

4. Принципы суперпозиций и относительность движение мт.
Принцип суперпозиции движения. Всякое движение можно разложить на сколь угодно е количество независимых друг от друга движений.
Если точка участвует в нескольких движениях, их можно свести к одному, независимых (означает, что каждое из движений мы можем изучать, забыв про другое) друг от друга.
Из этого принципа следует правило сложения скоростей:
1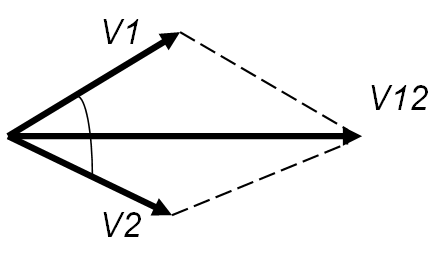 .
.


2.

С огласно
принципам относительности может
осуществлять переход от одной системы
координат к другой.
огласно
принципам относительности может
осуществлять переход от одной системы
координат к другой.
1. Принцип относительности Галилея
Пусть
имеем две инерциальные системы отсчета,
одну из которых мы будем условно
считать неподвижной (система К
с
осями декартавых координат х,
у, z).
Другая
же система (система К’
с
осями декартовых координат х’,
у’, z')
пусть
равномерно и прямолинейно движется
со скоростью
 относительно
первой (рис.3.1).
относительно
первой (рис.3.1).
Преобразования
Галилея связывают координаты и время
события в указанных двух инерциальных
системах отсчета. Примем
для простоты, что оси х
и
х'
совпадают,
а скорость относительного
движения
 направлена
вдоль оси х
или
х'.
На
рисунке для большей наглядности
системы координат К
и
К'
показаны
отдельно.
направлена
вдоль оси х
или
х'.
На
рисунке для большей наглядности
системы координат К
и
К'
показаны
отдельно.
Пусть по часам наблюдателя в системе К прошло некоторое время t. В классической физике считалось само собой разумеющимся, что такое же время зарегистрирует и наблюдатель в системе К’ т.е. t' = t. (3.1)
Так как предполагается, что в момент t = 0, начала координат обеих систем совпадали, то за время t система K' переместится на расстояние, равное vt. Пусть теперь в момент t’ в системе К' в точке с координатами х’, у' и z' произошло событие — включение электрической лампочки. Координаты лампочки, измеренные в момент t = t’ наблюдателем в системе К, имеют значения х, у, z.
Легко видеть, что y' = y (3.2), z' = z, (3.3) х' = х - vt. (3.4)
Соотношения (3.1) - (3.4) называются преобразованиями Галилея. Дифференцируя формулы (3.2) - (3.4) по времени, получим классический закон сложения скоростей
U’y’= Uy; U’z’= Uz; U’x’= Ux-v
Здесь
U’x’;
U’y’;
U’z’
–
это
проекции вектора относительной
скорости
тела
 (по отношению к системе отсчета К’),
а
Ux,
Uy,
Uz
- это проекции вектора абсолютной
скорости
(по отношению к системе отсчета К’),
а
Ux,
Uy,
Uz
- это проекции вектора абсолютной
скорости
 (по
отношению к системе отсчета К).
В
векторной форме закон сложения скоростей
имеет вид
(по
отношению к системе отсчета К).
В
векторной форме закон сложения скоростей
имеет вид
 ,
Обратимся
теперь к механическому принципу
относительности Галилея. Согласно этому
принципу все законы механики должны
иметь одинаковый вид во всех инерциальных
системах отсчета. Другими словами,
уравнения, описывающие законы механики,
должны быть инвариантными по отношению
к преобразованиям Галилея.
,
Обратимся
теперь к механическому принципу
относительности Галилея. Согласно этому
принципу все законы механики должны
иметь одинаковый вид во всех инерциальных
системах отсчета. Другими словами,
уравнения, описывающие законы механики,
должны быть инвариантными по отношению
к преобразованиям Галилея.
Принцип относительности Галилея можно сформулировать и по-другому: при одинаковых условиях все механические явления во всех инерциальных системах отсчета протекают совершенно одинаково.
5. Работа и энергия и их эквивалентность.
Пусть
тело (м.т.) движется по некоторой
произвольной криволинейной траектории.
На него все время действует сила,
величина и направление которой могут
быть разными в разных точках траектории.
Но если весь путь разбить на бесконечно
малые участки, то во всех точках
данного участка можно считать силу
постоянной и по величине, и по направлению.
Определим работу силы на таком участке
следующим образом ,
где а
— угол между направлениями элементарного
перемещения dr
и
силы F
.
Так
как
,
где а
— угол между направлениями элементарного
перемещения dr
и
силы F
.
Так
как
 ,
