

3.2.1 Похибка по напрузі
Розглянемо похибку по напрузі:
![]()
Оскільки кут малий, то замість арифметичної різниці модулів векторів U1 і –U’2 можна взяти проекцію вектора АЕ на вісь –U’2. Таким чином, похибка визначається відрізком АF.
Кут між напругою на навантаженні U’2 і е.р.с. Е’2 складає декілька мінут, і ним можна знехтувати. Знайдемо проекції векторів I0r1, I0x1, (-I’2)(r1+r’2), (-I’2)(x1+x’2) на напрямок вектора –U’2 (на вертикальну вісь). Рівняння для похибки по напрузі прийме вигляд:
 (3-3)
(3-3)
Рівняння (3-3) показує, що похибка складається з двох частин. Перша визначається струмом холостого ходу, друга – струмом навантаження. Для того, щоб зменшити похибку по напрузі, знижують активний і реактивний опір обмоток.
Для отримання малого активного опору беруться малі густини струмів в обмотках (біля 0.3 А/мм2). Завдяки малій густині струму в обмотках ці трансформатори слабо завантажені в тепловому відношенні.
Для зниження індуктивного опору обмоток х1 і х2 зменшують відстань між первинною і вторинною обмотками.
При заданій первинній напрузі U1 намагнічувальний струм є практично постійним. В цьому випадку згідно (3-3) похибка лінійно зростає при збільшенні струму навантаження І’2. Оскільки в номінальному режимі напруга U’2 мало змінюється при зміні струму навантаження І’2, то вихідна потужність Р пропорційна цьому струму. Залежність похибки по напрузі від потужності навантаження для одного з трансформаторів показана на рис.3.4, а.
На похибку впливає коефіцієнт потужності навантаження cos2. При зменшенні cos2 похибка зростає.
П
Рисунок 3.4 –
Залежність похибок трансформатора
напруги від навантаження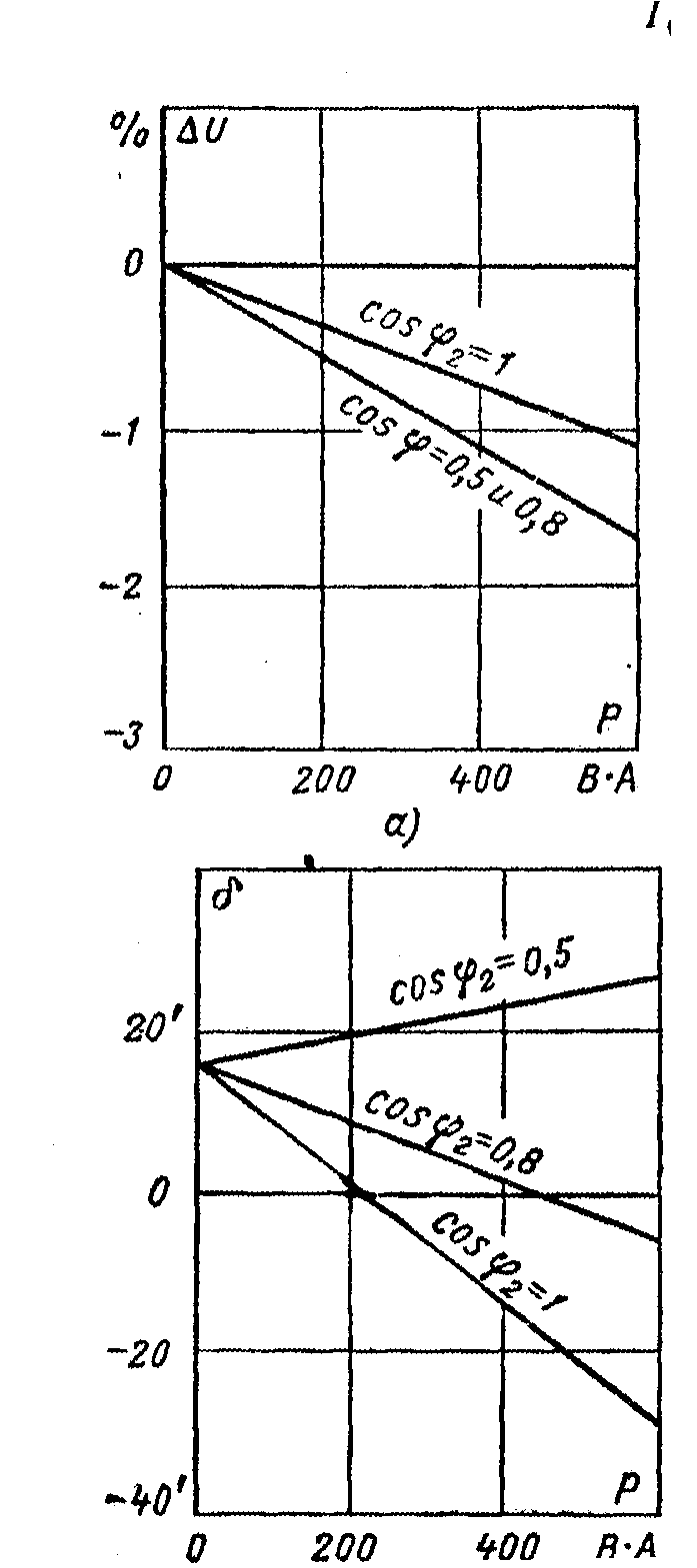
![]()
Тоді похибка знаходиться пропорційно дробу Н/Bm або обернено-пропорційно магнітній проникності а. Зазвичай робоча індукція в номінальному режимі вибирається в межах 1,0 – 1,1Т (матеріал осердя – сталь Э42 або Э310).
При зміні первинної напру-ги в межах від 0,5 до 1,1 магнітна проникність збільшується і по-хибка зменшується.
