

42. Сколько флагов на уровне пользовательской программы требуется для организации взаимоисключающего доступа двух задач к разделяемым данным?
Перед тем как начать работу с разделяемым ресурсом поток должен захватить мьютекс. Единовременно владеть мьютексом может только один поток. Поэтому, если потоку удается захватить мьютекс, это означает, что мьютекс был свободен. Если мьютекс занят, система переводит поток в режим ожидания до тех пор, пока мьютекс не освободится. Захватив мьютекс, поток начинает работать с ресурсом, имея гарантию на то, что, сколько бы потоков не пыталось захватить тот же самый мьютекс, все они будут ждать его освобождения. Закончив работу с ресурсом, поток освобождает мьютекс. Даже если в этот момент мьютекс ожидает несколько потоков, захватить его сможет только один поток (какой именно - решает планировщик). Таким образом, мьютекс гарантирует, что только один поток получает монопольный доступ к ресурсу.
Два флага занят либо свободен.
43. Какие недостатки у способа регулирования доступа к критическим данным двух задач с помощью одной переменной-флага?
Пусть
имеются два (или более) циклических
процесса, в которых есть абстракт-ные
критические секции, то есть каждый из
процессов состоит из двух частей:
некоторого критического интервала и
оставшейся части кода, в которой нет
рабо¬ты с общими (критическими)
переменными. Пусть эти два процесса
асинхронно разделяют во времени
единственный процессор либо выполняются
на отдель¬ных процессорах, каждый из
которых имеет доступ к некоторой общей
области памяти,
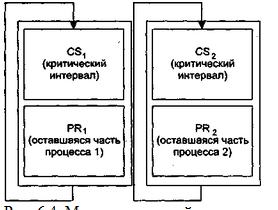 с
которой и работают критические секции.
Проиллюстрируем эту ситуацию с помощью
рис. 6.4.
с
которой и работают критические секции.
Проиллюстрируем эту ситуацию с помощью
рис. 6.4.
Проблема кажется легко решаемой, если потребовать, чтобы процессы ПР1 и ПР2 входили в свои критические интервалы попеременно. Для этого одна общая переменная может хранить указатель того, чья очередь войти в критическую секцию.
Однако если бы часть программы PR1 была намного длиннее, чем программа PR2, или если бы процесс ПР1 был заблокирован в секции PR1, или если бы процессор для ПР2 был с большим быстродействием, то процесс ПР2 вскоре вынужден был бы ждать (и, может быть, чрезвычайно долго) входа в свою критическую секцию CS2, хотя процесс ПР1 и был бы вне CS1. То есть при таком решении один процесс вне своей критической секции может помешать вхождению другого в свою критическую секцию.
44. Какие средства организации взаимоисключающего доступа задач к разделяемым данным можно использовать в программах?
1.He использовать алгоритмы планирования задач с вытеснением. Это решение, правда, не всегда приемлемо.
2. Использовать специальный сервер ресурса, то есть задачу ответственную за упорядочивание доступа к ресурсу. В этом случае запрос на изменение значения глобальных данных посылается этому серверу в виде сообщения. Аналогичный подход применим и для физических устройств. Так, например, задача может послать данные на печать в виде сообщения, направленного к серверу принтера.
3. Запретить прерывания на время доступа к разделяемым данным. Кардинальное решение, которое, впрочем, не приветствуется в системах реального времени.
4. Использовать для упорядочивания доступа к глобальным данным семафоры. Наиболее часто применяемое решение, которое, впрочем, может привести в некоторых случаях к «инверсии приоритетов».
Семафор — это как раз то средство, которое часто используется для синхронизации доступа к ресурсам. В простейшем случае семафор представляет собой байтовую переменную, принимающую значение 0 или 1. Задача, перед тем как использовать ресурс, захватывает семафор, после чего остальные задачи, желающие использовать тот же ресурс, должны ждать, пока семафор (ресурс) освободится.
Проникнувшись сознанием того, насколько опасно изменять глобальные переменные в условиях, когда все вокруг так и норовят друг друга вытеснить, наверно, не удивительно, что участки кода программ, где происходит обращение к разделяемым ресурсам, называются критическими секциями.
Так как процессы обычно не имеют доступа к данным друг друга, а ресурсы физических устройств, как правило, управляются специальными задачами-серверами (драйверами), наиболее типична ситуация, когда «гонки» за доступ к глобальным переменным устраивают различные потоки, исполняемые в рамках одного программного модуля. Для того чтобы гарантировать, что критическая секция кода исполняется в каждый момент времени только одним потоком, используют механизм взаимоисключающего доступа, или попросту мутексов (Mutual Exclusion Locks, Mutex). Практически мутекс представляет собой разновидность семафора, который сигнализирует другим потокам, что критическая секция кода кем-то уже выполняется.