

На шинах нагрузки в исходном режиме принять UН = 110 кВ, cosφ0 = 0,97 для всех соединений.
Расчет статической устойчивости двухмашинной системы с арв генераторов пропорционального действия
Для данной схемы энергосистемы требуется привести все параметры к базисным условиям, представляя нагрузку неизменным сопротивлением. Определить сопротивления связи ЭДС генераторов с шинами нагрузки и полученную Т-образную систему преобразовать в П-образную, определив собственные и взаимные сопротивления и их дополняющие углы. По найденным параметрам определить статические характеристики генераторов и границы статической устойчивости системы. Сделать выводы.
Составление электрической схемы замещения
АРВ ПД генераторов в электрической схеме замещения учитываем как E'=const и XГ = X'd.
Примем базисные величины:
Sб =1000 МВА;
UбI = 110 кВ;
Базисные напряжения на остальных ступенях трансформации рассчитываем по номинальным коэффициентам трансформации в соответствии с рис. 1:




Рис. 2. Электрическая схема замещения для схемы с генераторами с АРВ ПД.
Определяем реактивные сопротивления схемы замещения в относительных единицах:




Модуль полной мощности нагрузки согласно табл. 2 и прим. 5:

Общую нагрузку генераторов замещаем неизменным сопротивлением.
Сопротивление нагрузки в о.е.:

Преобразование схемы замещения
Рис. 3. Т-образная схема замещения при участии генераторов с АРВ ПД.
Продольные сопротивления:
![]()
![]()
Собственные и взаимное сопротивления схемы замещения:



Дополняющие углы сопротивлений:
![]()
![]()
![]()
Расчет исходного режима
Потоки мощности от станции "А" (индекс 1) и от станции "Б" (индекс 2) в точке подключения нагрузки в о.е.:
Векторы переходных ЭДС определяем по второму закону Кирхгофа в соответствии с выражением (11) [1] (напряжение на шинах подключения нагрузки в о.е. равно 1):
Относительный угол между векторами переходных ЭДС в исходном режиме:

Расчет статических характеристик
Расчет статических характеристик для двухмашинной системы ведем по выражениям (12), (13) [1]:
Проверка по исходному режиму:

0,512 = 0,512(о.е.), 0,4 = 0,4(о.е.) – проверка выполняется.
Построение статических характеристик электромагнитных мощностей для станций "А" и "Б" приведено на рис. 4.
Максимальные значения электромагнитных мощностей станций:
![]()
Коэффициенты запаса статической устойчивости для каждой станции в исходном режиме:
Для нахождения границ статической апериодической устойчивости эквивалентные постоянные инерции станций приведем к базисным условиям и найдем их отношение:
Тогда границы статической апериодической устойчивости определятся из условия равенства нулю удельного относительного ускорения роторов эквивалентных генераторов станций:

Рис.4. Угловые характеристики электромагнитной мощности двухмашинной системы.
Выводы:
Прямая а
отображает исходный режим при
![]() .
Прямые
.
Прямые
![]() и
и
![]() определяют границы устойчивости системы.
Между прямыми величина удельного
ускорения второй электростанции
относительно первой больше нуля (а21>0),
что свидетельствует о том, что система
возвращается в исходное состояние, т.
е. она устойчива.
определяют границы устойчивости системы.
Между прямыми величина удельного
ускорения второй электростанции
относительно первой больше нуля (а21>0),
что свидетельствует о том, что система
возвращается в исходное состояние, т.
е. она устойчива.
Для анализа
статической апериодической устойчивости
двухмашинной системы необходимо
применить метод малых колебаний. Анализ
производится при помощи формулы удельного
относительного ускорения роторов
генераторов станций А и В:
![]() .
Если а21>0, то система устойчива,
и наоборот, при а21<0 система
является неустойчивой.
.
Если а21>0, то система устойчива,
и наоборот, при а21<0 система
является неустойчивой.
В точке b
станция А имеет действительный предел
мощности (![]() ),
чему соответствует
),
чему соответствует
![]() ,
следовательно, а21>0, т. е. система
устойчива.
,
следовательно, а21>0, т. е. система
устойчива.
В точке с1
характеристика мощности
![]() имеет минимум
имеет минимум
![]() .
При задании малого приращения
.
При задании малого приращения
![]() ,
очевидно, что
,
очевидно, что
![]() .
Здесь а21<0, что соответствует
неустойчивой системе.
.
Здесь а21<0, что соответствует
неустойчивой системе.
В точке d
станция Б имеет действительный предел
мощности (
),
![]() ,
что соответствует а21>0. Значит,
в данной точке система будет устойчива.
,
что соответствует а21>0. Значит,
в данной точке система будет устойчива.
В точке e
характеристика мощности
![]() имеет минимум
.
Малому приращению
соответствует
имеет минимум
.
Малому приращению
соответствует
![]() ,
что свидетельствует о неустойчивости
системы, т.к. а21<0.
,
что свидетельствует о неустойчивости
системы, т.к. а21<0.
Расчет статической устойчивости двухмашинной системы с арв генераторов сильного действия
Задание на расчет и решение аналогичны предыдущему пункту, за исключением представления АРВ генераторов на схеме замещения.
Составление электрической схемы замещения
 АРВ
СД генераторов в электрической схеме
замещения учитываем как UГ=const
и XГ = 0. Поэтому для
АРВ СД в схеме рис. 3 будут отсутствовать
XГ, а E'
сменится на шины с UГ.
Преобразованная схема предстанет в
следующем виде.
АРВ
СД генераторов в электрической схеме
замещения учитываем как UГ=const
и XГ = 0. Поэтому для
АРВ СД в схеме рис. 3 будут отсутствовать
XГ, а E'
сменится на шины с UГ.
Преобразованная схема предстанет в
следующем виде.
Рисунок 5. Т-образная схема замещения при участии генераторов с АРВ СД.
Продольные сопротивления изменятся следующим образом:
![]()
![]()
Собственные и взаимное сопротивления схемы замещения:
 Дополняющие
углы сопротивлений:
Дополняющие
углы сопротивлений:
Расчет исходного режима
Векторы напряжения на шинах электрических станций "А" и "Б" в исходном режиме:
Относительный угол между векторами напряжения в исходном режиме:

Расчет статических характеристик

Проверка по результатам исходного режима:
 0,509
0,509![]() 0,512(о.е.),
0,4 = 0,4(о.е.) – проверка выполняется.
0,512(о.е.),
0,4 = 0,4(о.е.) – проверка выполняется.
Построение статических характеристик электромагнитных мощностей для станций "А" и "Б" приведено на рис. 6.
Максимальные значения электромагнитных мощностей станций:
![]()
Коэффициенты запаса статической устойчивости для каждой станции в исходном режиме:
Определим границы статической апериодической устойчивости:

Рис.6. Угловые характеристики электромагнитной мощности двухмашинной системы.
Выводы:
Прямая
а
отображает исходный режим при
![]() .
Прямые
.
Прямые
![]() и
и
![]() определяют границы устойчивости системы.
Между прямыми величина удельного
ускорения второй электростанции
относительно первой больше нуля (а21>0),
что свидетельствует о том, что система
возвращается в исходное состояние, т.
е. она устойчива.
определяют границы устойчивости системы.
Между прямыми величина удельного
ускорения второй электростанции
относительно первой больше нуля (а21>0),
что свидетельствует о том, что система
возвращается в исходное состояние, т.
е. она устойчива.
Для анализа статической апериодической устойчивости двухмашинной системы необходимо применить метод малых колебаний. Анализ производится при помощи формулы удельного относительного ускорения роторов генераторов станций А и В: . Если а21>0, то система устойчива, и наоборот, при а21<0 система является неустойчивой. Анализ данных характеристик аналогичен анализу характеристик для генераторов с АРВ ПД.
АРВ пропорционального действия (АРВ ПД) осуществляет регулирование
возбуждения
по величине и знаку отклонения напряжения
на зажимах СМ от заданного напряжения
(по одному параметру -
![]() ).
Так как АРВ ПД не успевает реагировать
на изменение
,
то постоянно существует переходный
процесс, поэтому генераторы с АРВ ПД
учитываются в схеме замещения переходным
сопротивлением и ЭДС за ним.
).
Так как АРВ ПД не успевает реагировать
на изменение
,
то постоянно существует переходный
процесс, поэтому генераторы с АРВ ПД
учитываются в схеме замещения переходным
сопротивлением и ЭДС за ним.
АРВ сильного действия (АРВ СД) регулирует возбуждение синхронной машины не только по отклонению параметров, но и по скорости и ускорению их изменения.
Выполнив анализ угловых характеристик электромагнитной мощности двухмашинной системы с АРВ ПД и АРВ СД (рис. 5 и рис. 6 соответственно), можно сделать вывод о том, что максимумы передаваемых мощностей со станций А и Б будут иметь большие значения при наличии генераторов с АРВ СД. Это связано с тем, что при составлении схемы замещения исследуемой двухмашинной системы с генераторами, имеющими АРВ ПД, учитывается переходное сопротивление генераторов станций, что приводит к увеличению значений собственных и взаимного сопротивлений генераторов. Согласно выражениям 12, 13 [1, стр. 15] для расчёта характеристик электромагнитных мощностей станций А и Б, величина мощности обратнопропорциональна величинам собственных и взаимного сопротивлений (увеличение сопротивлений приводит к снижению значения передаваемой мощности). Поэтому характеристики мощности станций с генераторами, имеющим АРВ ПД лежат ниже, чем соответствующие характеристики мощности станций с генераторами, имеющими АРВ СД.
Устойчивость
двухмашинной системы определяется
поведением относительного угла между
векторами переходных ЭДС станций А и Б
![]() .
Для станций, имеющих генераторы с АРВ
СД, получили значение
большее, чем для аналогичных станций с
генераторами с АРВ ПД. Это позволяет
сделать вывод о том, что для станции с
АРВ СД имеют большую статическую
устойчивость, чем станции с АРВ ПД, т.е.
векторы переходных ЭДС генераторов
станций А и Б, могут быть сдвинуты
относительно друг друга на больший
угол, обеспечивающий устойчивую работу
генераторов.
.
Для станций, имеющих генераторы с АРВ
СД, получили значение
большее, чем для аналогичных станций с
генераторами с АРВ ПД. Это позволяет
сделать вывод о том, что для станции с
АРВ СД имеют большую статическую
устойчивость, чем станции с АРВ ПД, т.е.
векторы переходных ЭДС генераторов
станций А и Б, могут быть сдвинуты
относительно друг друга на больший
угол, обеспечивающий устойчивую работу
генераторов.
Анализ динамической устойчивости Расчет предельного угла и времени отключения кз для одномашинной системы
Для схем нормального, аварийного и послеаварийного режимов необходимо найти сопротивление связи и, принимая ЭДС эквивалентного генератора станции "А" во всех режимах постоянной и равной переходной, а напряжение на шинах подключения нагрузки неизменным, рассчитать статические характеристики электромагнитных мощностей и провести по ним анализ динамической устойчивости генератора.
Нормальный режим
Согласно заданию в нормальном режиме генераторы станции "А" работают на шины неизменного напряжения и частоты (UС = UН = const, ω = const), передавая активную мощность P0 = P1(0) через Т1, Т2, двухцепную ЛЭП и Т4 (рис. 7).
Р ис.
7. Схема замещения одномашинной системы
в нормальном режиме.
ис.
7. Схема замещения одномашинной системы
в нормальном режиме.
Т.к. в приближенных расчетах в течение всего динамического перехода генераторы замещаются переходной ЭДС за переходным сопротивлением, то параметры для характеристики нормального режима можно принять из предыдущего раздела (для генераторов с АРВ ПД):
В этих условиях при неучете активных сопротивлений элементов сети характеристика электромагнитной мощности генераторов станции "А" нормального режима будет описываться выражением (стр. 18 [1]):

