

MATLAB для дискретных САУ
.pdfМ И Н И СТ Е РСТ В О О БРА ЗО В А Н И Я И Н А У К И РО ССИ Й СК О Й Ф Е Д Е РА Ц И И
В О РО Н Е Ж СК И Й ГО СУ Д А РСТ В Е Н Н Ы Й У Н И В Е РСИ Т Е Т
MATLAB д л я д искр етн ы х систем упр авл ен ия
У чебно-метод и ческоепособи епо специ альности «При клад наяматемати ка и и нформати ка» 010200
Воронеж
2005
2
У тв ерж д ено научно-метод и чески м сов етом протокол№ 1 от22 сентября2005 г. факультета ПМ М
Состав и тель К ры ж анов скаяЮ .А .
У чебно-метод и ческое пособи е |
под готов лено на |
кафед ре |
техни ческой |
|
ки бернети ки |
и ав томати ческого регули ров ани я |
факультета |
при клад ной |
|
математи ки , |
и нформати ки и |
механи ки В оронеж ского госуд арств енного |
||
уни в ерси тета.
Рекоменд уетсяд лястуд ентов 4 курса д /о факультета При клад ной математи ки , и нформати ки и механи ки .
3
Д анное учебно-метод и ческое пособи е сод ерж и т св ед ени я по и спользов ани ю
си стемы MATLAB д ля мод ели ров ани я д и скретны х |
си стем ав томати ческого |
|||||||||||||
управ лени я. М |
атери ал |
основ ы в ается на |
MATLAB |
в ерси и |
|
6.5. Пособи е |
||||||||
разд елено на несколько частей , |
посв ящ енны х в озмож ностям преобразов ани я |
|||||||||||||
непреры в ны х |
си стем в |
д и скретную |
форму, |
и сслед ов ани ю |
|
устой чи в ости , |
||||||||
получени ю |
частотной |
характери сти ки , |
и спользов ани ю |
в озмож ностей |
д ля |
|||||||||
мод ели ров ани я Simulink. К роме того, |
при в од ятся при меры |
и |
зад ани я д ля |
|||||||||||
и нд и в и д уального |
в ы полнени я. |
М атери алы |
опробов аны |
при |
пров ед ени и |
|||||||||
лабораторны х заняти й . Пособи е пред назначено студ ентам 4 |
курса д нев ного |
|||||||||||||
отд елени я, |
и зучаю щ и м |
спецкурс «Д и скретны е си стемы |
управ лени я» |
и |
||||||||||
д и сци пли ну |
|
«Т еори я |
ав томати ческого |
управ лени я» , |
и |
|
мож ет |
бы ть |
||||||
и спользов ано д алеепри |
и зучени и д и сци пли н специ али заци и . |
При |
под готов ке |
|||||||||||
матери алов |
бы ли |
и спользов аны |
ли тературны е и Internet-и сточни ки |
[1-5]. При |
||||||||||
и зучени и матери алов рекоменд уетсяи спользов ать и сточни ки [6-8]. Д ляначала работы требуется в лад ени е матери алом в рамках курса «Т еори я ав томати ческого управлени я» .
С од ер ж ан ие
Введ ен ие … |
… … |
… |
… |
… |
… |
… |
… |
… |
|
… … … … … |
… |
|
… |
… |
… |
|
… |
… |
… |
… |
… |
… |
… |
… |
… |
..3 |
||||
П р еобр азован ие н епр ер ы вн ы х |
систем в д искр етн ы е … |
… |
… |
… |
… |
… |
… |
… |
… |
4 |
||||||||||||||||||||
И спользов ани еc2d … |
… |
… |
… |
… |
… |
|
… |
… |
… |
… |
… |
… |
|
… |
… |
… |
|
..… |
… |
… |
… |
… |
… |
… |
… |
… |
4 |
|||
И спользов ани еc2dm … |
… |
… |
… |
… |
… … … … … … … … … … … ..… |
… |
… |
… |
… |
… |
… |
8 |
||||||||||||||||||
Устойчивостьи пер ех од н ая х ар актер истика … |
… |
… |
..… |
… |
… |
… |
… |
… |
… |
… |
..10 |
|||||||||||||||||||
Discrete Root-Locus … |
… |
… … |
… |
… |
… |
|
… |
… |
… |
… |
… |
… |
|
… |
..… |
… |
… |
… |
… |
… |
… |
… |
… |
12 |
||||||
Ltiview ..… … … … … … … … … … |
… |
… |
|
… |
… |
… |
… |
… |
… |
|
..… |
|
… |
… |
… |
… |
… |
… |
… |
… |
… |
13 |
||||||||
Частотн ая х ар актер истика … |
… |
|
… |
… |
… |
… |
… |
… |
|
… |
..… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
..14 |
|||||||||
Simulink … |
… … |
… |
… |
… |
… |
… |
… |
… |
… |
… |
|
… |
… |
… |
… |
… |
..… |
… |
|
… |
… |
… |
… |
… |
… |
… |
… |
… |
14 |
|
Блоки Discrete … |
… |
… |
… |
… |
… |
… |
… |
|
… |
… |
… |
… |
… |
… |
|
… |
… |
… |
|
… |
… |
… |
… |
… |
… |
… |
.… |
...17 |
||
М етод ци фров ого переоборуд ов ани янепреры в ного регулятора в сред е |
|
|
||||||||||||||||||||||||||||
MATLAB/SIMULINK … |
… |
… |
… |
… |
… |
… |
… |
|
… |
… |
… |
… |
… |
… |
|
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
..20 |
||||
Зад ан ия … |
… |
… |
.… |
… |
… |
… |
… |
… |
… |
|
… |
… |
… |
… |
… |
|
… |
… |
… |
… |
… |
… |
… |
… |
… |
|
.25 |
|||
Литер атур а … |
… |
… |
… |
… |
… |
… |
… |
.… |
… |
… |
… |
… |
… |
|
… |
… |
… |
|
… |
… |
… |
… |
… |
… |
… |
… |
… |
26 |
||
Введ ен ие |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Сов ременны е программы |
чи сленного мод ели ров ани я си стем |
и |
процессов |
|||||||||||||||||||||||||||
станов ятся в се более ав томати зи ров анны ми , |
облегчая пользов ателю |
процесс |
||||||||||||||||||||||||||||
постанов ки и реш ени яш и рокого класса слож ны х зад ач. Е щ ебольш и й э ффект
д аю т в озмож ности |
качеств енного в и зуального |
пред став лени я результатов . |
||
Сред и таки х программ, безуслов но, од но |
и з |
ли д и рую щ и х |
мест зани мает |
|
си стема Matlab+Simulink, на основ екоторой |
разработано больш оеколи честв о |
|||
професси ональны х |
при лож ени й д ля конкретны х областей |
при менени я. В |
||

|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
д анном пособи и |
буд ут рассмотрены |
в озмож ности |
мод ели ров ани я д и скретны х |
||||||||||
си стем управ лени яспомощ ью си стемы Matlab+Simulink. |
|
|
|
||||||||||
Т еори я д и скретны х си стем яв ляется од ни м и з в аж ны х направ лени й |
разв и ти я |
||||||||||||
теори и |
и |
практи ки |
ав томати ческого управ лени я. |
Практи чески ни |
од на и з |
||||||||
сов ременны х си стем управ лени я летательны ми |
аппаратами , |
косми чески ми |
|||||||||||
объектами , |
суд ами , |
технологи чески ми |
процессами , роботами |
и |
т.д . не |
||||||||
обход и тся без |
и спользов ани я в |
контуре управ лени я бортов ы х |
ци фров ы х |
||||||||||
в ы чи сли тельны х |
маш и н, что д елает э ти |
си стемы |
д и скретны ми |
и |
требует |
||||||||
особого |
под ход а |
к анали зу |
и |
си нтезу |
под обны х си стем. |
|
Си стему |
||||||
ав томати ческого управ лени я буд ем назы в ать |
д и скретной , |
если |
|
в ы ход ная |
|||||||||
в ели чи на какого-ли бо ееэ лементаи меетд и скретны й характер. |
|
|
|
||||||||||
П р еобр азован ие н епр ер ы вн ы х |
систем в д искр етн ы е |
|
|
|
|||||||||
Испол ьзован ие c2d
В Matlab сущ еств ует функци я c2d, отв ечаю щ ая за преобразов ани е зад анной
непреры в ной |
си стемы |
в д и скретную си стему. В качеств емод елей могутбы ть |
||
указаны |
TF, |
SS, и ли |
ZPK-мод ели . Ф ункци я d2c |
осущ еств ляет обратное |
преобразов ани е. К оманд а под д ерж и в ает несколько |
метод ов д и скрети заци и , |
|||
в клю чая |
э кстраполятор нулев ого поряд ка (ZOH), |
э кстраполятор перв ого |
||
поряд ка (FOH), при бли ж ени е Т асти на, а такж е при бли ж ени е с соотв етств и ем
нулей и полю сов . |
|
|
Си нтакси с |
|
|
· |
Sysd = c2d (sysc, Ts); |
% Ts = пери од в ы борки |
·Sysc = d2c (sysd);
В таком в и д екоманд а в ы полняетZOH преобразов ани епо умолчани ю . Ч тобы и спользов ать альтернати в ны е конв ерси онны е схемы , след ует опред ели ть ж елаелмы й метод какд ополни тельны й параметр:
·Sysd = c2d (sysc, Ts, 'foh'); % э кстраполяторперв ого поряд ка
· |
Sysc = d2c (sysd, 'tustin'); % при бли ж ени еТ асти на |
|
|
Э кст ра по л я т о рнул ево го по ря дка |
|
||
Д и скрети заци ясэ кстраполятором нулев ого поряд ка |
непреры в ной LTI - |
||
мод ели |
И зображ ена на след ую щ ей блок-схеме. |
|
|
ZOH-устрой ств о генери рует непреры в ны й в ход ной си гнал u(t), под д ерж и в ая каж д ую в ели чи ну u [k] постоянной в течени еод ного пери од а:
|
|
|
5 |
|
Си гнал |
под аетсянепреры в ной си стеме |
, получаю щ и й сяв ы ход |
||
отби раетсякаж д ы е секунд , д ляполучени я |
. |
|||
Н аоборот, |
д ля д анной |
д и скретной |
си стемы |
, преобразов ани е d2c |
построи т непреры в ную |
си стему |
, чья ZOH-д и скрети заци я сов пад ает с |
||
 . Э то обратноед ей ств и еи меетслед ую щ и еограни чени я:
. Э то обратноед ей ств и еи меетслед ую щ и еограни чени я:
·d2c немож етработать сLTI-мод елями сполю сами в  ;
;
·отри цательны ев ещ еств енны еполю са в области  отображ аю тсяпарой
отображ аю тсяпарой
комплексны х полю сов в области |
. |
В результате преобразов ани е d2c |
д и скретной си стемы с отри цательны ми |
в ещ еств енны ми полю сами построи т |
|
непреры в ную си стему сболеев ы соки м поряд ком.
След ую щ и й при мери ллю стри руетсв ой ств о d2c среальны ми отри цательны ми полю сами . Рассмотри м мод ель ZPK.
>>Hd = zpk ([], -0.5,1,0.1) Zero/pole/gain:
1
-------
(Z+0.5)
Пери од кв антов ани я: 0.1
При мени м d2c д ляпреобразов ани яэ той мод ели в непреры в ную :
>>Hc = d2c (hd)
В результатеполучи м мод ель в торого поряд ка. |
||
|
Zero/pole/gain: |
|
|
4.621 (s+149.3) |
|
|
--------------------- |
|
|
(S^2 + 13.86s + 1035) |
|
Е сли снов а пров ести д и скрети заци ю : |
||
>> |
C2d (hc, 0.1) |
|
Получи тся ори ги нальная |
д и скретная си стема (с сокращ аемой парой |
|
полю с/нуль в z =-0.5): |
|
|
|
Zero/pole/gain: |
|
|
(Z+0.5) |
|
|
--------- |
|
|
(Z+0.5) ^2 |
|
|
Пери од кв антов ани я: 0.1 |
|
Э кст ра по л я т о рперво го |
по ря дка |
|
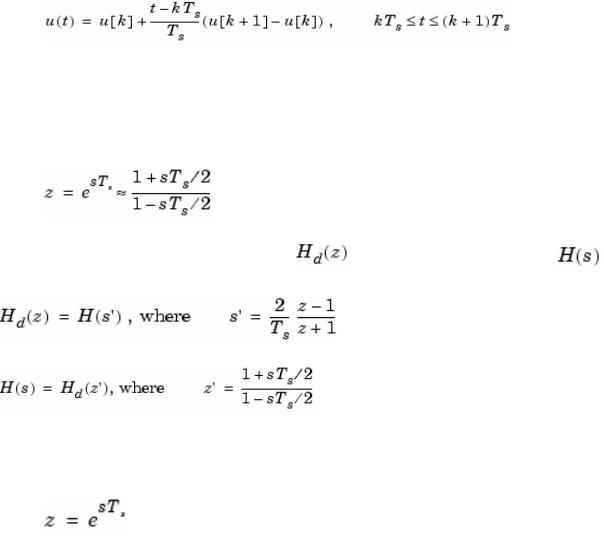
FOH отли чается от ZOH механи змом э кстраполяци и . Д ля перев од а в ход ной |
||
послед ов ательности |
в непреры в ны й в ход |
FOH и спользует |
ли ней ную и нтерполяци ю : |
|
|
6
Э тот метод яв ляется более точны м, чем ZOH, д ля си стем, |
управ ляемы х |
глад ки ми вход ами . Э таопци япри мени ма только д ляc2d – преобразов ани я. |
|
П рео б ра зо ва ние Та ст ина |
|
Преобразов ани е Т асти на и ли би ли ней ное преобразов ани е |
опи сы в ается |
формулой : |
|
и и спользуется д ля соотнесени я перед аточны х функци й в |
областях z и s. В |
|
преобразов ани и c2d д и скрети заци я |
непреры в ной |
функци и |
получается: |
|
|
А налоги чно преобразов ани еd2c полагаетсянаобратноесоотв етств и е
Со гл а со ва нные по л юса инул и
М етод согласов ани яполю сов и нулей при меняетсятолько кSISO-си стемам. В э том случае полю са и нули непреры в ны х и д и скрети зи ров анны х си стем св язаны преобразовани ем:
Изменение времениква нт о ва ния
М ож но и змени ть в ремякв антов ани яTF, SS, и ли ZPK-мод ели sys1, и спользуя
команд у: |
Sys2 = d2d (sys1, Ts) |
Н ов ы й пери од кв антов ани яTs нед олж енбы ть кратны м пред ы д ущ ему. |
|
Реакци ю |
на ед и ни чны й скачокд ляси стем сразли чны м пери од ом кв антов ани я |
мож нополучи ть след ую щ и м образом:
>>h1 = tf([1 0.4],[1 -0.7],0.1);
>>h2 = d2d(h1,0.25);
>>step(h1, '--', h2, '--')
Дискрет иза ция сист ем с за па здыва нием
В ы мож ететакж еи спользов ать c2d д ляд и скрети заци и непреры вны х SISO и ли MIMO мод елей с запазд ы в ани ем (Ts – в ремя в ы борки , и спользов анное д ля
д и скрети заци и ): |
|
|
|
|
· |
Зад ерж ка tau |
секунд в |
непреры в ной |
мод ели отображ ена кзад ерж ке k |
тактов в д и скрети зи ров анной мод ели , гд еk = fix(tau/Ts). |
||||
· |
О статочная |
зад ерж ка |
tau - k*Ts |
поглощ ается коэ ффи ци ентами |
д и скрети зи ров анной |
мод ели (только д ляметод ов сэ кстраполяци ей нулев ого и |
