

26. Понятие агрегативной модели.
Агрегат представляет собой математическую схему весьма общего вида, частными случаями которой являются функции алгебры логики, релейно-контактные схемы, конечные автоматы, всевозможные классы систем массового обслуживания, динамические системы, описываемые обыкновенными дифференциальными уравнениями и некоторые другие объекты. С точки зрения моделирования агрегат выступает как достаточно универсальный переработчик информации – он воспринимает входные и управляющие сигналы и выдает выходные сигналы.
Рассмотрим класс сложных систем, представляющих собой конструкции из агрегатов, обладающих следующим свойством: существует такое (в общем случае неоднозначное) расчленение системы на элементы, при котором каждый полученный элемент представляет собой агрегат. Такого рода сложные системы будем называть агрегативными или А-системами. Каждый элемент А-системы, будучи в общем случае агрегатом, не обязательно должен обладать полным комплектом свойств агрегата: он может быть и более простым объектом, представляющим собой частный случай агрегата. Вместе с тем среди элементов А-системы не может быть ни одного элемента, который не являлся бы агрегатом (с полным или частичным комплектом свойств). Другими словами, среди элементов А-системы не могут содержаться объекты более общего характера, чем агрегат.
Вся информация, циркулирующая в А-системе, делится на внешнюю (поступающую извне от объектов, не являющихся элементами данной системы) и внутреннюю, вырабатываемую агрегатами самой системы. Обмен информацией между А-системой и внешней средой происходит через агрегаты, называемые полюсами системы. Так имеются входные полюса, представляющие собой агрегаты, для которых вводимая информация, поступающая в виде x-сообщений, является полностью или частично внешней (A1 и A4 на рис. 11). Управляющие полюса (A1,A3,A6). Заметим, что А1 является одновременно входным и управляющим полюсом системы. Выходные полюса (A3,A7). Агрегаты, не являющиеся полюсами, называются внутренними агрегатами. В частном случае А-система может не содержать внутренних агрегатов, а состоять только из полюсов. Могут быть также случаи, когда в А-системе отсутствуют входные и управляющие полюсы. Наконец, А-система может состоять лишь из одного агрегата. Этот агрегат одновременно может быть входным, управляющим и выходным полюсом А-системы.
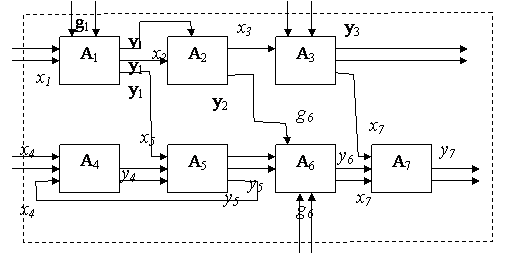
Рис. 11. Агрегативная система
Передача информации в А-системе происходит мгновенно (см 7.2), т.е. момент tў выдачи каким-нибудь из агрегатов является также моментом поступления входной или управляющей информации в некоторый агрегат системы или, наконец, моментом выдачи информации выходным полюсом системы. Такое предположение не является стеснительным ограничением. Если в реальной системе передача информации между ее элементами происходит с задержкой по времени, то соответствующая линия передачи представляется как самостоятельный агрегат, осуществляющий задержку. Тогда в формализованной схеме передача информации между элементами будет происходить мгновенно.