

Лабораторная работа № 7
Исследование асинхронного электродвигателя
с короткозамкнутым ротором
Цель работы – изучение конструкции асинхронного двигателя с короткозамкнутым ротором, экспериментальное получение рабочих характеристик двигателя, анализ экспериментальных рабочих характеристик.
1. Теоретические пояснения
Для преобразования электрической энергии в механическую в различных силовых установках применяют, главным образом, трехфазные асинхронные двигатели с короткозамкнутым ротором.
Принцип действия асинхронного двигателя основан на явлении взаимодействия вращающего магнитного поля, создаваемого обмоткой статора, с токами роторной обмотки, в результате чего создаётся вращающий момент.
Для оценки свойств электрической машины и пригодности ее для работы в заданных условиях необходимо иметь рабочие характеристики машины. Для асинхронного двигателя применяются два основных метода опытного определения рабочих характеристик: непосредственный и косвенный. Непосредственный метод получения рабочих характеристик путем изменения момента нагрузки на валу применяется обычно для двигателей малой мощности.
В данной лабораторной работе используется косвенный метод.
Устройство и основные элементы конструкции
Основными частями машины являются статор и ротор. Их сердечники собираются из листов электротехнической стали (рис. 7.1), которые до сборки обычно покрываются с обеих сторон специальным лаком. Тем самым предотвращается образование больших вихревых токов в стали сердечников.
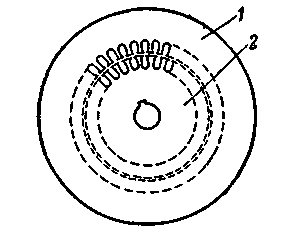
Рис. 7.1. Листы сердечников статора (1) и ротора (2).
На рис. 7.1 показаны листы, из которых собираются статор и ротор машин небольшой и средней мощностей. Они обычно штампуются при помощи штампа, позволяющего одним ударом получить необходимую форму листа со всеми отверстиями. Отверстия на внутренней окружности листов статора и на внешней окружности листов ротора после сборки их образуют пазы статора и ротора, в которые закладываются проводники обмоток.
На рис. 7.2 показан короткозамкнутый двигатель в разобранном виде.
Сердечник статора помещается в корпусе, который служит его внешней частью. Сердечник ротора укрепляется непосредственно на валу двигателя или на втулке (в форме крестовины), надетой на вал двигателя.
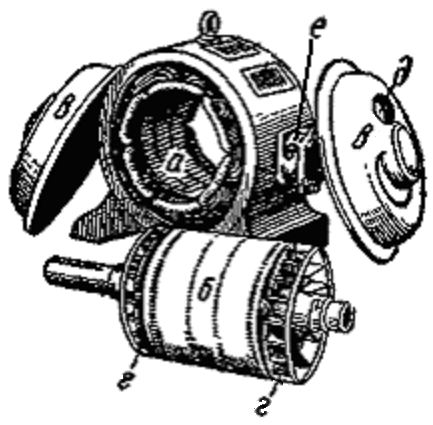
Рис. 7.2. Асинхронный двигатель короткозамкнутым ротором в разобранном виде. а — статор; 6 — ротор; в — подшипниковые щиты; г — вентилятор; д — отверстия для входа и выхода охлаждающего воздуха; е — клеммник для подключения питания.
Вал вращается в подшипниках, укрепленных в боковых щитах, называемых подшипниковыми щитами. Машины мощностью до 500—600 кВт (иногда и выше) снабжаются подшипниками качения (шариковыми и роликовыми), при большей мощности — подшипниками скольжения. При внешнем диаметре сердечника статора свыше 1 м обычно применяют стояковые подшипники (рис. 7.3).
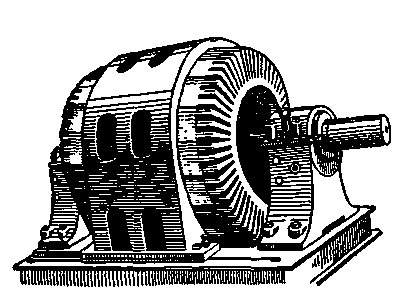
Рис. 7.3. Асинхронный двигатель большой мощности со стояковыми подшипниками.
