

7.2. Способ замены плоскостей проекций
Для определения положения точки в пространстве достаточно знать три координаты этой точки. На любой плоскости проекций определены только лишь пара координат. Для того, чтобы координат было три, необходимо ввести еще одну плоскость проекций на которой будет также пара координат точки. В сумме для двух плоскостей имеем четыре координаты, из которых одна будет зависимой от других координат. Таким образом, если количество плоскостей будет больше одной, то количество независимых координат будет только три. Минимальное количество плоскостей проекций, необходимое для построения точки в пространстве, будет две. Построение третьей проекции ранее рассматривалось в п. 3.3.
Вводя дополнительную плоскость, мы осуществляем преобразование системы координат, которое можно выразить следующей формулой:
хi = aijхj*,
где хi – координаты aij – направляющие косинусы между старой и новой системой координат.
* Использована запись по правилу Эйнштейна
– суммирование по повторяющимся
индексам.
Использована запись по правилу Эйнштейна
– суммирование по повторяющимся
индексам.
Для взаимно перпендикулярных осей координат aij – 0 или 1. Отсюда вытекает простота преобразования комплексного чертежа за счет требования перпендикулярности дополнительной плоскости.
Замену плоскостей проекций необходимо проводить перпендикулярно любой плоскости проекций. Это требование необходимо соблюдать для того, чтобы при построении дополнительной проекции расстояние от плоскости, к которой восстанавливается перпендикулярная плоскость, до проекции точки было бы таким же, как и на другой плоскости проекций. Если дополнительная плоскость проекций будет перпендикулярна фронтальной плоскости проекций, то координата Y будет одинаковой для фронтальной, горизонтальной и дополнительной проекций. Дополнительная плоскость, перпендикулярная горизонтальной плоскости проекции, будет иметь ту же координату Z, что и на фронтальной и профильной плоскостях проекций. Одинаковая координата X для фронтальной и горизонтальной плоскости будет у любой дополнительной плоскости, показанной перпендикулярно профильной плоскости проекций.
Пусть в системе плоскостей П1/П2 определены проекции точки А (А1 и А2), (рис. 7.1). Линию пересечения (ось x) плоскостей проекцией П1 и П2 назовем базой отсчета – П1/П2. Поместим дополнительную плоскость проекций П4 перпендикулярно горизонтальной плоскости проекций. Профильная плоскость проекций П3 не показана. Линию пересечения плоскостей проекций П1/П4 назовем новой базой отсчета. Так как дополнительная плоскость проекций перпендикулярна горизонтальной плоскости проекций, то расстояние от проекций точки до баз отсчета П1/П2 и П1/П4 одинаково, т. е. для обеих плоскостей общей будет координатная ось Z. Поэтому для нахождения проекции точки А на дополнительной плоскости проекций П4 необходимо отложить координату z (измерив z на фронтальной плоскости проекций П2) вдоль линии связи А1 – А4. На рис. 6.1 величины данных координат показаны синим цветом.
На рис. 7.2 приведен комплексный чертеж, соответствующий наглядному изображению на рис. 7.1. При решении задач способом преобразования комплексного чертежа основная и дополнительная базы выбираются произвольно (рис. 7.1), исходя из требований упрощения решения задачи. Тогда необходимым условием правильности решения задачи является перпендикулярность линий связи линиям пересечения плоскостей проекций – баз отсчета.
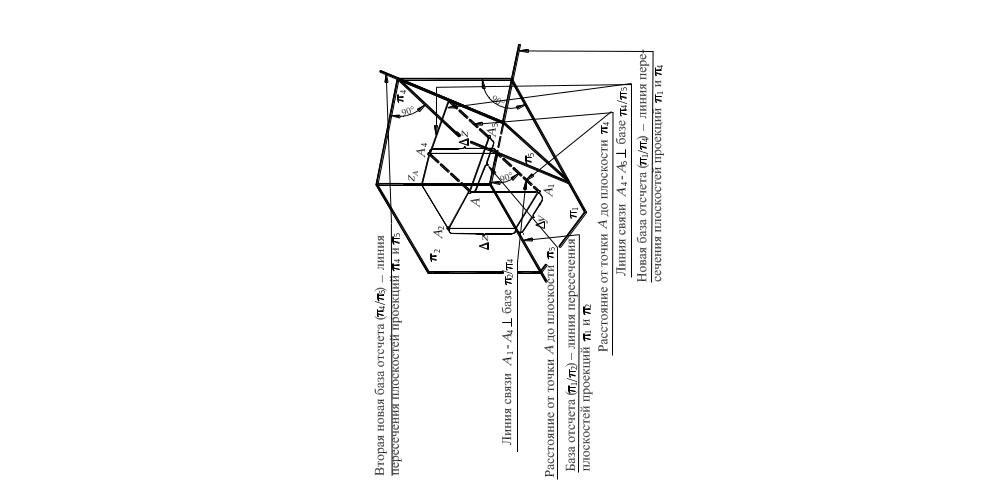
Дополнительная плоскость проекций проводится произвольно с обязательным условием ее перпендикулярности основной или дополнительной плоскости проекций. На рис. 7.3 показано наглядное изображение двойного преобразования: первого (перпендикулярно горизонтальной плоскости проекций 1 проведена плоскость 4); второго (перпендикулярно новой плоскости проведена вторая дополнительная плоскость проекций 5). Для первого преобразования общей координатой для плоскостей 2 и 4 будет координата вдоль оси z (перпендикулярной плоскости 1, а значит принадлежащей плоскости 4). Для второго преобразования общей координатой будет координата вдоль оси, перпендикулярной к плоскости 4, а значит, принадлежащей второй дополнительной плоскости проекций 5.
