

2. Измерительные механизмы
Измерительным
механизмом (ИМ) называют часть конструкции
средства измерений, состоящей из
элементов, взаимодействие которых
вызывает их взаимное перемещение.![]() Наиболее
часто измерительный механизм преобразует
электрическую или магнитную энергию в
механическую энергию, вызывающую поворот
ее подвижной части вокруг оси на некоторый
угол ,
являющийся функцией воздействующей
величины y.
Момент вращения ИМ, имеющего такую
подвижную часть, описывается
дифференциальным уравнением вида:
Наиболее
часто измерительный механизм преобразует
электрическую или магнитную энергию в
механическую энергию, вызывающую поворот
ее подвижной части вокруг оси на некоторый
угол ,
являющийся функцией воздействующей
величины y.
Момент вращения ИМ, имеющего такую
подвижную часть, описывается
дифференциальным уравнением вида:
![]() (4.1)
(4.1)
где
![]() скорость изменения энергии поля,
созданной сигналом y,
по углу поворота
скорость изменения энергии поля,
созданной сигналом y,
по углу поворота
![]() .
.
Но для того чтобы каждому значению воздействующей величины соответствовал определенный угол поворота подвижной части ИМ, необходимо вращающий момент уравновесить моментом противодействия, который создается механическим способом. Его значение прямо пропорционально углу поворота:
![]() ,
(4.2) где
,
(4.2) где
![]() коэффициент
противодействия, зависящий от типа
этого устройства и его свойств.
коэффициент
противодействия, зависящий от типа
этого устройства и его свойств.
Кроме
этого, для успокоения подвижной части
(демпфирования ее колебаний) необходимо
создать и момент успокоения
![]() Следовательно, в состав измерительного
механизма должны входить следующие
устройства:
Следовательно, в состав измерительного
механизма должны входить следующие
устройства:
- преобразователь электрического сигнала в электрическое или магнитное поле, расположенный в неподвижной части механизма;
- поворотный механизм, создающий вращающий момент подвижной части;
- устройство противодействия (как правило – пружина);
- успокоительное устройство (успокоитель). Успокоители могут быть воздушными, жидкостными или магнитоиндукционными.
По принципу преобразования электрической энергии в энергию механического перемещения подвижной части измерительные механизмы и, соответственно, измерительные приборы с их использованием, делятся на магнитоэлектрические, электромагнитные, электродинамические, электроста-тические и индукционные (табл.4). Они имеют условные обозначения, которые наносятся на каждый прибор согласно ГОСТ 23217-78 совместно с информацией о единицах измерения, класса точности, нормальном положении прибора и т.д.
Таблица 4

В средствах измерений, используемых в электротехнике, наибольшее распространение получили магнитоэлектрические и электромагнитные измерительные механизмы.
3. Измерительный механизм магнитоэлектрической системы
Принцип его работы основан на взаимодействии магнитного поля постоянного магнита 1 и магнитного поля рамки с током 4. Рамка образуется тонким медным проводом диаметром 0.02 – 0.03 мм, намотанным на бумажный или алюминиевый каркас прямоугольной формы (рис.2).
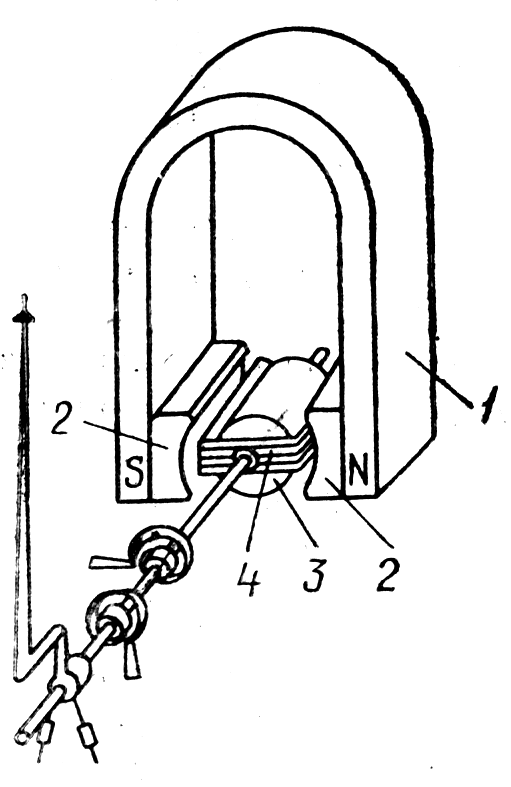
Рис. 2
К катушке крепятся полуоси, закрепленные в узлах поворота и стрелочный указатель, а также спиральные пружины. (Кроме того на рис. 2 изображены: 2 – полюсные наконечники, 3- ферритовый сердечник).
Момент вращения
![]() (4.3)
(4.3)
где: В – магнитная индукция;
S – площадь витка рамки;
n – количество витков;
![]() – ток в проводе
рамки.
– ток в проводе
рамки.
Но
![]() ,
тогда:
,
тогда:
![]() (4.4)
(4.4)
Из анализа данного выражения следует:
На основе такого типа ИМ выполняются измерители тока.
2. Между током в рамке и углом поворота стрелочного указателя линейная зависимость, что позволяет иметь линейную шкалу прибора.
3. Так как рамка должна быть легкой, то её провод очень тонкий, а ток небольшой. Поэтому приборы такого типа – это миллиамперметры или даже микроамперметры.
4. Очевидно, что ток в рамке должен быть одного направления. Поэтому необходимо строго выполнять условие полярности при подключении в цепь постоянного напряжения, а при измерениях в цепи переменного тока необходимо его предварительное выпрямление.
Измерительные механизмы такого типа находят широкое применение в качестве устройств измерения в различных более сложных приборах.
Основная погрешность измерения такими ИМ обусловлена наличием трения в опорах и точностью градуировки шкалы, а также остаточной деформацией спиральных пружин.
Дополнительная погрешность обусловлена действием температуры на детали механизма.