Подшипниковые щиты прикрепляются к корпусу статора при помощи болтов или шпилек. Щиты и корпус статора обычно выполняются литыми из чугуна. Для малых машин их часто выполняют литыми из сплава с большим содержанием алюминия, что уменьшает вес машины.
Обмотки статора
Обмотки и сердечники статора и ротора являются основными частями электрической машины. Они и создают в ней условия для электромагнитных процессов, протекающих при преобразовании электрической энергии в механическую или при обратном преобразовании.
Максимальная электродвижущая сила (ЭДС), наведенная в проводнике, равна:
![]() (1)
(1)
где Вм – максимальная индукция в воздушном зазоре, В·с/см2;
l – активная длина проводника, см;
![]() – скорость поля
относительно проводника, см/с.
– скорость поля
относительно проводника, см/с.
Частота наведенной в проводнике ЭДС при двух полюсах (одна пара полюсов p = 1), равна [Гц]:
![]() ,
,
где
![]() n
– частота вращения, об/мин.
n
– частота вращения, об/мин.
При числе полюсов, равном 2р, частота будет в р (p = 2) раз больше:
![]() ,
(2)
,
(2)
так как в этом случае за один оборот ротора мимо проводника пройдут р северных и р южных полюсов.
Если вместо одного витка взять катушку, состоящую из w витков, то ЭДС в катушке будет в w раз больше, чем в одном витке:
![]() .
(3)
.
(3)
Обмотка статора обычно состоит из катушек, равномерно сдвинутых одна относительно другой по окружности статора. Стороны катушек закладываются в пазы. В паз закладывают или одну катушечную сторону, или две катушечные стороны одну над другой. В соответствии с этим различают однослойные и двухслойные обмотки.
Обмотки короткозамкнутых роторов
Такие обмотки, как правило, выполняются в виде беличьих клеток, состоящих из стержней и замыкающих их на торцах колец (рис. 7.4).
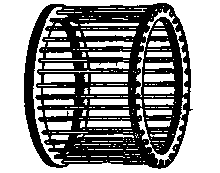
Рис. 7.4. Короткозамкнутая обмотка ротора в виде беличьей клетки.
Для машин до 100 кBт они обычно выполняются путем заливки расплавленного алюминия в пазы ротора. При этом одновременно отливаются и короткозамыкающие торцовые кольца вместе с вентиляционными крыльями (рис. 7.5). Пазы ротора показаны на рис. 7.6.

Рис. 7.5. Алюминиевая короткозамкнутая обмотка ротора.
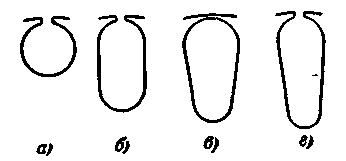
Рис. 7.6. Пазы ротора.
Принцип действия асинхронного двигателя
Для лучшего понимания принципа действия асинхронного двигателя вначале примем, что его вращающееся поле создается путем вращения двух полюсов (постоянных магнитов или электромагнитов), как показано на рис. 7.7.
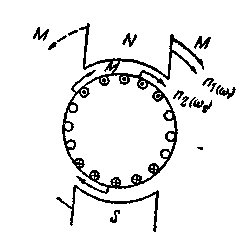
Рис. 7.7. К пояснению принципа действия асинхронного двигателя.
В проводниках замкнутой обмотки ротора при этом будут наводиться токи. Их направления указаны на рис. 7. Они найдены по правилу правой руки, позволяющему определить направление наведенного тока в проводнике, перемещающемся относительно поля. Пользуясь правилом левой руки, найдем направления электромагнитных сил, действующих на ротор и заставляющих его вращаться.
Ротор двигателя будет вращаться в направлении вращения поля. Его частота вращения n2 (об/мин), будет меньше частоты вращения поля n1, так как только в этом случае возможны наведение токов в обмотке ротора и возникновение электромагнитных сил и вращающего момента.
Частота вращения поля n1 называется синхронной частотой вращения.
Скорость поля относительно ротора (n1 – n2) называется частотой скольжения, а отношение этой частоты к частоте поля, обозначаемое через s, называется скольжением.
![]()
![]() .
(4)
.
(4)
Обозначим через М вращающий момент, который нужно приложить к полюсам (рис. 7), чтобы вращать их c частотой n1 об/мин, или с угловой частотой рад/с,
![]() .
(5)
.
(5)
Тогда мощность, необходимая для вращения полюсов,
![]() .
(6)
.
(6)
На ротор и полюсы действуют одинаковые электромагнитные силы (действие равно противодействию). Они создают одинаковые вращающие моменты, а так как момент, действующий на полюсы (на рис. 7 показан пунктирной стрелкой), равен М, то и на ротор действует момент М. Следовательно, механическая мощность, развиваемая ротором,
![]() ,
(7)
,
(7)
где угловая частота ротора, рад/с,
![]() .
(8)
.
(8)
При работе машины
двигателем
![]() ,
так как ω2
< ω1.
,
так как ω2
< ω1.
Можно считать, что
разность мощностей Рэм
и
![]() равна
только электрическим потерям в обмотке
ротора, имеющей m2
фаз при токе в фазе I2
и ее активном
сопротивлении r2,
так как потерями в стали ротора можно
пренебречь:
равна
только электрическим потерям в обмотке
ротора, имеющей m2
фаз при токе в фазе I2
и ее активном
сопротивлении r2,
так как потерями в стали ротора можно
пренебречь:
![]() (9)
(9)
Мощность Рэм передается вращающимся полем ротору. Она называется электромагнитной мощностью или мощностью вращающегося поля.
В реальной асинхронной машине, работающей двигателем, электромагнитная мощность Рэм равна первичной мощности Р1, подведенной к статору, за вычетом РЭ1 электрических потерь в обмотке статора
![]() ,
(10)
,
(10)
(m1– число фаз; I1 – ток в фазе обмотки статора, r1; – ее активное сопротивление) и потерь в стали статора PС1, т. е.
![]() .
(11)
.
(11)
Механическая
мощность на валу двигателя P2
(полезная мощность) меньше механической
мощности
![]() ,
развиваемой ротором. Чтобы получить
Р2,
нужно вычесть из
механические
потери Pмех
на трение в подшипниках и вращающихся
частей о воздух, потери РСД
в зубцах статора и ротора, вызываемые
пульсациями поля в них, и небольшие
добавочные потери Pдоб, возникающие при
нагрузке и вызываемые полями рассеяния
статора и ротора:
,
развиваемой ротором. Чтобы получить
Р2,
нужно вычесть из
механические
потери Pмех
на трение в подшипниках и вращающихся
частей о воздух, потери РСД
в зубцах статора и ротора, вызываемые
пульсациями поля в них, и небольшие
добавочные потери Pдоб, возникающие при
нагрузке и вызываемые полями рассеяния
статора и ротора:
![]() .
(12)
.
(12)
Энергетическая диаграмма асинхронного двигателя
Наглядное представление о распределении мощностей в асинхронном двигателе дает его энергетическая диаграмма, приведенная на рис. 7.8. Она соответствует (11) и (12).
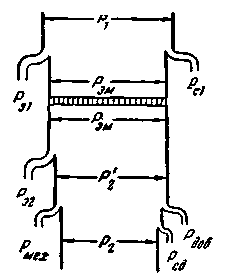
Рис. 7.8. Энергетическая диаграмма асинхронного двигателя.
Из написанных ранее соотношений (6), (7) следует:
![]() ,
,
так как
![]() .
.
Асинхронные
двигатели выполняются таким образом,
чтобы их скольжение было невелико. Оно
для нормальных двигателей мощностью
от 1 до 1 000 кВт при их номинальной нагрузке
составляет приблизительно 6![]() 1%.
1%.
Частота вращения поля (синхронная частота) определяется, как указывалось, по формуле
![]() ,
(13)
,
(13)
где f1 — частота тока статора;
р — число пар полюсов его обмотки.
При стандартной частоте f = 50 Гц синхронные частоты вращения для различных чисел полюсов имеют значения, приведенные в табл. 7.1.
Таблица 7.1
p |
2 |
4 |
6 |
8 |
10 |
12 |
n1 |
3000 |
1500 |
1000 |
750 |
600 |
500 |
Частота вращения ротора согласно, об/мин,
![]() .
.
Номинальная частота вращения n2Н, получающаяся при номинальной нагрузке на валу, указывается на щитке двигателя. Она в обычных случаях позволяет определить синхронную частоту вращения, число полюсов двигателя и его номинальное скольжение sН.
