

Проектирование нечетких систем
Нечеткие системы (независимо от того, являются ли они нечеткими моделями или нечеткими контроллерами) (рис. 6) включают два главных компонента:
Базу знаний (БЗ), в которой хранятся доступные или приобретенные знания о задаче, требующей решения, в форме нечетких правил;
Механизм инференции, использующий методы нечетких рассуждений, базирующиеся на базе правил и входных сигналах, для получения выходного сигнала системы.
Оба этих компонента должны быть спроектированы так, чтобы построить систему для конкретного приложения:
БЗ формируют из знаний экспертов или путем обучения с помощью машинных методов;
Механизм инференции строят путем выбора нечетких операторов для каждого компонента (конъюнкция, импликация, дефаззификация и т.п.).
В ряде случаев операторы также параметризуются и могут быть настроены автоматическими методами.

Рис. 7
Проектирование БЗ затрагивает две подзадачи:
1. Определение базы данных (БД):
Универсум для переменных;
Масштабирующие коэффициенты или функции;
Гранулированность (число лингвистических терм) для каждой переменной;
Функции принадлежности, описывающие термы.
2. Составление базы правил (БП): формулировка базовых правил.
Как уже отмечено, существуют два различных метода для проектирования базы знаний (БЗ): информация от экспертов и с помощью машинных методов обучения на основе численной информации, полученной с помощью нечеткого моделирования или путем симуляции проектируемой системы управления.
Классификация генетических нечетких систем
С точки зрения оптимизации, чтобы найти соответствующую нечеткую систему, надо ее представить как эквивалентную параметрическую структуру и затем определить значения параметров, обеспечивающих оптимум для конкретной функции приспособленности. Поэтому первый шаг в проектировании ГНЛС решить вопрос о том, какая часть нечеткой системы подлежит оптимизации путем кодирования ее параметров в хромосомы. В этом разделе мы представим классификацию ГНЛС, соответствующую различным частям нечеткой системы, кодируемым с помощью генетической модели.
Обычно методы проектирования ГНЛС разделяют на два процесса, настройка (т.е. адаптация) и обучение. При этом будем исходить из факта, существует или нет исходная БЗ, включая БД и БП. Тогда в рамках ГНЛС мы вводим следующее деление.
Генетическая настройка. Если существует БЗ, мы применяем процесс генетической настройки для улучшения свойств нечеткой системы , но не изменяем БП. Т.е. мы настраиваем параметры НЛС с целью улучшения ее свойств, сохраняя неизменной БП.
Генетическое обучение. Вторая возможность обучать компоненты БП, к которым можно отнести адаптацию механизма инференции. Т.е. мы затрагиваем обучение компонентов БП, наряду с другими компонентами НЛС.
Генетическая настройка базы данных. Осуществляется путем определения предварительно вида и параметров масштабирующих функций входа и выхода, а также функций принадлежности, и затем настройки этих параметров и тем самым изменения формы масштабирующих функций и функций принадлежности с помощью ГА (рис. 8).
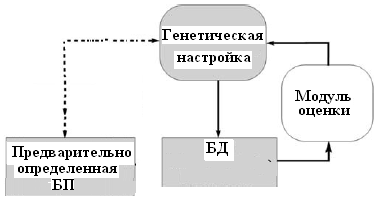
Рис. 8
Генетическое обучение базы правил. Генетическое обучение БП предполагает предопределенное множество функций принадлежности в БД, к которым правила обращается посредством лингвистических терм.

Рис. 9
Когда рассматривается задача обучения базы правил, открывается широкий диапазон возможностей. Имеется три главных подхода: питтсбургский, мичиганский и итеративный методы обучения. Питтсбургский и мичиганский подходы являются наиболее распространенными методами для обучения правил, разработанные в области ГА. Первый из них характеризуется представлением всего набора (совокупности) правил как генетического кода (хромосомы), «хромосома=набор правил», сохраняя неизменной популяцию кандидатов на роль правил и, используя селекцию, и генетические операторы для создания новых поколений наборов правил. Мичиганский подход рассматривает другую модель, в которой члены популяции являются отдельными правилами, «хромосома=правило» и набор правил представляется всей популяцией. В третьем случае, итеративном методе с помощью хромосом кодируют отдельные правила, и новое правило настраивается и добавляется в набор правил, итеративным способом.