Слід відзначити, що похибка від струму холостого ходу мала порівняно з похибкою від струму навантаженя. Тому при вимірю-ванні напруги у вказаних межах похибка мало залежить від величини напруги живлення.
3.2.2 Кутова похибка
Кутова похибка визначається кутом між повернутою на 1800 вторинною напругою –U’2 і напругою U1. Враховуючи, що кут має дуже мале значення, то можна вважати, що ОЕ=ОF (рис.3.3).
Тоді
tg==EF/OЕ
або в кутових мінутах:
 (3-4)
(3-4)
Похибка по куту складається також з двох частин: похибки по струму холостого ходу і похибки по струму навантаження.
З рівняння (3-4) випливає, що реактивний опір обмоток вносить від’ємну кутову похибку, а активний – додатну. Залежність кутової похибки від потужності Р при різному коефіцієнті потужності приведена на рис.3.4, б.
В режимі холостого ходу кутова похибка додатна. При чисто активному навантаженні (cos2=1) з ростом потужності похибка змінює знак і стає від’ємною. При cos2=0,5 кутова похибка лінійно зростає разом з потужністю і залишається весь час додатною. Слід відмітити, що характер навантаження (cos2) спричиняє більший вплив на кутову похибку, ніж на похибку по напрузі.
Компенсацію похибки по напрузі можна легко отримати шляхом зменшення кількості витків первинної обмотки. Якщо зменшити число витків первинної обмотки, то коефіцієнт трансформації стає меншим від номінального і вторинна напруга зростає. При цьому ми вводимо додатну похибку, яка компенсує від’ємну. Зазвичай вводиться така корекція, що при холостому ході трансформатор має максимально допустиму для даного класу точності додатну похибку.
Результуюча похибка по напрузі при відмотуванні первинних витків визначається за виразом:
 (3-5)
(3-5)
На кутову похибку виткова корекція не впливає.
Кутову похибку в трифазних трансформаторах напруги можна скомпенсувати. В цьому випадку необхідна компенсація досягається шляхом застосування компенсуючих обмоток. При активному навантаженні вноситься додатна поправка. При індуктивному навантаженні застосовується інша схема з’єднань, яка дає від’ємну поправку.