

Тема 9. Анализ линейных прерывных систем ра
9.1 Основные понятие и определения
Прерывистыми называют системы, у которых ошибка управления определяется лишь дискретными, как правило, равноотстоящими моментами времени, а в промежутках между этими моментами управление осуществляется в соответствии с ранее вычисленными значениями рассогласования.
Существует 2 причины, которые привели к необходимости рассмотрения систем прерывистого регулирования:
1. использование в радиотехнике прерывистых сигналов с амплитудно-импульсной модуляцией (АИМ), широтно-импульсной модуляцией (ШИМ), время-импульсной модуляцией (ВИМ), кодово-импульсной модуляцией (КИМ);
2. широкое использование цифровой обработки сигналов с дискретизацией по времени и квантованию по уровню.
На структурных схемах систем прерывистого регулирования содержится импульсный элемент (ИЭ)
![]()

где ГН – генератор несущей, который вырабатывает последовательность прямоугольных видеоимпульсов
ИМ – импульсный модулятор преобразует один или несколько параметров видеоимпульсов в зависимости от закона модуляции.
Пусть моделированная функция линейно возрастает
1. АИМ-1
П ри
АИМ-1 амплитуда импульсов следит за
модулирующей функцией, и системы
называются импульсными.
ри
АИМ-1 амплитуда импульсов следит за
модулирующей функцией, и системы
называются импульсными.
2. АИМ-2
 При АИМ-2 амплитуда импульса
постоянна и совпадает с моделирующей
функцией только в начале импульса, и
такие системы называют дискретными.
При АИМ-2 амплитуда импульса
постоянна и совпадает с моделирующей
функцией только в начале импульса, и
такие системы называют дискретными.
3. ШИМ

При ШИМ модуляции изменяется длительность импульса в зависимости от моделирующей функции.
4. ВИМ
П ри
ВИМ модуляции изменяется временное
положение импульсов в зависимости от
значения моделирующей функции.
ри
ВИМ модуляции изменяется временное
положение импульсов в зависимости от
значения моделирующей функции.
5. КИМ
![]()
где АЦП осуществляет дискретизацию сигнала по времени и квантование по уровню. Это и есть КИМ модуляция.
Цифровое вычислительное устройство (ЦВУ) преобразует двоичные коды в соответствии с заданным алгоритмом.
ЦАП преобразует двоичные коды в напряжение.
Системы прерывистого регулирования делятся на разомкнутые и замкнутые.
Структурная схема разомкнутой системы имеет вид:
![]()
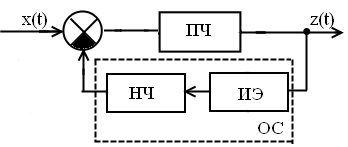
В замкнутых системах импульсный элемент содержится в прямой части ПЧ или в обратной связи:

9.2 Примеры построения систем прерывистого регулирования
9.2.1 Импульсная система апч
Импульсная система АПЧ предназначена для стабилизации частоты, слежения за частотой, демодуляции частотно-моделированных импульсных сигналов.
Функциональная схема имеет следующий вид:

где ВУС – видеоусилитель
ПД – пиковый детектор
УПТ – усилитель постоянного тока
На выходе ЧД сигнал будет иметь следующий вид:
Используется АИМ-1 и поэтому система называется импульсной.
Структурная схема имеет следующий вид:

9.2.2 Дискретная система асд
Дискретная система АСД предназначена для слежения за временным положением импульса.
Функциональная схема имеет следующий вид:

где ИБ – интегрирующий блок.
На выходе
![]() сигнал имеет следующий вид:
сигнал имеет следующий вид:
В системе используется АИМ-2 и поэтому она называется дискретной.
Структурная схема имеет следующий вид:
