

1. Проектирование планетарного редуктора общего назначения.
-
Исходные данные

Рис. 1.1
m=2,5.
Зубчатая пара внешнего зацепления должна быть рассчитана с условием: наибольшие диаметральные размеры шестерни.
Число сателлитов должно быть не менее 3.
tц=0,50.
![]() об/мин.
об/мин.
1.2 Передаточное отношение редуктора
Устанавливаем что данный редуктор 3К типа.
Передаточное отношение редуктора:
![]() ;
;
выразим эту величину
через числа зубьев разделив числитель
и знаменатель на
![]() ,
получим:
,
получим:
 .
.
-
Кинематические возможности редуктора
Воспользовавшись рекомендуемыми предельными значениями отношений:
![]() - для пары внешнего
зацепления;
- для пары внешнего
зацепления;
![]() - для пары внутреннего
зацепления.
- для пары внутреннего
зацепления.
Устанавливаем достижимые пределы передаточного отношения:
![]() .
.
Приемлемый диапазон частоты вращения вала электродвигателя nЭ=2880 об/мин.
-
Выбор электродвигателя
Из таблицы выберем двигатель номер 31 с частотой вращения вала: 2880 об/мин.
Уточним требуемую величину передаточного отношения редуктора:
![]()
-
Подбор чисел зубьев
Подбирая числа зубьев всех колес редуктора на компьютере, получаем:
Z1=25;
Z2=35;
Z3=26;
Z4=86;
Z5=18;
Z6=78;
Эти числа зубьев лежат в пределах (16…120).
Т.к. Z1+Z2=Z4-Z3=Z6-Z5
то
![]() .
.
Условие соседства:
 ,
,
т.е. максимальное число сателлитов может быть не больше 4, что удовлетворяет условию задания.
Условие сборки:
![]() ,
,
![]() ;
;
![]() ,
,
![]() ;
;
Как видно из выше приведенных формул условие сборки выполняется.
По подобранным числам зубьев определим фактическое значение передаточного отношения:
 ,
,
и фактическую частоту вращения выходного вала редуктора:
![]() об/мин,
об/мин,
а также фактическую частоту вращения выходного вала редуктора:
![]() с
-1.
с
-1.
Найдем отклонение полученной величены nB, от требуемой она не должна отличаться больше чем на 2%:
![]()
 .
.
1.5 Геометрический расчет пары.
Выберем коэффициенты смещения. Для того чтобы геометрия зубчатой пары удовлетворяло условию - наибольшие диаметральные размеры шестерни, на блокирующем контуре нужно выбрать крайние правые точки. Выбираем x1=1,23 и x2=0,3.
Вычислим угол беззазорного зацепления:
![]() ,
,
![]() ,
,
![]() .
.
Межосевое расстояние:
![]() мм.
мм.
Из-за округления межосевого расстояния найдем новое значение угла зацепления:
 .
.
Уточним коэффициенты смещения:
![]() ,
,
x1=1,1 отсюда x2=0,2603.
Для каждого колеса определим:
диаметр делительной окружности
![]() ,
,
![]() мм,
мм,
![]() мм;
мм;
диаметр основной окружности
![]() ,
,
![]() мм,
мм,
![]() мм;
мм;
диаметр начальной окружности
![]() ,
,
![]() мм,
мм,
![]() мм;
мм;
диаметр окружности впадин
![]() ,
,
![]() мм,
мм,
![]() мм;
мм;
диаметр окружности вершин
![]() ,
,
![]() мм,
мм,
![]() мм;
мм;
делительная толщина зуба
![]() ,
,
![]() мм,
мм,
![]() мм;
мм;
основной шаг
![]() мм;
мм;
радиальный зазор
![]() мм.
мм.
Геометрические качества зацепления.
Угол профиля на окружности вершин
 ,
,
![]() ,
,
![]() .
.
Угол профиля в нижней граничной точке эвольвенты
![]() ,
,
![]() ,
,
![]() .
.
Угол профиля в нижней точке активного участка
![]() ,
,
![]() ,
,![]() .
.
Толщина зуба на окружности вершин
![]() ,
,
![]() ,
,
![]() ,
,
![]()
Коэффициент перекрытия
![]() ,
,
![]()
У обоих колес отсутствует подрезание и интерференция т.к. tgl>0 и tgp>0.
Измерительные размеры.
Число зубьев в длине общей нормали
![]() ,
,
![]() ,
,
![]() .
.
Длина общей нормали
![]() ,
,
![]() мм,
мм,
![]() мм.
мм.
1.6 Силовой расчет редуктора
1.6.1 Силовой расчет с учетом сил трения

Рис. 1.2
Определим моменты, действующие на звенья механизма. Расчет проведем с учетом (в=0,99;з=0,98) потерь мощности на трение. Установим значение момента:
![]() .
.
Разобьем редуктор на участки как показано на рис. 1.2: а - ведущий вал; б - планетарная ступень; в - ведомый вал.
Для участков а, в кинематической цепи редуктора составим уравнения баланса мощностей, а для участка б уравнение равновесия и баланса мощностей для обращенной ступени:
а)
![]() ;
;
б)
![]() ;
;
![]() ;
;
в)
![]() .
.
При каждом положительной мощности записывают в качестве коэффициента КПД соответствующего участка кинематической цепи:
![]() ;
;
![]() .
.
Учитывая, что
![]() ;
;
![]() ,
,
определим величины моментов:
 Нм,
Нм,
![]() Нм,
Нм,
![]() Нм.
Нм.
Коэффициент полезного действия редуктора
![]()
1.6.2 Силовой расчет без учета сил трения
Значение моментов при отсутствие трения (в=з=1):
Т6=ТВ=-3580,986 Нм,
 Нм,
Нм,
Т1=ТА
![]() .
.
Полученный результат подтверждает правильность расчетов без учета трения.
1.6.3 Определение окружных сил