Проверка по исходному режиму:

Аварийный режим (двухфазное кз на землю)
На расстоянии LК
от шин станции "А" на одной из цепей
линии происходит двухфазное КЗ на землю
(К(1,1)), появляется поперечная
несимметрия. В этом случае схема замещения
представляет собой схему замещения
нормального режима, в которой между
точкой КЗ и землей подключен шунт,
составленный из параллельно соединенных
суммарных сопротивлений схем обратной
и нулевой последовательности (рис. 8).
Рис. 8. Схема замещения одномашинной системы в аварийном режиме.
Сопротивления участков линии до и после точки КЗ (отношение LК/L берется из табл. 2):
Сопротивление шунта в схеме, эквивалентной токам прямой последовательности:

Для определения сопротивления шунта найдем суммарные сопротивления схем обратной и нулевой последовательностей.
В схеме замещения обратной последовательности
отсутствуют ЭДС источников, в точке КЗ
имеет место напряжение обратной
последовательности и сопротивление
эквивалентного генератора изменено на
сопротивление токам обратной
последовательности (рис. 9).
схеме замещения обратной последовательности
отсутствуют ЭДС источников, в точке КЗ
имеет место напряжение обратной
последовательности и сопротивление
эквивалентного генератора изменено на
сопротивление токам обратной
последовательности (рис. 9).
Рис. 9. Схема замещения обратной последовательности.
Пересчитаем сопротивление эквивалентного генератора станции для токов обратной последовательности (сопротивление одного генератора токам обратной последовательности в о.е., приведенное к его номинальным параметрам дано в табл. 1):

Для определения X2Σ упростим схему замещения обратной последовательности. Прежде всего, треугольник XЛ, X'Л, X''Л преобразуем в эквивалентную звезду:



Рис. 10. Упрощение
схемы замещения обратной последовательности.
Находим эквивалентные сопротивления схемы обратной последовательности:

Суммарное сопротивление схемы обратной последовательности:

Рис. 11. Эквивалентная
схема замещения обратной последовательности.
В схеме замещения нулевой последовательности отсутствуют ЭДС источников и сопротивления за обмоткой эквивалентного трансформатора, соединенной в треугольник, в точке КЗ имеет место напряжение нулевой последовательности, схема двухцепной ЛЭП преобразована с учетом влияния грозозащитного троса и взаимной индуктивности цепей (рис. 12).
Рис. 12. Схема замещения нулевой последовательности.
Пересчитываем сопротивление цепи линии (также участков цепи относительно точки КЗ) и определяем сопротивления взаимоиндукции с учетом примечания 4 к исходным данным:
Для определения X0Σ упростим схему замещения нулевой последовательности. Прежде всего, треугольник XЛ0-XМ, X'Л0-X'М, X"Л0-X"М преобразуем в эквивалентную звезду (запись знаменателя обусловлена равенствами XЛ0 = X'Л0 + X''Л0 и XМ = X'М + X''М):



Рис. 13. Упрощение
схемы замещения нулевой последовательности.
Находим эквивалентные сопротивления схемы нулевой последовательности:

Суммарное сопротивление схемы нулевой последовательности:

Рис. 14. Эквивалентная
схема замещения нулевой последовательности.
Зная суммарные сопротивления схем обратной и нулевой последовательностей, найдем сопротивление шунта в схеме, эквивалентной токам прямой последовательности и преобразуем эту схему.

Рис. 15. Упрощение
схемы эквивалентной токам прямой
последовательности.
Здесь сопротивления эквивалентной звезды X1, X2, X3 равны соответствующим сопротивлениям, полученным при преобразовании схемы обратной последовательности:
![]()
Для полученной Т-образной схемы замещения сопротивление связи определится по формуле преобразования звезды в эквивалентный треугольник:

Получим:

Тогда характеристика электромагнитной мощности аварийного режима запишется как:

Послеаварийный режим
После возникновения КЗ происходит отключение поврежденной фазы ЛЭП, поэтому в схеме послеаварийного режима сопротивление линии будет в два раза больше (ср. со схемой рис. 7).
Р ис.
16. Схема замещения одномашинной системы
в послеаварийном режиме.
ис.
16. Схема замещения одномашинной системы
в послеаварийном режиме.
Сопротивление связи в послеаварийном режиме:
![]()
Тогда характеристика электромагнитной мощности послеаварийного режима запишется как:

Расчет предельного угла отключения места кз
По итогам расчета характеристик электромагнитных мощностей строим зависимости P(i)(δ). При превышении мощности турбины над электромагнитной мощностью роторы генераторов начнут ускоряться, т.к. момент турбины является для генератора ускоряющим. В противном случае роторы генераторов станции "А" будут замедляться. Графически эти процессы представляются площадками ускорения и торможения на графиках статических характеристик электромагнитных мощностей различных режимов. Исходя из равенства площадок ускорения роторов генераторов станции "А" и возможного торможения определяется предельный угол отключения места КЗ.
Статические характеристики приведены и на рис. 17 (значения мощности турбины и исходного угла электропередачи приведены в расчете схемы нормального режима). Угол δ зададим от 0 до 1800
Определим критический угол – угол, после прохождения которого по характеристике послеаварийного режима ротор снова начнет ускоряться.

