

2)Равновесие тела при наличии трения качения
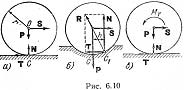
Рассмотрим цилиндр (каток), покоящийся на горизонтальной плоскости, когда на него действует горизонтальная активная сила S; кроме нее, действуют сила тяжести Р, а также нормальная реакция N и сила трения Т (рис. 6.10, а). При достаточно малом модуле силы S цилиндр остается в покое. Но этот факт нельзя объяснить, если удовлетвориться введением сил, изображенных на рис. 6.10, а. Согласно этой схеме равновесие невозможно, так как главный момент всех сил, действующих на цилиндр МСz= –Sr, отличен от нуля, и одно из условий равновесия не выполняется. Причина этого несоответствия состоит в том, что мы представляем это тело абсолютно твердым и предполагаем касание цилиндра с поверхностью происходящим по образующей. Для устранения отмеченного несоответствия теории с опытом необходимо отказаться от гипотезы абсолютно твердого тела и учесть, что в действительности цилиндр и плоскость вблизи точки С деформируются и существует некоторая площадь соприкосновения конечной ширины. Вследствие этого в ее правой части цилиндр прижимается сильнее, чем в левой, и полная реакция R приложена правее точки С (см. точку С1 на рис. 6.10, б). Полученная схема действующих сил статически удовлетворительна, так как момент пары (S,Т) может уравновеситься моментом пары (N,Р). В отличие от первой схемы (рис. 6.10, а), к цилиндру приложена пара сил с моментом МT=Nh.(6.11). Этот момент называется моментом трения качения. h=Sr/, где h-расстояние от C до C1. (6.13). С увеличением модуля активной силы S растет расстояние h. Но это расстояние связано с площадью поверхности контакта и, следовательно, не может неограниченно увеличиваться. Это значит, что наступит такое состояние, когда увеличение силы S приведет к нарушению равновесия. Обозначим максимально возможную величину h буквой d. Величина d пропорциональна радиусу цилиндра и различна для разных материалов. Следовательно, если имеет место равновесие, то выполняется условие: h<=d.(6.14). d называется коэффициентом трения качения; она имеет размерность длины. Условие (6.14) можно также записать в виде Мт<=dN, или, учитывая (6.12), S<=(d/r)N.(6.15). Очевидно, что максимальный момент трения качения MTmax=dN пропорционален силе нормального давления.
9. Центр параллельных сил
точка, через которую проходит линия действия равнодействующей системы параллельных сил Fk при любом повороте всех этих сил около их точек приложения в одну и ту же сторону и на один и тот же угол. Координаты Ц. п. с. определяются формулами:
где xk, yk, zk — координаты точек приложения сил. Понятием Ц. п. с. пользуются при отыскании координат центров тяжести
10 Центр тяжести
геометрическая точка, неизменно связанная с твёрдым телом, через которую проходит равнодействующая всех сил тяжести, действующих на частицы этого тела при любом положении последнего в пространстве; она может не совпадать ни с одной из точек данного тела (например, у кольца). Если свободное тело подвешивать на нити, прикрепляемые последовательно к разным точкам тела, то направления этих нитей пересекутся в Ц. т. тела. Положение Ц. т. твёрдого тела в однородном поле тяжести совпадает с положением его центра масс. Разбивая тело на части с весами pk, для которых координаты xk, yk, zk их Ц. т. известны, можно найти координаты Ц. т. всего тела по формулам:
Ц. т. однородного тела, имеющего центр симметрии (прямоугольная или круглая пластины, шар, цилиндр и др.), находится в этом центре.
Равномерным прямолинейным движением называют движение, при котором материальная точка за любые равные промежутки времени совершает одинаковые перемещения. Скорость равномерного движения определяется по формуле

|
|
где n – перемещение тела за время t.
11.
Равноускоренным прямолинейным
движением называется движение, при
котором скорость и
ускорение ![]() направлены
вдоль одной прямой и ускорение остается
неизменным по модулю. В этом случае
модуль ускорения определяется по
формуле
направлены
вдоль одной прямой и ускорение остается
неизменным по модулю. В этом случае
модуль ускорения определяется по
формуле
|
где ![]() –
изменение модуля скорости тела за
время t. Таким образом, при равноускоренном
прямолинейном движении скорость равна
–
изменение модуля скорости тела за
время t. Таким образом, при равноускоренном
прямолинейном движении скорость равна
|
Перемещение, в свою очередь, равно
|
Также используется формула
|

Примером
равноускоренного движения является свободное
падение тела с небольшой (по сравнению
с радиусом Земли) высоты h в
безвоздушном пространстве. Ускорение
свободного падения тела не зависит от
самого тела и всегда направлено
вертикально вниз. Высота тела при этом
определяется формулой  (при
условии, что начальная скорость равна
нулю). Время падения с высоты h равно
(при
условии, что начальная скорость равна
нулю). Время падения с высоты h равно 
|
Рисунок 1.2.1. Перемещение, скорость и ускорение при равномерном прямолинейном движении. |
|
Рисунок 1.2.2.
Перемещение, скорость и ускорение при равноускоренном прямолинейном движении.