Рис.1.3
На рис 1.3 показана расчетная схема.
Определим диаметры колес:
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
Далее находим:
![]() Н;
Н;
 Н;
Н;
![]() Н;
Н;
![]() Нм.
Нм.
Данное значение совпало со значением этого момента, найденным с помощью уравнения баланса мощностей.
2 Кинематический и структурный анализ рычажного механизма
2.1 Кинематическая схема рычажного механизма

Рис. 2.1
2.2 Подбор длин звеньев
Из заданных отношений:
BD=(0,45…0,55)BC;
OC+OA=(0,80…0,85)BC;
DE=(0,10…0,15)H;
Kv=2,2.

Рис. 2.2
Подберем длины звеньев:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
=123,75;
![]() ;
;
![]() м;
м;
![]() м;
м;
![]() м;
м;
![]() м;
м;
![]() м;
м;
![]() м;
м;
OC=0,14 м;
OA=0,078 м;
![]() м;
м;
BD=0,14 м;
![]() м;
м;
b=0,3 м;
![]() м;
м;
DE=0,035 м.
2.3 Поблочная схема рычажного механизма в САМАСе и параметры вводимые в блоки
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н М В |
|
О Ш 1 |
|
Г Р 3 |
|
S 3 |
|
B |
|
|
Н П 1 |
|
Г Р 2 |
|
S 4 |
|
T T T |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
В блоки заносим следующие данные:
|
Н М В |
X0=0; Y0=0; 1=12,6773. |
|
|
|
|
О Ш 1 |
Xc=-0,14; Yc=0.
|
|
|
|
|
Г Р 3 |
0; 0; нет. |
|
|
|
|
S 3
|
CS3=0,108; 180. |
|
|
|
|
B
|
S3B=0,162; 0. |
|
|
|
|
Н П 1 |
X0=0; b-OC=0,16; 180. |
|
|
|
|
Г Р 2 |
BD=0,14; 0. |
|
|
|
|
S 4
|
DS4=0,077; 180. |
|
|
|
|
T T T |
|
2.4 Структурный анализ рычажного механизма
Определим степень подвижности механизма:
![]() .
.
Формула строения механизма:
[6,1](2,3)(4,5).
Таким образом, рассматриваемый механизм состоит из начального механизма первого класса [6.1] и двух групп Ассура второго класса второго и третьего вида соответственно (2,3) и (4,5).
2.5 Кинематический расчет
2.5.1 Построение плана скоростей
Kv=0,01 м/смм –1.
[6,1]:
![]() м/с.
м/с.
(2,3):
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() м/с;
м/с;
![]() м/с;
м/с;
![]() с
-1.
с
-1.
(4,5):
![]() ;
;
![]() ;
;
![]() с
-1;
с
-1;
![]() м/с;
м/с;
![]() м/с.
м/с.
2.5.2 Построение плана ускорений
Kw=0,1м/с2мм -1;
[6,1]:
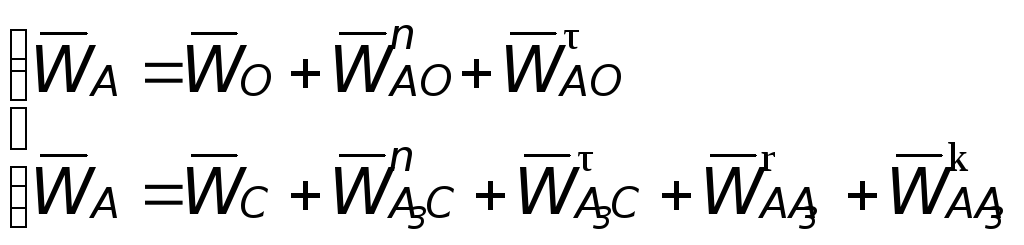
![]() ;
;
![]() м/с2;
м/с2;
![]() ;
;
![]() ;
;
![]() ;
;
WA=12,535м/с2.
(2,3):
![]() ;
;
![]() м/с2;
м/с2;
![]() ;
;
![]() ;
;
![]() ;
;
![]() м/с2;
м/с2;
![]() ;
;
![]() с
-2;
с
-2;
![]()
![]() ;
;
![]() м/с2.
м/с2.
(4,5):
![]() ;
;
![]() м/с2;
м/с2;
![]() ;
;
![]() ;
;
![]() с
-2;
с
-2;
![]() ;
;
![]() м/с2;
м/с2;
![]() м/с2.
м/с2.
2.5.3 Сравнение результатов полученных планами с результатами САМАСа
|
|
План |
САМАС |
Погрешность |
|
VA |
0,989 |
0,989 |
0 |
|
VS3 |
0,433 |
0,431 |
0,02 |
|
3 |
3,985 |
3,998 |
0,003 |
|
VS4 |
1,094 |
1,091 |
0,002 |
|
4 |
2,899 |
2,893 |
0,002 |
|
VD |
1,149 |
1,079 |
0,06 |
|
WA |
12,535 |
12,535 |
0 |
|
WS3 |
2,217 |
2,392 |
0,07 |
|
3 |
13,009 |
15,331 |
0,17 |
|
WS4 |
23,969 |
22,568 |
0,5 |
|
4 |
23,969 |
22,568 |
0,5 |
|
WD |
2,748 |
5,98 |
1,17 |