Предельный угол отключения места КЗ определяем из условия равенства площадок ускорения и возможного торможения роторов генераторов:

![]()
Предельный угол отключения изображен на рис. 17.
Рис.17. Угловые характеристики мощности генератора для нормального, аварийного, послеаварийного режимов.
Расчет предельного времени отключения места кз
Время tот.пр., соответствующее предельному углу отключения, определяется из зависимости δ(t), представляющей собой решение дифференциального уравнения движения роторов генераторов станции "А". Поиск решения дифференциального уравнения ведется методом последовательных интервалов.
Согласно метода весь процесс движения роторов генераторов во времени разбиваем на ряд равных промежутков Δt = 0,05с и определяем постоянный для всех интервалов времени коэффициент, имитирующий ускорение роторов:

где ТjA – эквивалентная постоянная инерции станции "А", приведенная к базисным условиям – определена при нахождении границ статической апериодической устойчивости для двухмашинной системы с АРВ ПД.
1. Первый интервал
На первом интервале определяем избыток мощности, действующий в начале интервала, (по разности механической и электромагнитной мощностей) и рассчитываем приращение угла за интервал с учетом равенства нулю относительной скорости в начале первого интервала:

Определяем значения угла и времени в конце интервала:

2. Второй интервал
На втором и последующих интервалах также определяется избыток мощности в начале интервала, рассчитывается приращение угла за интервал, но с учетом приращения за предыдущий, и определяется значения угла и времени в конце интервала:
Расчет по остальным интервалам времени приведен в таблицу 3.
Таблица 3. Расчет предельного времени отключения места КЗ.
|
|
|
|
t, сек |
град |
отклград |
№ инт |
Р, о.е. |
град |
град |
0 |
33,36 |
71,4 |
1 |
0,300934 |
1,249026 |
34,60903 |
0,05 |
34,60903 |
71,4 |
2 |
0,293995 |
3,689479 |
38,29851 |
0,1 |
38,29851 |
71,4 |
3 |
0,274115 |
5,964906 |
44,26341 |
0,15 |
44,26341 |
71,4 |
4 |
0,244092 |
7,991112 |
52,25452 |
0,2 |
52,25452 |
71,4 |
5 |
0,208465 |
9,721583 |
61,97611 |
0,25 |
61,97611 |
71,4 |
6 |
0,173122 |
11,15867 |
73,13478 |
0,3 |
73,13478 |
71,4 |
7 |
0,144588 |
12,3589 |
85,49368 |
0,35 |
85,49368 |
71,4 |
8 |
0,12921 |
13,43147 |
98,92514 |
0,4 |
98,92514 |
71,4 |
9 |
0,132598 |
14,53216 |
113,4573 |
0,45 |
113,4573 |
71,4 |
10 |
0,159582 |
15,85685 |
129,3142 |
0,5 |
129,3142 |
71,4 |
11 |
0,214627 |
17,63847 |
146,9526 |
0,55 |
146,9526 |
71,4 |
12 |
0,302174 |
20,14682 |
167,0994 |
0,6 |
167,0994 |
71,4 |
13 |
0,425715 |
23,68068 |
190,7801 |
0,65 |
190,7801 |
71,4 |
14 |
0,583187 |
28,52171 |
219,3018 |
0,7 |
219,3018 |
71,4 |
15 |
0,754651 |
34,78606 |
254,0879 |
0,75 |
254,0879 |
71,4 |
16 |
0,881049 |
42,09965 |
296,1875 |
0,8 |
296,1875 |
71,4 |
17 |
0,857027 |
49,21383 |
345,4014 |
0,85 |
345,4014 |
71,4 |
18 |
0,609921 |
54,27679 |
399,6782 |
0,9 |
399,6782 |
71,4 |
19 |
0,267872 |
56,50039 |
456,1786 |
0,95 |
456,1786 |
71,4 |
20 |
0,130067 |
57,58008 |
513,7586 |
1 |
513,7586 |
71,4 |
21 |
0,340649 |
60,40781 |
574,1664 |
1,05 |
574,1664 |
71,4 |
22 |
0,726037 |
66,43464 |
640,6011 |
1,1 |
640,6011 |
71,4 |
23 |
0,88984 |
73,82121 |
714,4223 |
1,15 |
714,4223 |
71,4 |
По данным таблицы 3 строим график зависимости δ(t) (рис. 18), из которого по известному значению δот.пр. определяем tот.пр.. Получаем:
![]()
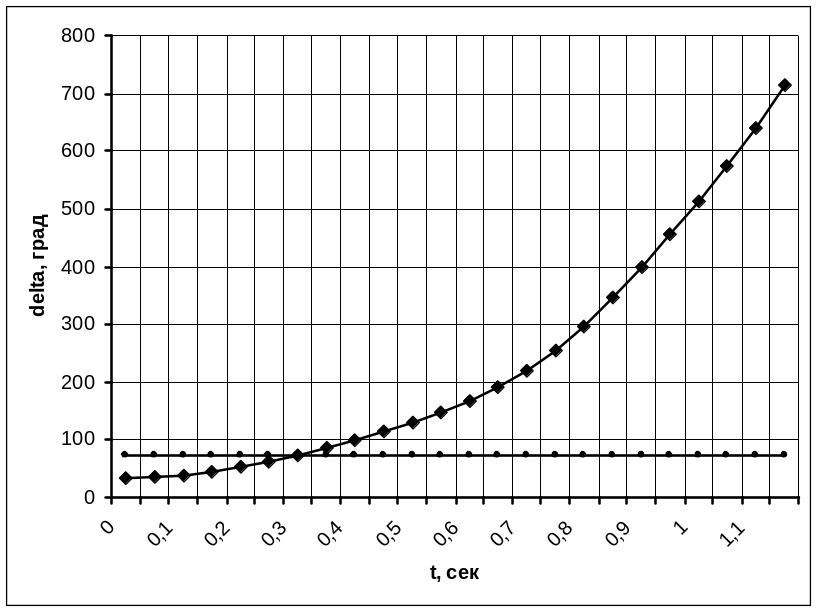
Рис. 18. Определение tот.пр.
Выводы:
В
точке а
мощности турбины и генератора
уравновешивают друг друга. Даная точка
соответствует нормальному режиму работы
одномашинной системы (![]() ,
,
![]() ).
В момент двухфазного КЗ на землю в связи
с изменением параметров схемы происходит
переход с одной характеристики мощности
на другую
).
В момент двухфазного КЗ на землю в связи
с изменением параметров схемы происходит
переход с одной характеристики мощности
на другую
![]() (с характеристики нормального режима
на характеристику аварийного режима).
Т. к. вследствие инерции ротора угол
(с характеристики нормального режима
на характеристику аварийного режима).
Т. к. вследствие инерции ротора угол
![]() мгновенно измениться не может, то
отдаваемая генераторами мощность
уменьшается до значения, соответствующего
точке b
при том же угле
мгновенно измениться не может, то
отдаваемая генераторами мощность
уменьшается до значения, соответствующего
точке b
при том же угле
![]() .
Мощность турбины остается при этом
остается неизменной и равной
.
Мощность турбины остается при этом
остается неизменной и равной
![]() ,
т. к. регуляторы турбин реагируют на
