

6.4 Режимы движения цапфы в подшипнике
Для определения полного давления подшипника на цапфу ротора необходимо статическое давление геометрически сложить с динамическим:
Qa=Qc1a+Qd1a и Qв = Qc 1b+Qd 1b
В зависимости от значений Q d и Q c возможны три случая, которые приводятся ниже для подшипника.
Первый случай. Qс A > Qd A
Вектор Qc a статического давления остается неизменным, а
вектор Qd a динамического давления вращается вместе с ротором с той
же угловой скоростью w, что и ротор. Поэтому вектор QA , представляющий их геометрическую сумму, будет поворачиваться вокруг точки р в пределах некоторого угла а(альфа) то в одну, то другую сторону (рис. 4.6а). При этом QA изменяется как по направлению, так и по величине в пределах от Qmin=Qca – Qda до Qmax= Qca + Qda

Учитывая трение скольжения при движении цапфы в подшипниках, силу Qa следует направить по касательной к кругу трения. Тогда вектор QA будет совершать колебательное движение
в пределах угла а, а точка К касания цапфы с подшипником - по определенной дуге. Однако эти рассуждения справедливы для случая, когда отсутствует зазор между цапфой и подшипником. В действительности же диаметр цапфы всегда меньше внутреннего диаметра подшипника на величину 8 (рис. 4.66), поэтому ггёрёмещрние точки К влечет за собою и перемещение центра О цапфы. При этом точка К будет двигаться по дуге К}КК2, а точка О - по дуге радиуса 8/2.
Причем угол бетта который стягивается этими дугами, отличается от угла а. Этот режим называется режимом колебательного движения, или первым режимом. При таком движении подшипник изнашивается в зоне соприкосновения с цапфой, то есть с одной стороны, а цапфа — кругом но неравномерно. Неравномерный износ будет тем меньше, чем меньше динамическое давление.
Второй случай. Qca=Qaд
В этом случае величина силы QA изменяется в пределах 0<=Qa<=2Qaд
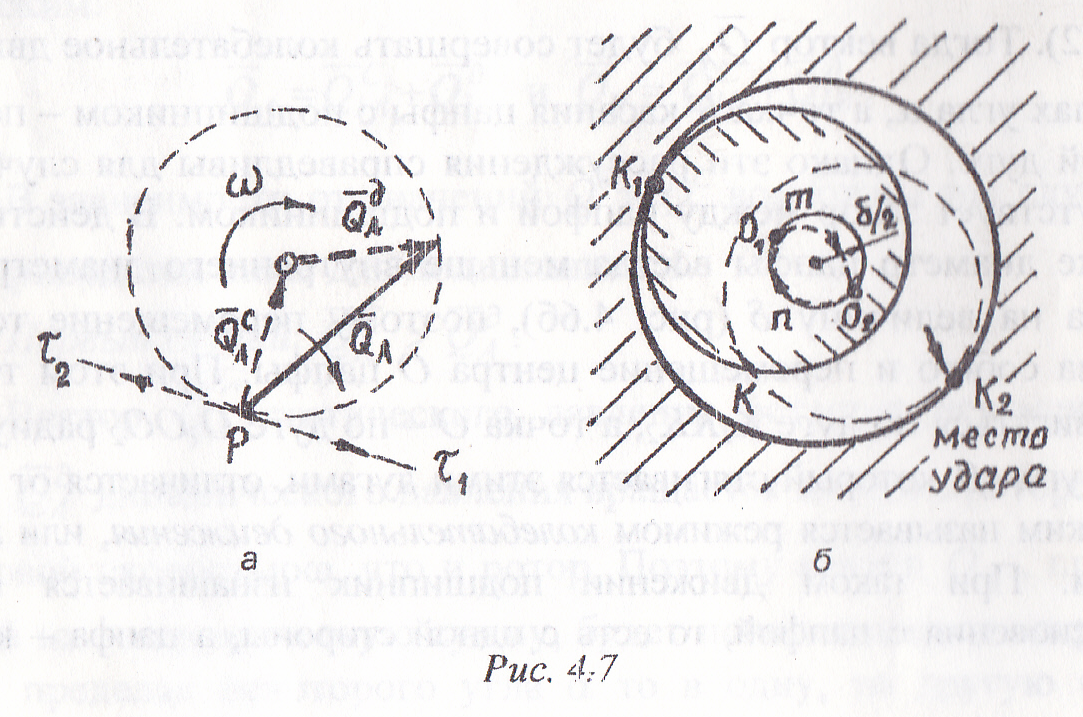
Допускается, что вектор QA вращается по часовой стрелке вокруг точки р (рис. 4.7а), а его направление совпадает с направлением р t1. Когда численное значение Qa окажется равным нулю (QA = 0), произойдет мгновенное изменение направления на прямо противоположное рt2. При этом точка К приложения этой силы также должна мгновенно переместиться с некоторой точки Kj в положение К2. Однако наличие зазора приводит к тому, что из-за движения цапфы перемещение точки К из положения Kj в положение К2 не происходит мгновенно. В течение некоторого времени центр цапфы движется по кривой О1ГПО2 (рис.4.7б), причем цапфа не касается подшипника. Происходит удар цапфы о подшипник и центр цапфы становится неподвижным. После этого точка К начинает двигаться по дуге K2KKh а центр цапфы по 02n01 радиуса б/2. При каждом обороте ротора удар цапфы о подшипник повторится, что приводит к быстрому разрушению подшипникового узла и частей механизма. Такой режим движения называется режимом ударного движения, или вторым режимом.
Третий случай. Q dа>Qс A
В этом случае QA, изменяясь по величине от QAmin =Qд A – Qс A
до QA max = Qд A + Qс A вращается вокруг точки р (рис. 4.8а) в том же направлении, что и ротор.
Следовательно, в этом же направлении двигается их точка контакта. Цапфа под действием этой силы постоянно прижата к подшипнику одной стороной, и при движении ее центр будет воспроизводить окружность радиуса круга трения скольжения (рис. 4.86). При этом цапфа изнашивается с одной стороны, с той, которой она прижата к подшипнику, а подшипник изнашивается кругом, но неравномерно.
Этот режим называется режимом одностороннего износа цапфы, или третьим режимом.
Характеризуя режимы с точки зрения износа цапфы и подшипника, следует отметить, что самым предпочтительным режимом является первый. Работа подшипников в этом режиме достигается путем установки противовесов или балансировкой роторов.