проекций, что обеспечивает равенство расстояний вдоль линий связи от проекций до баз отсчета.
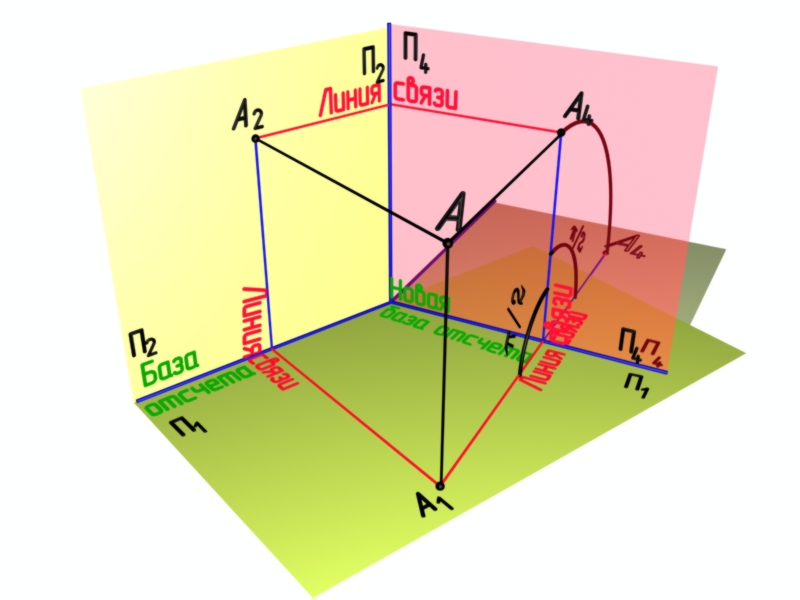
Рис. 7.1
Рис. 7.2
|
Рис. 7.3 |
Подобные преобразования будут справедливы, если построения проводить, начиная с профильной плоскости проекций. Построение дополнительной плоскости проекций 4 перпендикулярно (рис. 7.4) профильной плоскости проекций 3 обеспечивает равенство расстояний вдоль линий связи от проекций точки до соответствующих баз отсчета, а именно вдоль оси х.
Рис. 7.4
Пример 26
Задание: построить линию пересечения плоскостей (ΔАВС) и Σ(ΔEFD)
Решение. для определения линии пересечения плоскостей чертеж необходимо преобразовать таким образом, чтобы одна из заданных плоскостей стала проецирующей. На рис. 7.5 дополнительная плоскость 4 выбрана так, чтобы она была перпендикулярна плоскости проекций 2 и проекции А2В2 (АВ – отрезок фронтальной прямой уровня – на 4 проецируется в виде точек А4 и С4). Так как проекция треугольника АВС на плоскость 4 выглядит как проекция проецирующей плоскости, то проекция линии пересечения на дополнительную плоскость будет 1424. По построенной проекции находим фронтальную, а затем горизонтальную проекцию линии пересечения. Точка А выше, чем точка D (см. фронтальную проекцию), а значит, на горизонтальной проекции у плоскости W(DАВС) будет видна часть от вершины А до линии пересечения. На фронтальной проекции видна будет часть от линии пересечения до вершины С треугольника, так как точка С ближе, чем точка Е (см. рис. 7.5, горизонтальную проекцию).
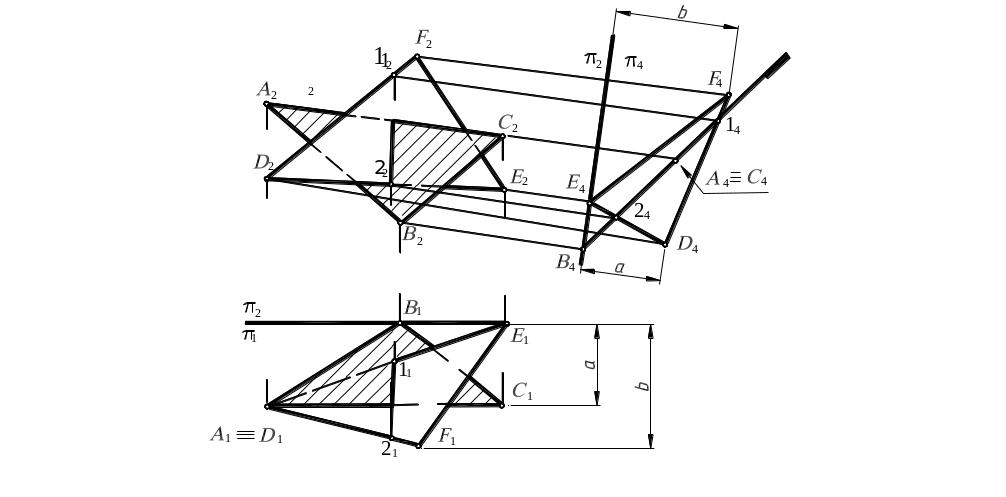
Рис. 7.5
Отметим, что для определения величины угла между плоскостями необходимо преобразовать чертеж таким образом, чтобы линия пересечения была перпендикулярна дополнительной плоскости проекций. Для этого первая дополнительная плоскость проекций должна занять параллельное положение относительно линии пересечения, а вторая – перпендикулярное.