изменения частоты вращения агрегата,
которая сохраняет своё нормальное
значение.
,
т. к. регуляторы турбин реагируют на
изменения частоты вращения агрегата,
которая сохраняет своё нормальное
значение.
В
результате на валу машины возникает
избыточный момент, обусловленный
избытком мощности. Под влиянием этого
момента ротор генератора начинает
ускоряться. Связанный с ротором генератора
вектор ЭДС начинает вращаться быстрее,
чем вращающийся с неизменной синхронной
угловой скоростью вектор напряжения
приемной системы. Это приводит к
возрастанию угла
.
Рабочая точка начинает движение вверх
по кривой
![]() ,
соответствующей аварийному режиму.
,
соответствующей аварийному режиму.
Точка
с
соответствует предельному углу отключения
КЗ (отключение поврежденной линии) –
угол, при котором устойчивая работа
системы сохраняется. Данный угол (![]() )
был определен на основании равенства
площадей ускорения и возможного
торможения, что является признаком
сохранения динамической устойчивости
исследуемой одномашинной системы.
)
был определен на основании равенства
площадей ускорения и возможного
торможения, что является признаком
сохранения динамической устойчивости
исследуемой одномашинной системы.
В
момент отключения КЗ происходит переход
рабочей точки на кривую послеаварийного
режима
![]() .
В результате отдаваемая генераторами
мощность значительно повышается. Теперь
отдаваемая мощность становиться больше
мощности турбины, избыточный момент
меняет свой знак, ротор начинает
тормозиться, двигаясь по кривой
послеаварийного режима
.
В результате отдаваемая генераторами
мощность значительно повышается. Теперь
отдаваемая мощность становиться больше
мощности турбины, избыточный момент
меняет свой знак, ротор начинает
тормозиться, двигаясь по кривой
послеаварийного режима
![]() вследствие инерционности.
вследствие инерционности.
Достигнув на этой кривой некоторой точки, в которой запас избыточной кинетической энергии ротора иссякнет, движение ротора прекратиться. Однако, так как в этой точке имеется избыточный тормозящий момент, начнется относительное движение ротора в обратном направлении. После нескольких колебаний с постепенно затухающей амплитудой относительное движение ротора прекратиться и его положение будет определяться точкой, соответствующей установившемуся режиму на новой характеристике мощности.
Площадь возможного торможения тем больше, чем раньше происходит отключение КЗ. Т. о. быстрая ликвидация аварий может значительным образом повысить устойчивость системы.
Если
угол отключения КЗ окажется больше
значения предельного угла отключения,
то площадка ускорения окажется больше
площадки возможного торможения, и ротор
генератора, не успев затормозить,
проскочит точку f,
соответствующую критическому углу
![]() ,
и начнет вновь ускоряться. Генератор
выпадет из синхронизма.
,
и начнет вновь ускоряться. Генератор
выпадет из синхронизма.
Если же КЗ по какой-либо причине не будет отключено, то ротор генератора продолжит своё дальнейшее ускорение по кривой . Перейдя значение критического угла, генератор выпадет из синхронизма, произойдет развал системы.
Для того, чтобы предъявить к выключателям и релейной защите какие-либо требования в отношении скорости отключения, было определено время предельного отключения КЗ tотк = 0,3 с. Т. е. время, в течение которого ротор достигает значение предельного угла отключения.
Расчет устойчивости динамического перехода
После вывода в ремонт цепи с двухфазным КЗ на землю, рассмотренным в предыдущем разделе, на оставшейся в работе цепи ВЛ происходит однофазное КЗ, которое ликвидируется отключением поврежденной фазы. С некоторой выдержкой времени происходит успешное повторное включение этой фазы и схема возвращается в исходное состояние. Необходимо исследовать станцию "А" на динамическую устойчивость в этих условиях. Для нахождения соотношения площадей ускорения и возможного торможения определим сопротивление связи для каждого из режимов, переходную ЭДС и построим характеристики электромагнитной мощности.
Известен интервал времени, по истечении которого с момента КЗ отключается поврежденная фаза, и время паузы ОАПВ:
![]()
Ремонтный (исходный) режим
Схема данного режима совпадает со схемой послеаварийного режима по условиям предыдущего раздела (см. рис. 16), т.к. одна из цепей линии выведена в ремонт, сопротивления остальных элементов в симметричном режиме не меняют своего значения. Поэтому значение сопротивления связи примем из предыдущего раздела:
![]()
Значение переходной ЭДС необходимо пересчитать с учетом имеющегося сопротивления связи по формуле, использованной в первом разделе задания:

Считаем ЭДС постоянной во всех режимах и равной переходной.
Тогда характеристика электромагнитной мощности определится как:

Проверка по исходному режиму:
Аварийный режим (однофазное кз)
На расстоянии LК от шин станции "А" на одной из цепей линии происходит однофазное КЗ (К(1)). В этом случае схема замещения представляет собой схему замещения ремонтного (исходного) режима, в которой между точкой КЗ и землей подключен шунт, составленный из последовательно соединенных суммарных сопротивлений схем обратной и нулевой последовательности (рис. 19). Расчет сопротивления связи в этом случае аналогичен соответствующим выкладкам во втором разделе задания и приведен здесь в сокращенном виде. Величины, расчет которых не приведен подробно, принимаются из предыдущего раздела.
Р ис.
19. Схема замещения одномашинной системы
в аварийном режиме.
ис.
19. Схема замещения одномашинной системы
в аварийном режиме.

Рис. 20. Схема замещения обратной последовательности.
В схеме замещения нулевой последовательности отсутствует сопротивление взаимоиндукции между цепями линии из-за отсутствия тока во второй цепи линии:
Рис. 21. Схема замещения нулевой последовательности.

Определим сопротивление шунта в схеме, эквивалентной токам прямой последовательности, и рассчитаем сопротивление связи в аварийном режиме:
![]()

 Тогда
характеристика электромагнитной
мощности определится как:
Тогда
характеристика электромагнитной
мощности определится как:

Послеаварийный (неполнофазный) режим
При отключении поврежденной фазы в схеме электропередачи возникает продольная несимметрия (L(1)). Для ее учета в схеме замещения данного режима, эквивалентной токам прямой последовательности, по месту разрыва фазы включается добавочное сопротивление, составленное из параллельно соединенных суммарных сопротивлений схем обратной и нулевой последовательности данного режима (рис. 22). Поскольку элементы схемы соединены последовательно, то равносильно подключить добавочное сопротивление между полным XЛ и XТ4, избегая дробления сопротивления ВЛ на составляющие X'Л и X''Л.
Рис. 22. Схема
замещения послеаварийного (неполнофазного)
режима.
Добавочное сопротивление в схеме, эквивалентной токам прямой последовательности:

Для определения XΔ(н) рассчитаем суммарные сопротивления схем обратной и нулевой последовательностей. Аналогично замечанию для схемы, эквивалентной токам прямой последовательности, расположение напряжения обратной и нулевой последовательностей в соответствующих схемах замещения не играет роли из-за последовательного соединения элементов.
 В
схеме замещения обратной последовательности
отсутствуют ЭДС источников, в месте
разрыва помещено напряжение обратной
последовательности, и сопротивление
эквивалентного генератора изменено на
сопротивление токам обратной
последовательности (рис. 23).
В
схеме замещения обратной последовательности
отсутствуют ЭДС источников, в месте
разрыва помещено напряжение обратной
последовательности, и сопротивление
эквивалентного генератора изменено на
сопротивление токам обратной
последовательности (рис. 23).
Рис. 23. Схема замещения обратной последовательности при продольной несимметрии.
Тогда суммарное сопротивление схемы обратной последовательности запишется как:
![]()
В схеме замещения нулевой последовательности отсутствуют ЭДС источников и сопротивления за обмоткой эквивалентного трансформатора, соединенной в треугольник, в месте разрыва помещено напряжение нулевой последовательности, сопротивление цепи ЛЭП пересчитано с учетом влияния грозозащитного троса (рис. 24).
 Рис.
24. Схема замещения нулевой последовательности
при продольной несимметрии.
Рис.
24. Схема замещения нулевой последовательности
при продольной несимметрии.
Тогда суммарное сопротивление схемы нулевой последовательности запишется как:
![]()
Зная суммарные сопротивления схем обратной и нулевой последовательностей можно определить добавочное сопротивление и, в соответствии со схемой рис. 22, рассчитать сопротивление связи в послеаварийном (неполнофазном) режиме:
 Тогда
характеристика электромагнитной
мощности определится как:
Тогда
характеристика электромагнитной
мощности определится как:

Рис.25. Угловые характеристики мощности генератора для нормального, аварийного и послеаварийного режимов.
Расчет углов коммутации
Расчет углов коммутации ведется с использованием характеристик электромагнитных мощностей, изображённых выше на рис. 25.
Для данного динамического перехода имеем три угла коммутации и три момента времени коммутации, начинающих свой отсчет от нуля. Первый угол δ0, при котором в момент КЗ (т. е. при моменте времени t0 = 0) происходит переход работы генераторов с характеристики ремонтного (исходного) режима (I) на характеристику аварийного режима (II). Этот угол известен и определен при расчете переходной ЭДС как угол электропередачи в исходном режиме:
δ0 = 40,070.
Второй и третий углы коммутации соответствуют моментам времени отключения КЗ (tот = t0 + ΔtКЗ = 0,2с) и успешного АПВ поврежденной фазы (tАПВ = t0 + ΔtКЗ + ΔtАПВ = 0,6с). Эти углы определяются из зависимости δ(t), рассчитываемой методом последовательных интервалов по характеристикам аварийного и послеаварийного (неполнофазного) режимов.
Согласно метода весь процесс движения роторов генераторов во времени разбиваем на ряд равных промежутков Δt = 0,05с и проводим расчет по характеристике аварийного режима аналогично соответствующему расчету в предыдущем разделе задания. Причем величина коэффициента, имитирующего ускорение роторов, заимствуется из предыдущего раздела задания и выполняется до момента времени tот (см. таблицу 4).
В момент времени tот происходит переход с характеристики аварийного режима на характеристику послеаварийного (неполнофазного) режима. Это произойдёт на пятом интервале.
Дальнейший расчет ведется без изменений и также внесен в таблицу 4.
Таблица 4. Расчет углов коммутации.
|
|
|
|
t, сек |
град |
№ инт |
Р, о.е. |
град |
град |
0 |
40,07 |
1 |
0,139928 |
0,580772 |
40,65077 |
0,05 |
40,65077 |
2 |
0,135464 |
0,562242 |
41,21301 |
0,1 |
41,21301 |
3 |
0,131179 |
0,544457 |
41,75747 |
0,15 |
41,75747 |
4 |
0,127064 |
0,52738 |
42,28485 |
0,2 |
42,28485 |
5 |
0,155071 |
1,814621 |
44,09947 |
0,25 |
44,09947 |
6 |
0,109766 |
2,72579 |
46,82526 |
0,3 |
46,82526 |
7 |
0,090482 |
3,476879 |
50,30214 |
0,35 |
50,30214 |
8 |
0,067273 |
4,035315 |
54,33746 |
0,4 |
54,33746 |
9 |
0,042395 |
4,387238 |
58,72469 |
0,45 |
58,72469 |
10 |
0,017993 |
4,536602 |
63,2613 |
0,5 |
63,2613 |
11 |
-0,00419 |
4,501795 |
67,76309 |
0,55 |
67,76309 |
12 |
-0,02301 |
4,310769 |
72,07386 |
0,6 |
72,07386 |
13 |
-0,03794 |
3,995825 |
76,06968 |
0,65 |
76,06968 |
14 |
-0,049 |
3,589071 |
79,65875 |
0,7 |
79,65875 |
Тогда по таблице 6 для заданных моментов коммутации получим углы:
δ0 = 40,070 при t0 = 0с;
δот.кз. = 42,280 при tот = 0,2с;
δАПВ = 72,070 при tАПВ = 0,6с.
После АПВ поврежденной фазы движение роторов генераторов происходит по характеристике нормального режима. Поэтому максимальный угол с точки зрения динамической устойчивости, обусловленный пересечением характеристики с мощностью турбины (после его прохождения роторы снова начнут ускоряться), найдется из выражения:
![]()
Определение площадок ускорения и возможного торможения
По известным углам коммутации с использованием графиков на рис. 25 можно определить площадки ускорения (на рис. 25 выделены вертикальной штриховкой) и возможного торможения (на рис. 25 выделены горизонтальной штриховкой).
Условием успешного динамического перехода является:
![]() .
.
Определим площадки
ускорений
![]()


![]()
Определим площадку возможного торможения:

Таким образом, получим:
![]() - динамический
переход успешен.
- динамический
переход успешен.
Выводы:
В данном разделе была исследована динамическая устойчивость одномашинной системы при наличии АПВ.
На рис. 25. приведены угловые характеристики мощности генератора станции А для ремонтного (исходного), аварийного (однофазное КЗ) и послеаварийного (неполнофазного) режимов.
В
точке а
мощности турбины и генератора
уравновешивают друг друга. Даная точка
соответствует исходному (ремонтному)
режиму работы одномашинной системы (
,
![]() ).
На оставшейся в работе ВЛ происходит
однофазное КЗ (поперечная несимметрия).
В связи с изменением параметров схемы
происходит переход с одной характеристики
мощности на другую
.
Т. к. вследствие инерции ротора угол
мгновенно измениться не может, то
отдаваемая генераторами мощность
уменьшается до значения, соответствующего
точке b
при том же угле
.
Мощность турбины остается при этом
остается неизменной и равной
.
).
На оставшейся в работе ВЛ происходит
однофазное КЗ (поперечная несимметрия).
В связи с изменением параметров схемы
происходит переход с одной характеристики
мощности на другую
.
Т. к. вследствие инерции ротора угол
мгновенно измениться не может, то
отдаваемая генераторами мощность
уменьшается до значения, соответствующего
точке b
при том же угле
.
Мощность турбины остается при этом
остается неизменной и равной
.
В результате на валу машины возникает избыточный момент, обусловленный избытком мощности. Под влиянием этого момента ротор генератора начинает ускоряться. Рабочая точка начинает движение вверх по кривой , соответствующей аварийному режиму, до точки с. Формируется первая площадка ускорения.
В точке с происходит отключение поврежденной фазы δот.кз. = 42,280. Далее вследствие инерции ротора происходит уменьшение отдаваемой генераторами мощности до значения, соответствующего точке d при том же угле δот.кз. Рабочая точка переходит на кривую . Т. к. характеристика послеаварийного режима лежит ниже характеристики турбогенератора, то на ротор генератора продолжает действовать ускоряющий избыточный момент. Ротор продолжает ускоряться, двигаясь по . Формируется вторая площадка ускорения.
Через
время t
= 0,4 с – пауза АПВ (происходит деионизация
и выключатель возвращается в исходное
состояние), в точке е
происходит успешное автоматическое
повторное включение (АПВ) δАПВ
= 72,070.
Отключенная фаза вводится в эксплуатацию.
Рабочая точка переходит на характеристику
исходного режима
![]() .
В результате отдаваемая генераторами
мощность значительно повышается. Теперь
отдаваемая мощность становиться больше
мощности турбины, избыточный момент
меняет свой знак, ротор начинает
тормозиться, однако, вследствие большой
инерционности ротор генератора продолжает
движение по кривой исходного режима.
Формируется площадка торможения.
.
В результате отдаваемая генераторами
мощность значительно повышается. Теперь
отдаваемая мощность становиться больше
мощности турбины, избыточный момент
меняет свой знак, ротор начинает
тормозиться, однако, вследствие большой
инерционности ротор генератора продолжает
движение по кривой исходного режима.
Формируется площадка торможения.
В рассматриваемом случае площадка возможного торможения оказывается больше суммы площадок ускорений. Динамический переход успешен. Следовательно, достигнув на исходной кривой некоторой точки, в которой запас избыточной кинетической энергии ротора иссякнет, движение ротора прекратиться. Однако, так как в этой точке имеется избыточный тормозящий момент, начнется относительное движение ротора в обратном направлении. После нескольких колебаний с постепенно затухающей амплитудой относительное движение ротора прекратиться и его положение будет определяться точкой, соответствующей установившемуся режиму на исходной характеристике мощности.
В случае неуспешного АПВ, ротор генератора продолжит ускорение по кривой послеаварийного режима и, пройдя критическую точку, которой соответствует δкр = 139,93, выпадет из синхронизма, произойдет развал системы.
Обоснование мероприятий по повышению статической устойчивости одномашинной системы
1. Изменение параметров элементов.
Для повышения статической устойчивости генератор не должен иметь зоны нечувствительности. Регулирование должно осуществляться не только по отклонению напряжения, но и по производной этой величины.
Сопротивление
линии и её номинальное напряжение
оказывают существенное влияние на
статическую устойчивость. Это наглядно
демонстрирует следующая формула
![]() .
Очевидно, что при увеличении номинального
напряжения линии или уменьшении её
сопротивления
.
Очевидно, что при увеличении номинального
напряжения линии или уменьшении её
сопротивления
![]() ,
будет наблюдаться уменьшение
,
будет наблюдаться уменьшение
![]() ,
что в свою очередь приведет к уменьшению
сопротивления связи. Это приведет к
увеличению максимального значения
угловой характеристики генератора
(график поднимается), а, следовательно,
и к повышению статической устойчивости.
,
что в свою очередь приведет к уменьшению
сопротивления связи. Это приведет к
увеличению максимального значения
угловой характеристики генератора
(график поднимается), а, следовательно,
и к повышению статической устойчивости.
Также снижение сопротивления линии достигается при расщеплении фазных проводов.
Другим методом является включение в рассечку линии устройств продольной компенсации (УПК).
2. Введение аварийного резерва при выпадении генератора из синхронизма либо отключение мощной электропередачи. Ачр.
3. Регулирование турбин. Однако данное мероприятие эффективно для газовых турбин.
Самым легко осуществимым способом улучшения статической устойчивости является включение устройств продольной компенсации в рассечку линии.
Установка устройств продольной компенсации в цепях генераторов.
Выполним расчет по установке устройств продольной компенсации при увеличении предела передаваемой мощности на 45%. Схему сети при этом позаимствуем из первого раздела задания.
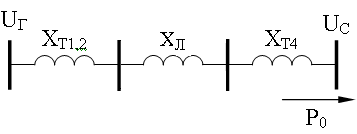
Рис. 26. Схема замещения одномашинной системы.
Сопротивление связи этой системы:
![]()
Найдем вектор напряжения на шинах генератора станции А.