Например, на щитке двигателя, предназначенного для работы при частоте тока f1 = 50 Гц, указана частота вращения n2Н = 730 об/мин. Ближайшая синхронная частота вращения равна 750 об/мин (табл. 1), чему соответствует число пар полюсов р = 8.
Скольжение
![]() .
.
Пуск короткозамкнутых двигателей
Характерной особенностью пуска короткозамкнутых двигателей является большой пусковой ток, превышающий номинальный в 5 . . .8 раз.
Такие двигатели выполняются, как отмечалось, с роторной обмоткой в виде беличьей клетки.
Короткозамкнутые двигатели обычно пускаются в ход путем непосредственного включения их в сеть.
Применяют также с целью уменьшения пусковых токов запуск двигателей, по схеме звезда, с последующим переводом в основной режим включения по схеме треугольник.
Регулирование скорости вращения
Асинхронные двигатели обычно применяются для электроприводов, которые работают с постоянной частотой вращения. Но иногда они применяются для регулируемых электроприводов. Рассмотрим возможные способы регулирования частоты вращения.
1. Частоту вращения асинхронного двигателя можно регулировать путем изменения напряжения U1 на зажимах статора. Однако такой способ регулирования при малом сопротивлении роторной цепи позволяет изменять частоту вращения лишь в очень небольших пределах.
2. В необходимых случаях плавное регулирование частоты вращения осуществляется путем изменения частоты f1, тока, подводимого к двигателю. При этом изменяется частота вращения поля , а, следовательно, и ротора.
Такой способ регулирования требует наличия отдельного генератора переменного тока с регулируемой частотой.
3. На практике применяется также способ ступенчатого изменения частоты вращения путем изменения числа пар полюсов обмотки статора. Соответствующее переключение обмотки производится сравнительно просто, если нужно увеличить или уменьшить число пар полюсов вдвое. В этом случае каждая фаза обмотки статора делится на две одинаковые части, которые можно включать последовательно или параллельно. При обмотке статора, переключаемой на различные числа пар полюсов, как правило, применяется короткозамкнутый ротор с беличьей клеткой.
Достоинством многоскоростного двигателя при применении его, например, для токарного станка является то, что при изменении момента нагрузки он работает на каждой ступени частоты вращения при незначительном ее изменении, как и обычный асинхронный двигатель. К недостаткам нужно отнести их увеличенные размеры по сравнению с нормальными двигателями и вследствие этого более высокую стоимость.
Механические характеристики n2 = f (M) многоскоростного двигателя, приведенные на рис. 7.9.
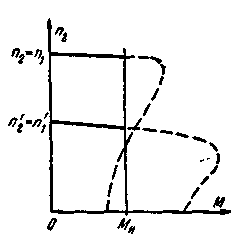
Рис. 7.9. Механические характеристики n2 = f (M) многоскоростного
двигателя для двух ступеней скорости.
4. Имеется группа асинхронных двигателей с фазным ротором. Для регулирования частоты вращения которых используется реостат в цепи ротора, имеющего обмотку, присоединенную к контактным кольцам (двигатели с фазным ротором см. лабораторную работу №8).
Увеличение активного сопротивления цепи ротора приводит к увеличению скольжения и, следовательно, к уменьшению частоты вращения двигателя.
5. На практике используется также реостатно-импульсный способ регулирования, при котором в цепь статора включаются дополнительные резисторы, которые в определенные моменты времени шунтируются управляемыми ключами.
Некоторые серии асинхронных машин
Основной серией трехфазных асинхронных двигателей массового применения является серия А. В нее входят двигатели мощностью от 0,6 до 125 кВт. На базе серии А разработаны различные модификации: двигатели с повышенным пусковым моментом, с повышенной способностью к перегрузке по моменту, с повышенным скольжением, с контактными кольцами и др. На рис. 7.10 представлен двигатель серии А.

Рис. 7.10. Двигатель серии А Рис. 7.11. Двигатель серии АО.
с фланцем для крепления.
Все двигатели этой серии выполняются с короткозамкнутой алюминиевой клеткой на роторе. Общепринятой конструкцией для них является защищенная конструкция, при которой исключается попадание в машину капель воды, падающих сверху или под углом 45° к горизонтали. Двигатели серии А имеют корпус и подшипниковые щиты, выполненные из чугуна или при малых мощностях из алюминиевого сплава. В последнем случае они обозначаются как серия АЛ.