то формулу для элементарной работы
можно записать и в таком виде
dA=FdsСosа=Fsds.
Суммируя
элементарные работы, можно найти работу
на любом протяжении траектории.
,
то формулу для элементарной работы
можно записать и в таком виде
dA=FdsСosа=Fsds.
Суммируя
элементарные работы, можно найти работу
на любом протяжении траектории.
Потенциальная энергия. Пусть в пространстве существует стационарное силовое поле, например, поле тяготения, создаваемое некоторым телом, которое будем считать точечным. Точечное тело — это такое тело, линейный размер которого весьма мал по сравнении с расстоянием от него до рассматриваемой точки поля. Примем, что тело является заодно и телом отсчета. Если в некоторую точку М поля поместить другое тело (м.т.), то оно испытывает силу, зависящую только от расстояния r до источника, т.е. F - F(r). Работа, совершаемая в стационарном силовом поле при перемещении тела из некоторой точки M1 в точку М2 очевидно равна
 и
в общем случае зависит от формы и длины
пути от M1
до
М2.
Мы будем иметь дело только с потенциальным
полем. Это такое стационарное силовое
поле, в котором упомянутая работа не
зависит ни от формы, ни от длины пути от
M1
до
М2,
а зависит только от координат этих
точек. Отсюда вытекает, что работа в
потенциальном поле или, другими словами,
работа, совершаемая консервативными
силами по замкнутому пути равна нулю.
Сформулированное свойство потенциальных
полей математически означает
следующее. Подинтегральное выражение
в (3.5) равно взятому со знаком минус
полному дифференциалу функции WП(r),
которая
называется потенциальной энергией
системы: dA
= -dWП(r).
и
в общем случае зависит от формы и длины
пути от M1
до
М2.
Мы будем иметь дело только с потенциальным
полем. Это такое стационарное силовое
поле, в котором упомянутая работа не
зависит ни от формы, ни от длины пути от
M1
до
М2,
а зависит только от координат этих
точек. Отсюда вытекает, что работа в
потенциальном поле или, другими словами,
работа, совершаемая консервативными
силами по замкнутому пути равна нулю.
Сформулированное свойство потенциальных
полей математически означает
следующее. Подинтегральное выражение
в (3.5) равно взятому со знаком минус
полному дифференциалу функции WП(r),
которая
называется потенциальной энергией
системы: dA
= -dWП(r).
Таким образом, потенциальная энергия— это физическая величина, элементарное изменение которой равно (взятой со знаком минус) элементарной работе, совершаемой силами поля. Интегрируя последнее соотношение от точки М1 до точки М2, получим уравнение, связывающее конечную работу сил поля с разностью потенциальных энергий в указанных точках A12=WП1-WП2 =-(WП2 –WПl).
WП=mgh – потенциальная энергия (энергия положения тела)
Отсюда вытекает, что физический смысл имеет лишь разность потенциальных энергий. Условимся считать, что когда тело находится на бесконечности, то его потенциальная энергия равна нулю. Тогда под WП(r) следует понимать работу, совершаемую силами поля при перемещении тела из точки М в бесконечность.
Выразим теперь работу А12 через разность кинетических энергий тела в точках М1 и М2.
Выберем
какое-либо элементарное перемещение
dr
на
криволинейном пути от точки М1
до
точки М2.
Спроектируем теперь силу и ускорение
во втором законе Ньютона F
= та
на
направление dr.
Принимая во внимание, что величина
тангенциального ускорения аt=aCosа=dv/dt,
где
а
— угол между векторами
 и
и
 ,
получим Fcosa
= m(dv/dt).
После
умножения левой части этого уравнения
на ds,
а правой на vdt=ds
формула для элементарной работы примет
вид
,
получим Fcosa
= m(dv/dt).
После
умножения левой части этого уравнения
на ds,
а правой на vdt=ds
формула для элементарной работы примет
вид
 .
Пусть
в начальной точке пути скорость тела
равна v1,
а в конечной точке пути его скорость
стала равной v2.
Тогда после интегрирования получим
.
Пусть
в начальной точке пути скорость тела
равна v1,
а в конечной точке пути его скорость
стала равной v2.
Тогда после интегрирования получим
 (3.7)
Отсюда
вытекает формула, определяющая
кинетическую энергию тела
(3.7)
Отсюда
вытекает формула, определяющая
кинетическую энергию тела

Назовем полной механической энергией величину Е = WK + WП.