Определим предел передаваемой мощности.
![]() .
.
Увеличим предел передаваемой мощности на 45%.
![]() .
.
При изменении
![]() на
на
![]() ,
изменяется
,
изменяется
![]() на
на
![]() и
и
![]() на
на
![]() .
.
Тогда
![]() и
и

Решив получившееся
уравнение, получим
![]() .
.
Определим
:
![]() .
.
Получаем, что для повышения предела передаваемой мощности на 45% необходимо снизить Хсв с 0,941 о.е. до 0,596 о.е.
Включение в рассечку линии устройств продольной компенсации (упк)
Определяем сопротивление УПК:
![]()
Определим максимальное значение передаваемой мощности после установки УПК:
![]()
![]() .
.
В качестве улучшения пропускной способности ЛЭП и повышения статической устойчивости системы можно либо в начале либо в конце линии подключить нагрузку, представляемую ёмкостью. Рассмотрим два случая:
1. Ёмкостный отбор подключен в начале линии.
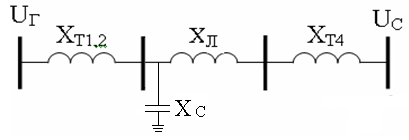
Рис. 27. Схема замещения одномашинной системы при подключении УПК в начале линии.

Определяем величину сопротивления УПК в именованных единицах:

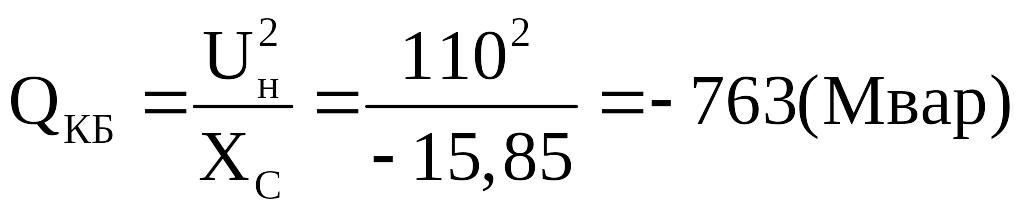
Определяем мощность конденсаторной батареи:
Определяем максимум передаваемой мощности:

2. Ёмкостный отбор подключен в конце линии.
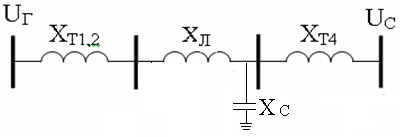
Рис. 28. Схема замещения одномашинной системы при подключении УПК в конце линии.

Определяем величину сопротивления УПК в именованных единицах:

Определяем мощность конденсаторной батареи:
Определяем максимум передаваемой мощности:

Выводы:
Таким образом, в данном разделе был повышен предел передаваемой мощности на 45%, путем включения УПК в рассечку начала и конца линии. УПК позволяет снизить сопротивление связи, что приводит к повышению предела передаваемой мощности станции.
Заключение
Цели и задачи, поставленные в начале выполнения данного курсового проекта, достигнуты. Произведен анализ полученных результатов. На основании анализа сделаны соответствующие выводы, приведенные в каждой главе курсового проекта.