

Задание:
Рассчитать цилиндрическую косозубую передачу в закрытом корпусе по следующим данным:
ω2 = 39 рад/с - угловая частота выходного вала;
Т2 = 205 Нм - крутящий момент на выходном валу;
Lh = 10000 час. - срок службы.
Нагрузка постоянная, но во время пуска она кратковременно повышается в 1,6 раза. Входной и выходной валы редуктора соединяются с валом электродвигателя и валом рабочей машины при помощи муфт упругих втулочно-пальцевых (МУВП).
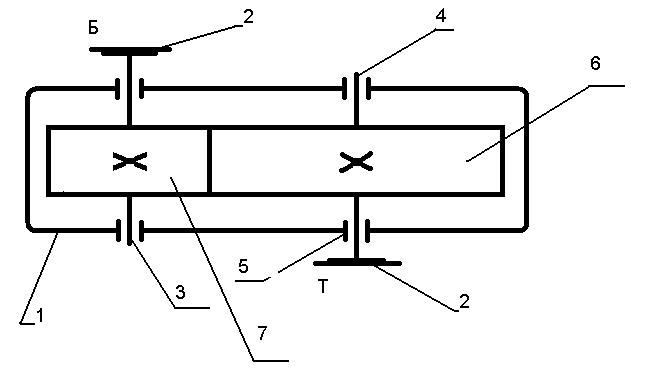
Рис 1.1. Кинематическая схема редуктора.
 Корпус
КорпусПолумуфты
Быстроходный вал
Тихоходный вал
Опоры
Зубчатое колесо
Шестерня
1. Кинематический и силовой расчет передачи.
1.1. Определяем частоту вращения вала рабочей машины:
![]() об/мин; (1.1)
об/мин; (1.1)
где n2 – частота вращения вала рабочей машины, мин-1;
w2 – угловая частота вращения вала рабочей машины, с-1.
1.2. Определяем потребную мощность на валу рабочей машины:
![]() Вт (1.2)
Вт (1.2)
где Р2 – потребная мощность на валу рабочей машины, Вт;
Т2 – крутящий момент навалу рабочей машины, Н×м.
1.3. Рассчитываем потребную мощность электродвигателя:
![]() кВт (1.3)
кВт (1.3)
где Р1 – потребная мощность электродвигателя, кВт;
h – КПД одноступенчатого цилиндрического редуктора с косыми зубьями, h = 0,96…0,98.
1.4. По данным формулы (1.3) и ГОСТ 19253-81 выбираем электродвигатель. Наиболее широко в приводах машин используют асинхронные двигатели трехфазного тока единой серии 4А.
Выбирая электродвигатель, следует помнить, что при одной и той же мощности с уменьшением частоты вращения двигателя увеличиваются его габаритные размеры и масса, значительно увеличивается его стоимость. Однако с увеличением частоты вращения усложняется передаточный механизм.
Мощность Рд =11.0 кВт
Тип двигателя 4А160S6
Частота вращения nд =975 об/мин.
Результаты выбора электродвигателя приводим в таблице 1.1.
Р1 кВт |
Рд кВт |
nд об/мин |
n2 об/мин |
|
u СТ СЭВ 221—75 |
|
9.6 |
11 |
2900 |
267.5 |
10.8 |
11.2 |
3.6 |
1460 |
5.5 |
5.6 |
1.8 |
|||
975 |
3.6 |
3.55 |
1.4 |
|||
730 |
2.7 |
2.8 |
3.6 |
Окончательно
принимаем электродвигатель, для которого
передаточное отношение не больше 8, и
отклонение фактического передаточного
отношения от номи нального
– минимальное:
нального
– минимальное:
Тип 4А160S6
Мощность 11,0 кВт
Частота вращения вала 975 об/мин.
1.5. Уточняем крутящий момент и частоту вращения на быстроходном и тихоходном валу в соответствии с принятым электродвигателем.
Примечание: при определении моментов Т1 и Т2 мощность Рд подставлять в Вт.
Быстроходный вал:
![]() об/мин;
об/мин;
![]() рад/с;
рад/с;
![]() Нм.
Нм.
Тихоходный вал:
![]() об/мин;
об/мин; ![]() рад/с;
рад/с; ![]() Нм.
Нм.
2. Выбор материала и определение допускаемых напряжений [sH] и [sF].
2.1. Для изготовления колес по таблице 2.1 материал принимаем одной марки. Разность твердостей материала обеспечиваем методом термической обработки. Для предотвращения заедания зубчатых колес твердость шестерни должна быть на 30-70 HB выше, чем твердость колеса.
Таблица 2.1
|
Материал |
Термообработка |
Твердость НВ |
sв, МПа |
sт, МПа |
1 |
Для шестерни сталь 40Х |
Улучшение |
260..302 |
900 |
590 |
2 |
Для колеса сталь 40Х |
Нормализация |
200..230 |
760 |
490 |