На рис. 7.11 представлен двигатель серии АО. Двигатели этой серии имеют закрытую конструкцию с обдувом внешней ребристой поверхности корпуса статора, который осуществляется при помощи вентилятора. Последний помещен на валу двигателя между внутренним щитом, закрывающим ротор двигателя, и внешним щитом с отверстиями для прохода воздуха. Малые двигатели закрытой конструкции с обдувом внешней поверхности корпуса статора делаются также с корпусом статора и щитами из алюминия. Они входят в серию АОЛ.
Рабочие характеристики асинхронного двигателя
Для полного выявления свойств двигателя служат его рабочие характеристики – так принято называть зависимости от полезной мощности Р2 двигателя на валу частоты вращения n, вращающего момента МВР, коэффициента мощности cosφ1 и КПД η.
Рабочие характеристики приведены на рис. 7.12.
Рабочие характеристики двигателей небольшой мощности могут быть найдены путем непосредственного измерения тока I1, мощности P1, частоты вращения n2 и момента на валу Мв при различных нагрузках двигателя. Нагрузка двигателя при этом осуществляется с помощью какого-либо тормоза, позволяющего измерить создаваемый им тормозящий момент Мв, кг·м.
При опыте непосредственной нагрузки напряжение U1 и частоту тока f1 устанавливают равными номинальным значениям U1Н и f1Н. По данным измерений рассчитывается мощность, Вт,
![]()
и коэффициенты:
![]() ;
;
![]() ;
;
![]() .
.
В лабораторной работе №7 тормозящий момент организуется генератором постоянного тока, включенным соосно с исследуемым двигателем. Расчетные формулы приведены в указаниях по обработке результатов эксперимента.
Анализ характеристик асинхронного двигателя
Полный набор характеристик асинхронного двигателя приведен на рис. 7.12.
1) Зависимость cosφ1 двигателя от нагрузки
Изменения cosφ1 обусловлены следующими соотношениями. Намагничивающий ток двигателя мало зависит от нагрузки, а главный магнитный поток машины
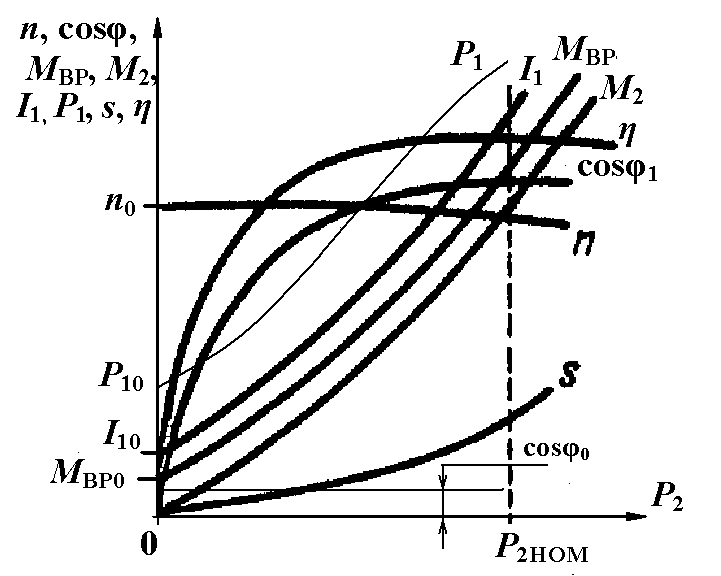
Рис 7.12. Характеристики асинхронного двигателя.
при возрастании нагрузки незначительно уменьшается. Но активный ток двигателя пропорционален его механической нагрузке. Таким образом, с увеличением нагрузки двигателя относительное значение реактивного тока быстро убывает и cosφ1 увеличивается. При холостом ходе двигателя его коэффициент мощности довольно низок – примерно 0,2. С увеличением нагрузки он быстро возрастает и достигает максимального значения (0,8-0,95) при нагрузке, близкой к номинальной. Таким образом, даже у полностью загруженного двигателя реактивный ток составляет 60—30% тока статора.
Неполная загруженность асинхронных двигателей – это одна из главных причин низкого cosφ1 промышленных предприятий. Естественным способом повышения cosφ1 является полная загрузка асинхронных двигателей.
