

4. Обґрунтування і вибір способу керування двигуном
Визначальним при виборі способу регулювання швидкості двигуна є діапазон регулювання, плавність, економічність і точність.
Для заданого діапазону Д=55 вибираємо регулювання швидкості зміною напруги живлення, при цьому регулювання повинне бути плавним. Такий спосіб регулювання буде економічним.
5. Вибір системи керування електроприводом
Системи
керування регульованим електроприводом
призначені для стабілізації швидкості
з точністю і обмеження струму двигуна в статичних
і динамічних режимах. Технічними
умовами задана точність регулювання
і обмеження струму двигуна в статичних
і динамічних режимах. Технічними
умовами задана точність регулювання
 Таку точність регулювання може забезпечити
система керування зі зворотнім зв’язком
за напругою і струмом двигуна. Така
система регулювання має високу швидкодію.
Таку точність регулювання може забезпечити
система керування зі зворотнім зв’язком
за напругою і струмом двигуна. Така
система регулювання має високу швидкодію.
6. Розрахунки електромеханічних характеристик двигуна і автоматизованого електропривода
Натуральна механічна характеристика двигуна постійного струму незалежного збудження описується рівнянням
 .
/6.1/
.
/6.1/
При
розрахунках частіше користуються
електромеханічною характеристикою,
яку одержують з /6.1/,
підставивши
 :
:
 (
( ,
,
де
 – опір якорного кола двигуна;
– опір якорного кола двигуна;
 – коефіцієнт
передачі двигуна.
– коефіцієнт
передачі двигуна.
 (
( /6.2/
/6.2/
За
формулою /6.2/, підставляючи значення
 та
та
 ,
будують електромеханічну характеристику
двигуна :
,
будують електромеханічну характеристику
двигуна :
 при
при
 при
при
Електромеханічна характеристика двигуна
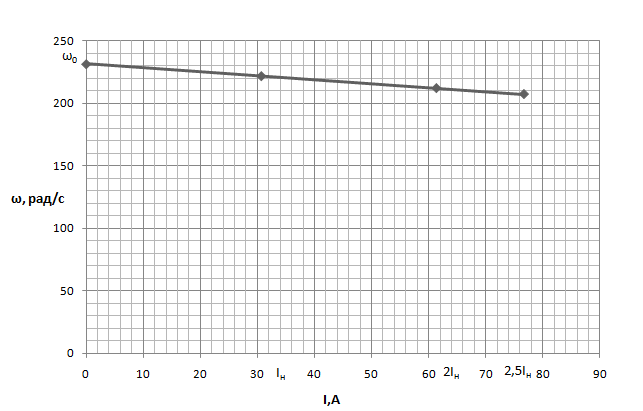
Рисунок 1. Електромеханічна характеристика автоматизованого електропривода
Електромеханічна характеристика автоматизованого електропривода залежить від його структури.
В регульованому електроприводі живлення двигуна здійснюється від перетворювача електричної енергії (ПЕЕ). В якості ПЕЕ в електроприводі постійного струму використовують керовані випрямлячі (ВК) змінного струму у постійний на базі тиристорів чи транзисторів, а також перетворювачі з широтно-імпульсною модуляцією (ШІМ). В електроприводах змінного струму в якості ПЕЕ використовують частотні перетворювачі.
Керовані перетворювачі. В залежності від потужності двигуна постійного струму вибирають різні схеми випрямляння – від однофазних до багатофазних. В електроприводах середньої потужності (до 30 кВт) використовують трифазну нульову схему наведену на рис. 2

Рисунок 2. Трифазна нульова схема випрямляння
Схема
складається із узгоджувального
трансформатора Т,
тиристорів TV
системи імпульсно-фазового керування
(СІФК) і згладжуючого реактора
 .
.
Основними
характеристиками перетворювача є:
характеристика керування
 і зовнішня характеристика
і зовнішня характеристика
 .
Властивості тиристорного перетворювача
визначаються законом зміни ЕРС вторинної
обмотки трансформатора
.
Властивості тиристорного перетворювача
визначаються законом зміни ЕРС вторинної
обмотки трансформатора
 при випрямленому струмі
при випрямленому струмі
 в залежності від вхідної величини, якою
є кут керування
в залежності від вхідної величини, якою
є кут керування
 .
.
У загальному випадку
 ,
,
де
 де
де
 діюче значення фазної ЕРС вторинної
обмотки трансформатора,
діюче значення фазної ЕРС вторинної
обмотки трансформатора,
 число фаз. Для трифазної нульової схеми
число фаз. Для трифазної нульової схеми
 .
Середній струм
.
Середній струм
 і типова потужність трансформатора
і типова потужність трансформатора
 .
.

Рисунок 3. Структурна схема СІФК з вертикальним принципом керування
В
даний час системи імпульсно-фазового
керування виготовляються з використанням
напівпровідникових елементів з
вертикальним принципом керування,
структурна схема якого показана на
рис.3. На вході генератора імпульсів ГІ
порівнюються опорна напруга
 (наприклад, пилкоподібна) генератора
змінної напруги ГЗН з напругою керування
(наприклад, пилкоподібна) генератора
змінної напруги ГЗН з напругою керування
 вхідного пристрою ВП. Напруга
залежить від режиму роботи двигуна,
тобто формується задаючою напругою і
напругою зворотних зв’язків. Формування
керуючого імпульсу ГІ відбувається в
момент зміни знаку різниці напруг
вхідного пристрою ВП. Напруга
залежить від режиму роботи двигуна,
тобто формується задаючою напругою і
напругою зворотних зв’язків. Формування
керуючого імпульсу ГІ відбувається в
момент зміни знаку різниці напруг
 і
,
що здійснює порівняльна ланка ПЛ.
Зазвичай, число фаз ГЗН і ВП відповідає
числу фаз випрямляча.
і
,
що здійснює порівняльна ланка ПЛ.
Зазвичай, число фаз ГЗН і ВП відповідає
числу фаз випрямляча.
Характеристика
 є нелінійною і залежить від форми опорної
напруги. Тому з метою уніфікації
розрахунків систем автоматичного
регулювання замість характеристик
,
використовують характеристику
є нелінійною і залежить від форми опорної
напруги. Тому з метою уніфікації
розрахунків систем автоматичного
регулювання замість характеристик
,
використовують характеристику
 ,
яка у відносних одиницях наведена на
рис.4.
,
яка у відносних одиницях наведена на
рис.4.
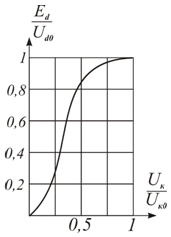
Рисунок 4. Харектеристика
При
живленні ВК кола якоря двигуна і кутах
комутації
 рівняння зовнішньої характеристики
має вид :
рівняння зовнішньої характеристики
має вид :
 /6.3/
/6.3/
де
 і
і
 відповідно зведені до вторинної обмотки
індуктивний опір розсіювання обмоток
фази трансформатора та їх активний
опір;
відповідно зведені до вторинної обмотки
індуктивний опір розсіювання обмоток
фази трансформатора та їх активний
опір;
 – падіння напруги на відкритому
тиристорі.
– падіння напруги на відкритому
тиристорі.
Напруга на якорі двигуна:
 /6.4/
/6.4/
де
 квівалентний
опір керованого випрямляча;
квівалентний
опір керованого випрямляча;
 Ом
– активний опір згладжуючого реактора.
Ом
– активний опір згладжуючого реактора.

Індуктивний опір:
 Ом
/6.5/
Ом
/6.5/
де
 напруга короткого замикання, яка для
трансформаторів серії ТС дорівнює 2 %,
напруга короткого замикання, яка для
трансформаторів серії ТС дорівнює 2 %,
 В
і
В
і
 А
– відповідно номінальні фазні напруга
і струм первинної обмотки трансформатора,
А
– відповідно номінальні фазні напруга
і струм первинної обмотки трансформатора,
 – коефіцієнт трансформації.
– коефіцієнт трансформації.
Щоби
напруга на якорі двигуна
 або
або
 ,
діюче значення напруги вторинної обмотки
трансформатора
,
діюче значення напруги вторинної обмотки
трансформатора
 відповідно повинно бути рівним 104 В чи
208 В.
відповідно повинно бути рівним 104 В чи
208 В.
За цією умови коефіцієнт трансформації :
 /6.6/
/6.6/
Активний опір фази:
 Ом
/6.7/
Ом
/6.7/
де
 потужність короткого замикання
трансформатора, яка залежить від його
потужності. Для трансформаторів серії
ТС дані
потужність короткого замикання
трансформатора, яка залежить від його
потужності. Для трансформаторів серії
ТС дані
 наведені в табл.3.
наведені в табл.3.
Таблиця 3
|
6,3 |
10 |
16 |
25 |
|
175 |
220 |
340 |
380 |


Оскільки
за паспортом двигуна S=14
кВ А,
а в таблиці
є значення тільки для S
=6.3, 10, 16, 25 кВ
А
, то S
можна знайти тільки шляхом інтерполяції
за двома заданими точками. Запишемо
рівняння прямої у відрізках:
А,
а в таблиці
є значення тільки для S
=6.3, 10, 16, 25 кВ
А
, то S
можна знайти тільки шляхом інтерполяції
за двома заданими точками. Запишемо
рівняння прямої у відрізках:
 .
.
Нашому
випадку у= ,
а
х=S . З
таблиці 3 маємо, що S=14
S1=10
м, S2=16
м,
,
а
х=S . З
таблиці 3 маємо, що S=14
S1=10
м, S2=16
м,
 =220Вт,
=220Вт,
 =340Вт.
Підставляємо
дані значення у рівняння прямої:
=340Вт.
Підставляємо
дані значення у рівняння прямої:
 ;
;
 ;
;
 ;
;
 .
.