

Занятие №1 Тема: «Разработка структурной схемы сау по математической модели»
Цель: изучение объекта исследования - системы угловой стабилизации (СУС) упругого КА, разработка ее структурной схемы по математическому описанию, знакомство с пакетом Vissim и приобретение начальных навыков работы с ним.
Первоначальным этапом исследовании любой САУ с помощью Vissim является построение структурной схемы по ее математическому описанию. Объектом данного исследования является система угловой стабилизации космического аппарата.
Назначение и состав СУС
Система угловой стабилизации предназначена для долговременного поддержания заданной ориентации КА в пространстве. Процесс стабилизации можно считать удовлетворительным, если выполняются следующие условия:
- обеспечивается асимптотическая устойчивость нулевого значения вектора состояния объекта, включающего параметры ориентации и угловую скорость;
- при малых начальных отклонениях обеспечивать достаточно быструю сходимость вектора состояния к нулевому значению.
Минимальный состав СУС включает:
- объект управления КА, представимый как абсолютно жесткое центральное ядро с присоединенными к нему упругими элементами (панели солнечных батарей, антенны, штанги и др.) (рис.1);
- датчик угла, по информации которого определяется угловое отклонение аппарата от заданного положения и его угловая скорость;
- формирующее устройство, которое по информации о векторе состояния вырабатывает управляющий сигнал;
- исполнительные устройства (реактивные двигатели ориентации, инерционные маховики, гиродины).
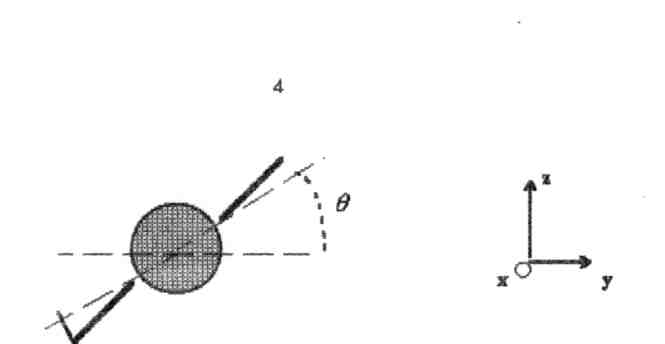
Рис 1. Объект управления
Будем рассматривать задачу одноосной стабилизации относительно продольной оси аппарата Ох. В этом случае динамические уравнения КА имеют вид
 (1)
(1)
 (2)
(2)
Где
 - осевой момент инерции КА,
- осевой момент инерции КА,
 -
коэффициенты взаимовлияния твердого
ядра и упругих элементов,
-
коэффициенты взаимовлияния твердого
ядра и упругих элементов,
 - соответственно
коэффициент демпфирования и частота
первого тона колебаний.
- соответственно
коэффициент демпфирования и частота
первого тона колебаний.
Все указанные параметры задаются таблично (табл.1).
 - переменные,
соответствующие углу поворота КА
относительно заданного положения и
величине "смещения" упругого
элемента относительно недеформированного
состояния. Измеряются соответственно
в радианах и метрах;
- переменные,
соответствующие углу поворота КА
относительно заданного положения и
величине "смещения" упругого
элемента относительно недеформированного
состояния. Измеряются соответственно
в радианах и метрах;
 - возмущающий и
управляющий моменты, приложенные к
аппарату.
- возмущающий и
управляющий моменты, приложенные к
аппарату.
Уравнение (1) отвечает вращению КА в пространстве, уравнение (2) -относительной динамике упругих элементов. Вместе они составляют описание объекта управления.
Приведенные уравнения наглядно отражают физическую природу рассматриваемого динамического процесса, поэтому в дальнейшем уравнения (1), (2) будем называть физической моделью. Действительно, левые части уравнений содержат соответственно угловое и линейное ускорения ядра и элемента, а правые части - моменты и силы;
 -
момент, действующий на ядро со стороны
упругого элемента;
-
момент, действующий на ядро со стороны
упругого элемента;
 - сила, действующая
на упругий элемент со стороны ядра.
- сила, действующая
на упругий элемент со стороны ядра.
Слагаемые
 и
и
 в
уравнении (2) обусловлены упругими
свойствами элемента и определяют
колебательный характер динамического
процесса.
в
уравнении (2) обусловлены упругими
свойствами элемента и определяют
колебательный характер динамического
процесса.
Для
исследования путем численного
моделирования физическая модель в таком
виде не пригодна. Действительно, из
уравнения (1) мы можем определить значение
переменной
 в момент времени
в момент времени
 ,
т.е.
,
т.е.