2) Коэффициент полезного действия
КПД определяется отношением полезной мощности на валу Р2 к мощности Pl определяющей потребление двигателем энергии из сети:
η = Р2/Pl или η = (Р2/Pl )×100, % .
Мощность P1 равна сумме полезной мощности и мощности всех потерь в двигателе:
Pl = Р2 + PПОТ.
Мощность всех потерь в двигателе можно разделить на постоянную составляющую, практически не зависящую от нагрузки, и переменную составляющую, зависящую от нее.
Мощностью постоянных потерь в двигателе можно считать мощность потерь в сердечнике статора из-за гистерезиса и вихревых токов и мощность механических потерь, которая определяется экспериментально из опыта холостого хода двигателя.
Мощность переменных потерь в двигателе равна мощности потерь на нагревание проводов обмоток статора и ротора.
Максимального значения (65-95%) КПД достигает, если переменные потери равны постоянным. У большинства двигателей этот максимум КПД имеет место примерно при нагрузке, равной 75% номинальной, так как двигатели проектируются с учетом того обстоятельства, что далеко не всегда они полностью загружены.
3) Скольжение s
Режим работы трехфазной асинхронной машины определяется электромагнитным взаимодействием токов в обмотках статора и ротора.
Взаимодействие вращающегося магнитного поля, создаваемого токами в обмотках статора, с токами ротора вынуждает ротор вращаться по направлению вращения поля. Но чем быстрее вращается ротор, тем меньше индуктируемые в его обмотке ЭДС, а, следовательно, и токи. Если частота вращения поля n1, а частота вращения ротора n, то режим работы асинхронной машины можно характеризовать скольжением
s = (n1 – n)/ n1 или s = [(n1 – n)/ n1]×100, %.
В режиме двигателя (0 < s < 1) характеристика n = f(s) линейна (рис. 7.13).
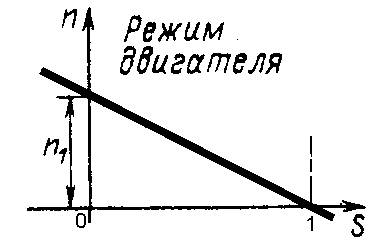
Рис. 7.13.
4) Скоростная характеристика
Зависимость n = f(Р2) – скоростная характеристика – мало отличается по форме от механической характеристики двигателя n(МВР). Она может быть названа жесткой (рис.1), при этом скольжение s = f(P2) = (n0 – n)/n0 .
5) Вращающий момент МВР
Вращающий момент МВР развиваемый двигателем, складывается из полезного момента М2 (преодоления нагрузки на валу двигателя) и момента холостого хода М0. Последний покрывает механические потери двигателя. Этот момент можно приближенно считать не зависящим от нагрузки двигателя. Полезный момент М2 = Р2/ωр; если бы скорость ωр была строго постоянна, то зависимость М2(Р2) была бы линейна, но скорость двигателя немного уменьшается с увеличением Р2, поэтому график зависимости МВР (Р2) немного отклоняется вверх. Соответственно график вращающего момента МВР (Р2), складывающегося из момента холостого хода и полезного момента, пересекает ось ординат в точке, соответствующей М0 , а затем он почти прямолинеен и лишь немного изгибается вверх.
Кривая полезного механического момента M2 будет проходить параллельно М2(Р2), но из нулевой точки.
6) Зависимость фазного тока от нагрузки
Зависимость фазного тока от нагрузки I1 = f(P2) аналогична зависимости для вращающего момента МВР (Р2).
Рекомендуемая литература для самостоятельной работы
Касаткин А.С. Электротехника. Учеб. для вузов / А.С. Касаткин, М.В. Немцов. – 7-е изд., стер. – М.: Высш., 2002.
Электротехника и электрооборудование строительных процессов: Учебник для вузов /А.В. Воробьев М.: Изд-во АСВ. 1995.
Данилов И.А., Иванов П.М. Общая электротехника с основами электроники: Учеб. пособие для студ. неэлектротехн. спец. средних спец. Учеб. заведений. – 4-е изд., стер. – М.: Высш. шк., 2000.
2. Описание лабораторного стенда
Схема установки для проведения исследований приведена на рис. 7.14.
