о сложении
ускорений:
!ƒ !‹ !ƒ‹ !‹ !ƒ9 ‹ !ƒ< ‹.
Вращательные ускорения точек A, B, C, P во вращении колеса относительно полюса О по модулю будут одинаковы и направлены перпендикулярно к соответствующему радиусу в сторону углового ускорения:
‡‹9 9‹ •‹9 „‹9 u ∙ 1 MA. ∙ 1м 1 Mм..