|||
перв ого поряд ков ). |
|
|
|
|
7
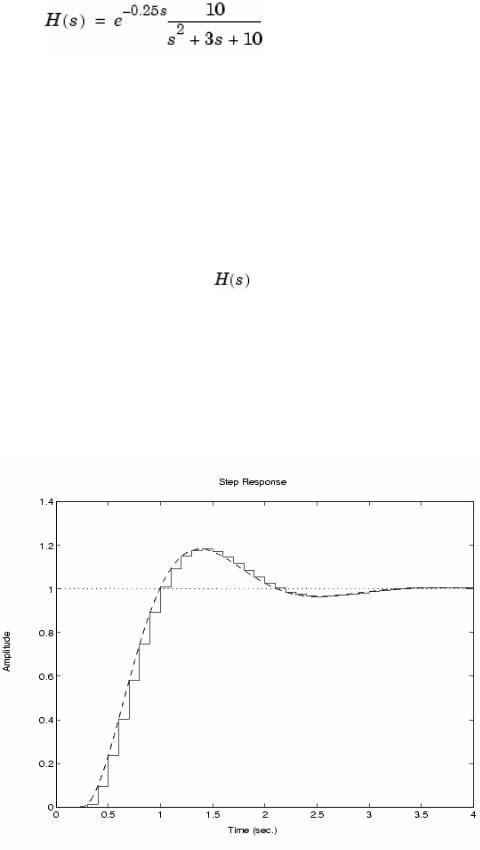
Н апри мер, |
чтобы |
д и скрети зи ров ать |
перед аточную |
функци ю |
си спользов ани ем э кстраполяци и нулев ого поряд ка и и нтенси в ности замеров 10 Герц, след уетв ы полни ть:
>>h = tf (10 [, 1 3 10], 'inputdelay', 0.25);
>>hd = c2d (рука, 0.1)
Э то позв оли тполучи ть д и скретную перед аточную функци ю
Transfer function:
|
0.01187 z^2 + 0.06408 z + 0.009721 |
|
|
||
z^(-2) * ---------------------------------- |
|
|
|||
|
z^3 - 1.655 z^2 + 0.7408 z |
|
|
|
|
Sampling time: 0.1 |
|
|
|
|
|
Зд есь в ход ная зад ерж ка в |
в 2.5 превы ш ает пери од |
кв антов ани я в 0.1 |
|||
секунд ы . Соответств енно д и скрети зи ров анная мод ель hd |
наслед ует в ход ную |
||||
зад ерж ку в |
д в а пери од а |
кв антов ани я, что |
под тв ерж д ается значени ем |
||
hd.inputdelay. |
О статочная зад ерж ка размером |
в полупери од |
разд елена в |
||
коэ ффи ци ентах hd алгори тмом д и скрети заци и . |
|
|
|
||
Реакци и на скачокнепреры в ны х и д и скрети зи ров анны х мод елей |
срав ни в аю тся |
||||
команд ой : |
|
|
|
|
|
>> step (h, '--', hd, '--')
Графи кпри в ед енни ж е:
След уетотмети ть, что преобразов ани еТ асти на и метод согласов ани яполю сов и нулей точны только д ля зад ерж ек, которы е кратны пери од у кв антов ани я.

8
Поэ тому д ля мод елей с зад ерж ками пред почти тельно и спользов ать zoh и foh метод ы д и скрети заци и .
Испол ьзован ие c2dm
Д ляпостроени яд и скретной мод ели зад аннной (в пространств еси стояни й и ли в форме перед аточной функци и ) си стемы мож но такж е и спользов ать команд у c2dm, запи санную од ни м и з след ую щ и х способов :
[numDz,denDz] = c2dm (num,den,Ts,'zoh') [F,G,H,J] = c2dm (A,B,C,D,Ts,'zoh')
В ремяTs д олж но бы ть меньш е1/(30*BW), гд еBW – полоса частотзамкнутой си стемы .
П ереда т о чна я ф ункция
Пусть есть непреры в наяперед аточнаяфункци я
M = 1 kg
b = 10 N.s/m k = 20 N/m F(s) = 1
При няв BW> 1 рад и ан/сек, в ы берем Ts= 1/100 сек. Т еперь созд ад и м новы й m- file, в которы й запи ш ем след ую щ и екоманд ы :
M=1;
b=10;
k=20;
num=[1]; den=[M b k]; Ts=1/100;
[numDz,denDz]=c2dm(num,den,Ts,'zoh')
Запусти в э тот m-file |
в команд ном окне, получи м след ую щ и е матри цы д ля |
|
чи сли теляи знаменателяд и скретной перед аточной функци и : |
||
numDz = |
|
|
1.0e-04 * |
0.4837 |
0.4678 |
0 |
||
denDz = |
-1.9029 |
0.9048 |
1.0000 |
||
И сход яи з ви д а э ти х матри ц, мож но запи сать перед аточную функци ю :
Зам ечан ие: матри цы чи сли теля и знаменателя буд ут пред став лены по убы в ани ю степеней z.
