

3.12.2.1.2 Примеры минимизации пф с помощью диаграмм Вейча
Пример 1. Для контроля за возможной деформацией металлической конструкции из-за перегрева в ее различных критических точках установлены четыре термодатчика, обозначенные ТД1, ТД2, ТД3, ТД4. Экспериментальные исследования конструкции показали, что в процессе ее эксплуатации возможны шесть сочетаний сработавших и не сработавших датчиков. При этом деформация конструкции возникала в следующих случаях:
1) сработали ТД4, ТД3 и не сработали ТД2 и ТД1;
2) сработали ТД4, ТД3, ТД2 и ТД1;
3) сработали ТД2 и не сработали ТД4, ТД3 и ТД1;
4) сработали ТД3, ТД2 и ТД1 и не сработал ТД4;
В случаях, когда:
5) сработали ТД4, ТД3, ТД2 и не сработал ТД1;
6) сработали ТД2, ТД1 и не сработали ТД4, ТД3
деформация конструкции не возникала.
Таблица 3.5
№ |
Состояние датчиков |
Деформация конструкции |
|
Сработали |
Не сработали |
||
1 |
ТД4, ТД3 |
ТД2, ТД1 |
Возникала |
2 |
ТД4 ... ТД1 |
Ї |
|
3 |
ТД2 |
ТД4, ТД3, ТД1 |
|
4 |
ТД3, ТД2, ТД1 |
ТД4 |
|
5 |
ТД4, ТД3, ТД2 |
ТД1 |
Не возникала |
6 |
ТД2, ТД1 |
ТД4, ТД3 |
|
По условию эксплуатации конструкции другие сочетания сработавших и не сработавших датчиков невозможны.
Необходимо спроектировать цифровое логическое устройство, включающее сигнал тревоги, если происходит срабатывание термодатчиков в опасном сочетании.
Обозначим цифровые сигналы на выходе термодатчиков логическими переменными: ТД4→D; ТД3→С; ТД2→В; ТД1→А, а логическую функцию, которую должно реализовать устройство контроля – F.
Составим таблицу истинности, отражающую требуемую логическую функцию (таблица 3.6).
Таблица 3.6
-
(ТД4)
(ТД3)
(ТД2)
(ТД1)
№ набора
D
C
B
A
F
0
0
0
0
0
-
1
0
0
0
1
-
2
0
0
1
0
1
3)
3
0
0
1
1
0
6)
4
0
1
0
0
-
5
0
1
0
1
-
6
0
1
1
0
-
7
0
1
1
1
1
4)
8
1
0
0
0
-
9
1
0
0
1
-
10
1
0
1
0
-
11
1
0
1
1
-
12
1
1
0
0
1
1)
13
1
1
0
1
-
14
1
1
1
0
0
5)
15
1
1
1
1
1
2)
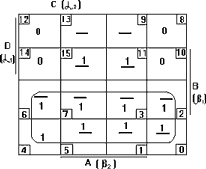
Диаграмма Вейча, отражающая данную таблицу, показана на рисунке 3.2.
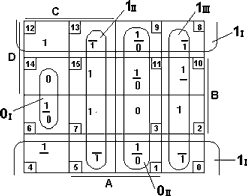
Рисунок 3.2
Если будем производить минимизацию по единицам, то в клетки, содержащие прочерки проставим дополнительные единицы.
Основные единицы накрываем тремя контурами: 1-й контур (1I) образуют клетки первой и последней строки, 2-й (1II) - клетки 2-го столбца и 3-й (1III) - 4-го столбца.
Итоговое булево выражение минимизированной ПФ имеет вид
 .(3.9)
.(3.9)
Это выражение должно быть реализовано цифровым логическим устройством, включающим сигнал тревоги.
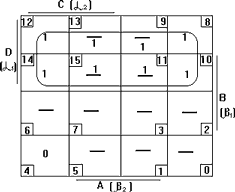
Рассматриваемую функцию можно минимизировать и по нулевым значениям (нулям). Для этого доопределяем клетки с номерами 1,6,9 и 11 нулями и накрываем два основных нуля двумя прямоугольниками, включающими два и четыре элемента (нуля). Первый прямоугольник (0I) охватывает клетки с номерами 6,14, второй (0II) – 1,3,11 и 9.
Итоговое булево выражение минимизированной ПФ имеет вид
 .(3.10)
.(3.10)
Оба выражения (3.9) и (3.10) эквивалентны, и применять следует то из них, которое проще реализуется на конкретном наборе логических элементов (базисе). Этот вопрос будет рассмотрен в следующих лекциях.
Пример 2. Необходимо разработать блок приоритетных прерываний от 2-х внешних устройств: ВУ1 и ВУ2. ВУ с меньшим номером соответствует более высокий приоритет. Упрощенная структура проектируемой системы показана на рисунке 3.3.
