

31.Системы на основе Linux
Для поддержки реального времени ОС Windows модифицируются по 3-м направлениям:
1) поддержка стандарта POSIX, касающ-ся ОСРВ- POSIX поддерж-ся ОС набазовом уровне. Это треб-ие к ОС общего назнчения. Элементы стандарта,связ-ые с поддержкой РВ в Windows поддерж-ся частично. В ОС не реализ-ся спец-ные механизмы планирования задач,мех-мы планирования задач, мех-мы работы с таймером и т.п.
2) поддержка специализир.оборуд-я,прогр.реализация поддержки в спец-ных интерфейсных связях с управляемыми объектами
3) реализация возможности приоритетного вытеснения ядра ОС(Preemption).ОС Linux, как все ОС общ.назначения не дает возм-ть запустить более приоритетную задачу,если в данный момент вып-ся ядро ОС.
Сущ-ют нес-ко способов реализ-ии (1),(3),в зав-ти от способа решения этих задач их мона разделить на 2 группы:
1)заново переписать всё ядро ОС(недостаток-большой объем работы)
2)написать отдельн.модуль(микроядро),отвечающий за диспетчеризацию и планирование задач.Необх-мо предусмотреть взаим-ие микроядра и основного ядра ОС.Сущ-ет специализир.версия ОС Linux, кот-я реализ-ет (2)
RT-LINUX- в данной ОС исп-ся спец-ное микроядро,отвечающ.за созд-ие и планирование задча, обеспеч-ие их взаимод-ия и диспетчеризацию.В ОС реализован простейший мех-м планирования с исп-ем приоритетов,взаим-ия м/у задачами осущ-ся ч/з очередь сообщений FIFO
Для орг-ции вып-ия ядра ОС ядру ОС присвоен самый низкий приоритет. В ядре ОС функции,отвеч. за запрещ-я и разреш-я переключения задач и прерываний замены на вызов соотв-х функций в микроядре.
32.Осрв на основе Windows nt
Windows NT может исп-ся в кач-ве ОСРВ по след-щим причинам:
1)поддержка многопропорц-ти и многозадачности
2)возможность реализ-ии механизма вытеснения ядра ОС
3)возможность разрешения и запрещения прерываний
4)прямой доступ к оборуд-ю, реализуемый ч/з систему драйверов
5)специальная схема приоритетов, реализ-щая в ОС
Недостатки Windows NT(в смысле орг-ции реального времени)
1)ядро ОС невозможно вытеснить более приоритет.задачей
2)при формировании запроса на прерывание схема назначения приоритетов, заложенная в ОС, присваивает всем задачам, обрабатывающим запросы на прерывание, одинаковые приоритеты.Т.о.задачи будут получать процессорное время в порядке их поступления в очередь задач FIFO
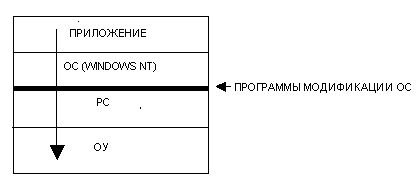
Для того, чтобы опр-ть режим работы жесткого РВ в ОС общего назначения-необходимо сформировать “прослойку” м/у аппарат.обеспеч.(РС) и ОС.При этом сама ОС становится зависимой от этой программ. “прослойки”
Soft-Ice-относится к отладчику прогр.обеспеч-я,позв.внедряться в “прослойку”
Прог-мы,раб-щие напрямую я процессором, работают в нулевом кольце защиты(привилегий) процессора.
1)Hyper Kernel представ.собой ядро, обесп-щее предсказуемое поведение ОС Windows NT(на уровне упр-я задачами и т.п.) Хар-ки сис-мы-разрешение таймера 1 мкс, миним.таймерный интервал-20мкс. Разработка РС ведется в Visual C/C++
2)LP RT-Technology- включ.3 комп-та:
a)интерфейсн.плата д/связи с управ-мым объектом
б)комплект разрабочика ПО(для Visual C++) с поддержкой Soft-Ice
в)програм.комплекс,обеспеч-щий совместное функцион-ие оболочки и Windows NT
3)Realtime ETS Kernel-выпускается в2-х версиях:1.По принципу Hyper Kernel 2.НастояшшаяОСРВ
4)Сomponent Integrator-предс.собой програм.пакет, модифицирующий ряд алгоритмов работы WindowsNT:
1компонент-поддержка рабоы без дисплея и клавиатуры , сокращение потребности в памяти,поддержка специализиров.интерфейсов.
2компонент-поддержка работы с таймерами
5)Windows RT