Установка состоит исследуемого двигателя М1, питаемого от сети 380 В через трансформатор, генератора G/M, нагрузочных реостатов и приборов.
Перечень аппаратуры приведен в табл. 7.2
Описание электрической схемы соединений
М1 (102.1) – испытуемый асинхронный двигатель с короткозамкнутым ротором.
G1 (201.2) – источник синусоидального напряжения промышленной частоты 50 Гц.
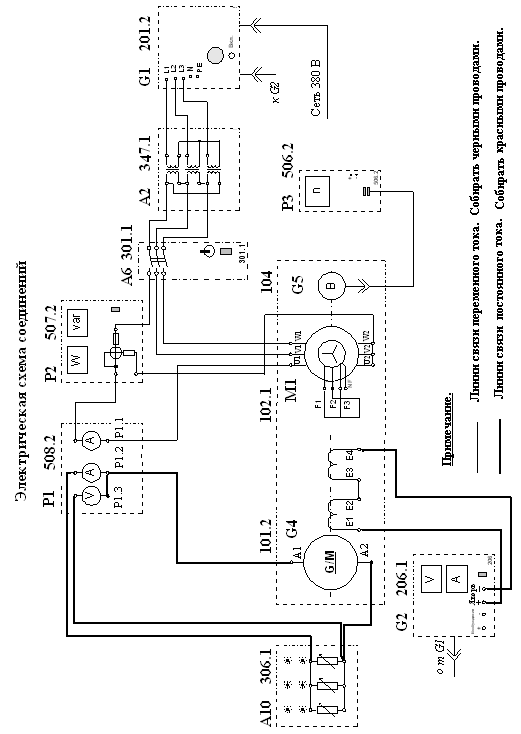

G2 (206.1) – источник питания двигателя постоянного тока. Используется для питания регулируемым напряжением обмотки возбуждения машины постоянного тока.
G4 (101.2) – машина постоянного тока, работающая в режиме генератора с независимым возбуждением и выступающая в качестве нагрузочной машины.
G5 (104) – преобразователь угловых перемещений генерирует импульсы, поступающие на вход указателя частоты вращения Р3 электромашинного агрегата.
Р3 (506.2) – указатель частоты вращения.
Перечень аппаратуры Таблица 7.2
Обознач. |
Наименование |
Тип |
Параметры |
|
G1 |
Трехфазный источник питания |
201.2 |
~ 400 В / 16 А |
|
G2 |
Источник питания двигателя постоянного тока |
206.1 |
0…250 В / 3 А (якорь) / 200 В / 1 А (возбуждение) |
|
G4 |
Машина постоянного тока, работающая в режиме генератора |
101.2 |
90 Вт / 220 В / 0,56 А (якорь) / 2×110 В / 0,25 А (возбуждение) |
|
G5 |
Преобразователь угловых перемещений |
104 |
6 вых. каналов / 2500 импульсов за оборот |
|
М1 |
Машина переменного тока |
102.1 |
100 Вт / ~ 230 В / 1500 мин |
|
А2 |
Трёхфазная трансформаторная группа |
347.1
|
380 ВА; 230 В/242,235, 230, 226, 220, 133, 127 В |
|
А6 |
Трехполюсный выключатель |
301.1 |
~ 400 В / 10 А |
|
А10 |
Активная нагрузка |
306.1 |
220 В / 30…50 Вт; |
|
Р1 |
Блок мультиметров |
508.2 |
3 мультиметра
0...10 А / 0…20 МОм |
|
Р2 |
Измеритель мощностей |
507.2 |
15; 60; 150; 300; 600 В / 0,05; 0,1; 0,2; 0,5 А. |
|
Р3 |
Указатель частоты вращения |
506.2 |
-2000…0…2000 мин1 |
|
Испытуемый асинхронный двигатель М1 получает питание через трехфазную трансформаторную группу А2 от трехфазного источника питания G1.
Активная нагрузка А10 (306.1) используется для нагрузки генератора G4.
С помощью мультиметров блока Р1 (508.2) контролируются ток статорной обмотки испытуемого двигателя М1 (Р1.1), ток (Р1.2) и напряжение (Р1.3) якорной обмотки генератора G4.
С помощью измерителя Р2 (507.2) контролируются активная и реактивная мощности, потребляемые испытуемым двигателем М1.