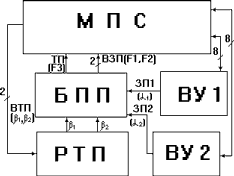
Рисунок 3.3
На схеме приняты следующие сокращения: МПС – микропроцессорная система; ВУ – внешнее устройство; БПП – блок приоритетных прерываний; ВТП – вектор текущего прерывания, который с помощью логических переменных в1, в2 описывает возможные состояния МП-системы при обслуживании запросов прерываний от ВУ (таблица 3.7); РТП – регистр текущего прерывания (запоминает значения переменных в1, в2); ЗП1, ЗП2 – запросы прерываний от ВУ1, ВУ2 (описываются переменными б1, б2); ТП – требование прерывания (логическая функция F3); ВЗП – вектор запроса прерывания (отображается комбинацией значений логических функций F1 и F2 (таблица 3.8)).
Таблица 3.7
№ набора |
в1 |
в2 |
ВТП |
0 |
0 |
0 |
ожидание |
1 |
0 |
1 |
обслуживается ВУ1 |
2 |
1 |
0 |
обслуживается ВУ2 |
3 |
1 |
1 |
– |
Таблица 3.8
ВЗП |
F1 |
F2 |
F3 =0 или неопределено |
– |
– |
Запрос от ВУ2 |
1 |
0 |
Запрос от ВУ1 |
0 |
1 |
МП-система периодически проверяет значение сигнала ТП (функция F3). Если ТП=0 (запрос на прерывание отсутствует), то значения функций F1, F2 безразличны и МПС продолжает свою работу. Если ТП=1, то МП-система анализирует значение вектора ВЗП (комбинацию функций F1, F2) и определяет номер запроса прерывания. Так как набор переменных в1=в2=1 невозможен (таблица 3.6), то функции F1, F2, F3 в таких случаях неопределены. Таким образом, задача БПП является реализация трех логических функций F1, F2, F3, каждая из которых определяется значениями четырех логических переменных: б1, б2, в1и в2.
Составим таблицу истинности (таблица 3.9) для названных функций.
Таблица 3.9
|
D |
C |
B |
A |
|
|
|
№ набора |
б1 |
б2 |
в1 |
в2 |
F3 |
F1 |
F2 |
0 |
0 |
0 |
0 |
0 |
0 |
- |
- |
1 |
0 |
0 |
0 |
1 |
0 |
- |
- |
2 |
0 |
0 |
1 |
0 |
0 |
- |
- |
3 |
0 |
0 |
1 |
1 |
- |
- |
- |
4 |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
5 |
0 |
1 |
0 |
1 |
0 |
- |
- |
6 |
0 |
1 |
1 |
0 |
0 |
- |
- |
7 |
0 |
1 |
1 |
1 |
- |
- |
- |
8 |
1 |
0 |
0 |
0 |
1 |
0 |
1 |
9 |
1 |
0 |
0 |
1 |
0 |
- |
- |
10 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
11 |
1 |
0 |
1 |
1 |
- |
- |
- |
12 |
1 |
1 |
0 |
0 |
1 |
0 |
1 |
13 |
1 |
1 |
0 |
1 |
0 |
- |
- |
14 |
1 |
1 |
1 |
0 |
1 |
0 |
1 |
15 |
1 |
1 |
1 |
1 |
- |
- |
- |
Представляем функции F1, F2, F3 диаграммами Вейча (рисунок 3.4)
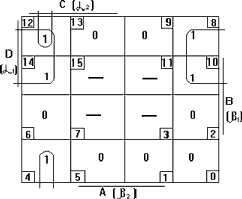
Для F3 Для F1
Для F2
Рисунок 3.4
Булевы выражения минимизированных ПФ имеют вид:
F3= .(3.11)
.(3.11)
F1= .(3.12)
.(3.12)
F2= .(3.13)
.(3.13)
Полученные выражения (3.11-3.13) имеют вполне конкретное логическое толкование и при наличии определенных навыков могли быть получены без составления таблицы истинности и минимизации ПФ.
Так, если F3=1, а в противном случае F1 и F2 безразличны, то запрос от ВУ1 в виде комбинации F1=0, F2=1 поступит лишь тогда, когда б1=1. Значение б2 безразлично, так как даже при б1=б2=1 все равно б1 имеет более высокий приоритет. Если б1=0, а F3=1, то это значит, что требование прерывания вызвано запросом от ВУ2 (б2=1). При записи выражения (3.11) можно было руководствоваться следующими соображениями. F3=1 в двух случаях. Во-первых, если поступил запрос от ВУ1 (б1=1) и при этом МП-система ожидает запроса либо обслуживает прерывание от ВУ2 (в обоих случаях в2=0, см. таблицу 3.8). Во вторых, если поступил запрос от ВУ2 (б2=1) и при этом МП-сиcтема находится в состоянии ожидания (в1=в2=0). Сказанное соответствует двум составляющим выражения (3.11).
На втором примере мы прошли 2 этапа синтеза комбинационных цифровых электронных устройств:
1. Представление переключательных функций в форме, которая является исходной для выбранного метода минимизации - в нашем случае в виде таблицы истинности и диаграммы Вейча.
2. Получение минимальной ДНФ для каждого выхода комбинационной схемы.