а
 - из второго уравнения
- из второго уравнения

что
невозможно, поскольку
 в данный момент еще не определено. Этого
можно избежать искусственным введением
во второе уравнение запаздывания, вместо
использовав
в данный момент еще не определено. Этого
можно избежать искусственным введением
во второе уравнение запаздывания, вместо
использовав
 .
Такой способ не совсем корректен,
поскольку полученная при этом дискретная
модель процесса структурно не адекватна
порождаемой непрерывной модели (в
непрерывную модель как бы добавляется
звено запаздывания). В ряде случаев
такой переход не ведет к существенному
искажению динамики процесса и является
допустимым. Однако для рассматриваемой
системы наличие запаздывания в контуре
управления может привести не только к
ухудшению качества системы, но даже к
потере устойчивости, в чем мы убедимся
в одной из лабораторных работ. Поэтому
мы поступим иначе. Путем эквивалентных
математических преобразований приведем
уравнения (1), (2) к другому виду. Рассматривая
их как систему, после исключения из
первого уравнения слагаемого, содержащего
.
Такой способ не совсем корректен,
поскольку полученная при этом дискретная
модель процесса структурно не адекватна
порождаемой непрерывной модели (в
непрерывную модель как бы добавляется
звено запаздывания). В ряде случаев
такой переход не ведет к существенному
искажению динамики процесса и является
допустимым. Однако для рассматриваемой
системы наличие запаздывания в контуре
управления может привести не только к
ухудшению качества системы, но даже к
потере устойчивости, в чем мы убедимся
в одной из лабораторных работ. Поэтому
мы поступим иначе. Путем эквивалентных
математических преобразований приведем
уравнения (1), (2) к другому виду. Рассматривая
их как систему, после исключения из
первого уравнения слагаемого, содержащего
 ,
получим
,
получим
 (3)
(3)
Уравнение (3) совместно с уравнением (2) и составляют преобразованную математическую модель вращения упругого КА.
Из
уравнения (3) передаточная функция от
 к
к
 равна
равна
 .
Из уравнения (2) получим передаточную
функцию от
к
.
Из уравнения (2) получим передаточную
функцию от
к
 .
.
Такой системе соответствует следующая структурная схема:

Рис.2. Структурная схема объекта управления
Перейдем к формированию управления. На борту управляющий сигнал вычисляется бортовым вычислителем. По алгоритму, разработанному еще на Земле, с учетом информации, поступающей с датчиков, вычисляется величина управляющего момента, требуемая в данный момент для угловой стабилизации аппарата.
Управление построим по принципу обратной связи.
Управляющий момент будем формировать в соответствии с законом:

в
котором
 - величина запаздывания, обусловленная
временем прохождения информационною
сигнала в контуре управления (будем
пригашать ее равной 0.1 сек.);
- величина запаздывания, обусловленная
временем прохождения информационною
сигнала в контуре управления (будем
пригашать ее равной 0.1 сек.);
 -
так называемые коэффициент регулятора,
являющиеся настраиваемыми параметрами
СУС. Их выбирают такими, чтобы САУ была
устойчивой и ее функционирование
отвечало требуемым оценкам качества.
-
так называемые коэффициент регулятора,
являющиеся настраиваемыми параметрами
СУС. Их выбирают такими, чтобы САУ была
устойчивой и ее функционирование
отвечало требуемым оценкам качества.
Такой
принцип формирования управления
называется линейным ПД -регулятором
(в закон управления входят пропорциональная
и дифференциальная составляющие
переменной
 )
.
)
.
Будем
считать, что датчики информации
обеспечивают абсолютно точное измерение
текущих значений переменных
 и
и
 .
В этом случае СУС можно представить в
виде следующей замкнутой схемы:
.
В этом случае СУС можно представить в
виде следующей замкнутой схемы:

Рис.3. Структурная схема СУС с ПД-ретулятором
На этом разработку структурной схемы можно считать законченной.
ЗАДАНИЕ:
Входящие в схему элементы сопоставить с типовыми блоками Vissim.
Для исходных данных своего варианта (см. таблицу в приложении) вычислить коэффициенты типовых блоков Vissim, из которых будет набрана структурная схема.
Набрать структурную схему. Для проверки работоспособности и адекватности модели в блоках-интегратор задавать не нулевые начальные условия.
Полученную схему и результаты вывести в отчет.
КОНТРОЛЬНЫЕ ВОПРОСЫ:
Назначение и состав СУС КА. Каков физический смысл входящих в математическую модель элементов.
Что такое регулятор, ПД-регулятор?
Из каких блоков состоит структурная схема СУС КА.
Основные этапы моделирования.