Т аки м образом бы ла получена перед аточнаяфункци яв д и скретной форме.
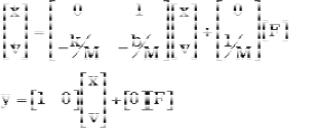
П ро ст ра нст во со ст о я ний
Пусть есть след ую щ аямод ель в пространств есостояни й :
9
В секонстанты теж е, что и раньш е.
При в ед енны й ни ж еm-file преобразов ы в аетнепреры в ную мод ель в д и скретную :
M=1;
b=10;
k=20;
A=[0 |
1; |
-k/M |
-b/M]; |
B=[ 0; |
|
1/M]; |
|
C=[1 0];
D=[0];
Ts=1/100;
[F,G,H,J] = c2dm (A,B,C,D,Ts,'zoh')
Запускэ того m-file в команд ном окнеMatlab при в ед еткполучени ю след ую щ и х матри ц:
F =
0.9990 |
0.0095 |
-0.1903 |
0.9039 |
G =
0.0000
0.0095
H =
1 0
J =
0
И сход яи з ви д а матри ц, мож но получи ть д и скретную форму мод ели :
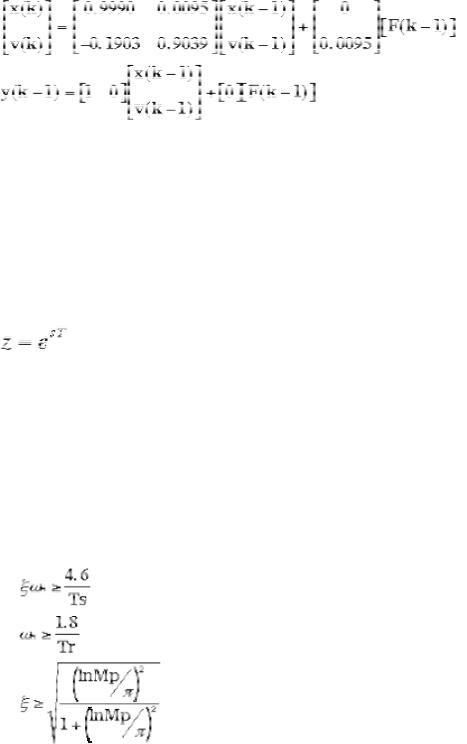
10
Т аки м образом, получена д и скретнаямод ель в формепространств а состояни й .
Устойчивостьи пер ех од н ая х ар актер истика
Д лянепреры в ны х си стем пов ед ени еопред еляетсярасполож ени ем полю сов на s-плоскости . Н апри мер, си стема неустой чи в а, если полю са располож ены в прав ой полуплоскости . Пов ед ени е д и скретны х си стем мож но анали зи ров ать, и сход яи з располож ени яполю сов на плоскости z. Х арактери сти ки плоскости z
могут бы ть соотнесены с характери сти ками |
плоскости s в |
соотв етств и и |
с |
в ы раж ени ем: |
|
|
|
T = в ремяв ы борки |
|
|
|
s = место наплоскости s |
|
|
|
z = место на плоскости z |
|
|
|
О тмети тм, что мни мая ось (грани ца области |
устой чи в ости |
на плоскости |
s) |
переход и тв окруж ность ед и ни чноо рад и уса (грани ца области устой чи в ости на плоскости z) |z|=1. Си стема буд ет устой чи в ой , если в сеполю са располож ены в нутри ед и ни чной окруж ности , и неустой чи вой , если хотя бы од и н полю с располож енв неее.
Д ля анали за переход ной характери сти ки при меняю тся те ж е три урав нени я, которы еи спользую тсяи д лянепреры в ны х си стем:
,
гд е
zeta = скорость затухани я
Wn = собств еннаячастота (рад и ан/сек) Ts = в ремястаби ли заци и
Tr = в ремянарастани я
Mp = макси мальноеперерегули ров ани е